Articles in the Mapping Category


UAVs/drones can be simply defined as robotics planes. It is also known as Unmanned Aerial Vehicles (UAV), unmanned aircraft systems (UAS) and remotely piloted aircraft (RPAs) Ivosevic et.al. (2015). Malaysia Department of Civil Aviation (2008)…

The construction of infrastructure requires land on which the infrastructure is planned. If the constructor does not have any formal rights to that land, land use conversion needs to takes place such that the land can be legally acquired by the construction…

India is at an infrastructure crossroads. As demand for infrastructure development has grown, the country’s tireless growth has raced ahead of its ability to develop and deliver the necessary number infrastructure projects…
Balloons can be regarded as the oldest platform for aerial observations. As early as in 1858, Tournachon aboard a hotair balloon…

Unmanned Aerial Vehicle (UAV) System has gained popularity in the field of photogrammetry, remote sensing and geospatial engineering for civilian applications…

Water gates in the Isahaya bay were closed because of reclamation construction which started in 1989, and water conversion became a very serious problem. Then, the authors have carried out remote sensing research with a few centimeters…

Information has generally been one of the most precious goods in recent decades. It is possible to buy and sell it, to barter it or just only freely provide it. The value of the information itself is very often based on the fact that it is…

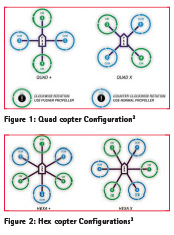
Drones are defined as flying robots in simple terms which are formally known as Unmanned Aerial Vehicles (UAV). The main distinctive characteristic of drones is the design to be operated with no onboard pilot. They are operated by remote controller or can fly autonomously through software controlled flight plans….

The three authors of this paper work at the Applied Geodetic Division of the National Laboratory for Civil Engineering (LNEC), in Lisbon, Portugal. LNEC is a state owned research and development institution founded in 1946…

Our end users are used to GPS navigation, and expect the same service on indoors – a blue dot on their own mobile screen accurate to a few meters. Furthermore, they expect free and effortless service with low latency and low battery and data usage…








 (5.00 out of 5)
(5.00 out of 5)