| Mapping | |
Low cost aerial mapping with consumer grade drones
This study presents an overview of using inexpensive drones for aerial mapping complementary to traditional photogrammetry as well as modern survey grade drones |
 |
|
 |
|
 |
|
 |
|
Drones are defined as flying robots in simple terms which are formally known as Unmanned Aerial Vehicles (UAV). The main distinctive characteristic of drones is the design to be operated with no onboard pilot. They are operated by remote controller or can fly autonomously through software controlled flight plans.
Drones are initially invented for military purposes but these exciting equipment are now being used for civilian application like photography, filmography, journalism, delivery systems, structural safety inspections and many more. Usage of drones in the field of geomatics is explored in recent studies and now being used as a platform for photogrammetric and LiDAR data collection. The emerging technology of drones can be used in geographic mapping alternative to high cost traditional photogrammetry and ground surveying.
Remotely sensed data obtained from drones are suited for various applications of mapping in both 2D and 3D domains. As described in literature (Nex & Remondino, 2014; Zongijan, 2008), fields as environmental surveying, forestry and agricultural mapping, archeology and cultural heritage mapping, traffic monitoring are typical fields for aerial mapping highly complies with drones. Considering these applications, commercially available survey grade drones as Sensefly eBee and Trimble UX5 are now developed.
Compared to traditional remote sensing methods, there are significant advantages of drones in applications of mapping (Dustin, 2015). Drones provide inexpensive platform for aerial data collection with no requirement of onboard personnel to carry out flight operations. They are inherently safe and can reach to places where manned flight is difficult or dangerous to access.
Drones establish a powerful alternative for traditional data capture in mapping application with high spatial and temporal resolution. They can fly in low altitudes enabling to collect data with high amount of details and can be deployed rapidly as soon as th ere is a requirement. The limitation of satellites and traditional aerial remote sensing of restricted maneuverability and limited availability (Zongijan, 2008) can be overcome with drones but also with certain limitations as low range and endurance.
Despite of drones designed for specific application of mapping, there are consumer grade drones which are popular among the community. Consumer grade personal drones are currently a hobbyist’s item most often used for aerial photography, but there is high potential of using in applications of mapping. Today’s consumer grade drones are equipped with GNSS navigation system and inertial measurement unit (IMU) which fulfill the essential requirement of automated aerial surveys as it is required to follow predetermined flight plan. Hence accurate determination of the position of the aircraft by GNSS system and the orientation by IMU is vital for accurate aerial surveying. The payload of consumer grade drones either fixed with a digital camera or provide facilities to carry external instrument mainly an imaging device.
The recent technological advancements and availability of GNSS Systems (GPS/ GLONASS), inertial measurement units (IMUs) and digital compact cameras has introduced a great potential of using inexpensive consumer grade drones as mobile mapping systems, as a low-cost alternative to survey grade drones which further reduces costs compared to the traditional aerial mapping. This study is performed to assess the applicability and accuracy of Low cost consumer grade drones for aerial mapping.
Study area and equipment
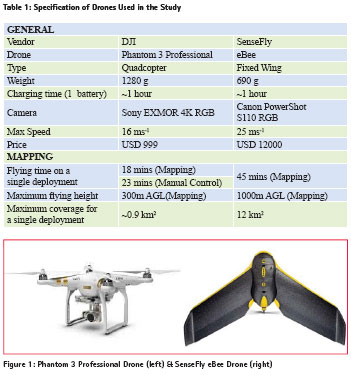
The study area in Colombo 7, Sri Lanka was chosen as previously surveyed ground control points were available. Study area is approximately 1.28 km2 in size, situated in the commercial capital of Sri Lanka which is a high dense urban area of. The area was aerial surveyed with Phantom 3 Professional consumer grade drone and SenseFly eBee survey grade drone. To meet the primary objective of this study, the accuracy of the results, costs and overall complexity of the two different systems is compared under the special focus of the photogrammetric performance. GENERAL Vendor DJI SenseFly Drone Phantom 3 Professional eBee Type Quadcopter Fixed Wing Weight 1280 g 690 g Charging time (1 battery) ~1 hour ~1 hour Camera Sony EXMOR 4K RGB Canon PowerShot S110 RGB Max Speed 16 ms-1 25 ms-1 Price USD 999 USD 12000 MAPPING Flying time on a single deployment 18 mins (Mapping) 45 mins (Mapping) 23 mins (Manual Control) Maximum flying height 300m AGL(Mapping) 1000m AGL (Mapping) Maximum coverage for a single deployment ~0.9 km2 12 km2 Table 1: Specification of Drones Used in the Study Both Sensefly eBee and Phantom 3 professional drone fall to Micro UAV category (Bendea et al., 2008) according to their weight, endurance and range. Sensefly eBee is a survey grade fixed wing drone manufactured by senseFly ltd. in Switzerland. It is now being popular as professional mapping drone with in geomatics industry for various applications. The eBee drone comes with ground station and a dedicated flight planning and management software, eMotion. The camera should be separately mounted as it should be chosen to suit the purpose of the survey. The Phantom 3 Professional drone is a quad copter by Da-Jiang Innovations Science and Technology Co., Ltd. (DJI) which comes with a factory built 4K camera with 3-axis gimbal stabilizer. The controller is an easy to operate remote device which works with a smart phone. Phantom 3 Professional drone is chosen as the consumer grade drone in this study because of its affordability and popularity among the civilian community for photography.
Photogrammetric Ground Control
Ground Control Points (GCPs) are points of known coordinates in the area of interest. Their coordinates have been measured with traditional surveying methods or have been obtained by other sources (LiDAR, older maps of the area, Web Map Service). A Ground control is required to calculate scale, orientation, and absolute position information of the products with increased accuracy (Wolf & Dewitt, 2000). It is possible to obtain georeferenced products even without GCPs as the images are geocoded by the GPS device of the drone but it is highly recommended to have significant amount of GCPs to obtain reliable products. GCPs increase the absolute accuracy of a project, placing the model at the exact position on the Earth.
In modern surveying applications, kinematic GNSS Positioning is identified as the most efficient and effective way of establishing ground control as it meets the required aspects in most scenarios (Wolf & Dewitt, 2000). For this study, pre-existing survey data is used to establish the ground control, which was measured with latest CORS GNSS technology introduced very recently in Sri Lanka. A CORS or Continuous Observation Reference Station Network is a virtual RTK correction broadcasting network comprises of several permanent ground located high accuracy GNSS receivers (Snay & Soler, 2008). It has a high accuracy as 8mm+0.5ppmRMS in planimetric measurements and 15mm+0.5ppmRMS in vertical measurements. Availability of these types of network eliminates the necessity of having ground marked reference points for control surveying. Location data observed by several high accuracy GNSS receivers, commonly known as CORS are being processed at a central server. Processed data will be broadcasted to RTK Receivers via GPRS allowing users to obtain high accuracy positioning coordinates.
The GCPs are selected from the total of 79 measured points which meet general criterion to establish photogrammetric control. In general, images of acceptable photo control points must lie in favorable locations in the photographs and should be sharp, well defined, and positively identified on photos. The GCPs should be placed homogeneously in the area of interest. A minimum number of 5 GCPs is recommended and 5 to 10 GCPs are usually enough, even for large projects (Agisoft, 2013). More GCPs do not contribute significantly to increasing the accuracy. In cases that the topography of the area is complex, then more GCPs will, indeed, lead to better more accurate reconstruction.
Flight planning and image acquisition
Designing and executing good image acquisition plan is the most important part of any aerial photogrammetric project as the ultimate success of any photogrammetric project depends more upon good quality photography than on any other aspect (Wolf & Dewitt, 2000). If the collected dataset is insufficient in quality, it will lead to poor results even total failure in processing. To avoid redoing field work which is expensive and time consuming, it is essential to plan the work correctly according to the requirements.
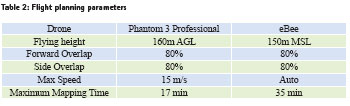
A flight plan generally consists of two items: a flight map, which shows where the photos are to be taken; and specifications: which outline how to take them, including specific requirements such as camera requirements, scale, flying height, end lap, side lap, and tilt and crab tolerances. A flight plan which gives optimum specifications for a project can be prepared only after careful consideration of all the many variables which influence aerial photography. But with today’s flight planning software, flight map is generated automatically as only the vital parameters are given to the software manually. This includes area of interest, flying altitude, overlap, maximum speed etc. Flying height and image overlap are considered as the vital parameters in every flight plan. Relative accuracy capabilities in photogrammetric mapping, whether planimetric or vertical, depend upon many variables, but the most important is flying height above ground. Ground Sampling Distance varies with the flying height so it has direct influence on the achievable accuracy and amount of details in final products.
In modern photogrammetric processing, the entire process is based on automatically finding thousands of common points between images. These points are called key points. When there is high overlap between 2 successive images, the common area captured is larger and more key points can be matched together. The more key points there are, the more accurately 3D points can be computed. The image overlap parameter should be determined with an awareness of the terrain geometry. Considering the general cases recommended overlap of 80% of side and end overlap is used.
The flight was done in full autonomous mode for both drones with continuous monitoring. Availability onboard of GNSS/INS navigation devices in both drones are make it possible for full autonomous flight (take-off, navigation, and landing) and to guide the image acquisition according to the flight plan. Flight Planning Software Sensefly eBee drone comes with a dedicated flight planning and management software called eMotion. . It is used to plan, simulate, monitor and control mapping flight of eBee drones and it support all eBee standard, eBee RTK and eBee Ag drones (Swinglet, 2015). The software operates in Windows environment and used for flight planning simulation, flight monitoring and in flight controlling. The software comes with features like automatic flight planning, automatic calculation of flight altitude, real time flight status monitoring, one click emergency maneuvers etc.
Unlike survey grade drones, other consumer grade drones do not comes with photogrammetric flight planning software. But there are third party flight planning application developed for some consumer grade drones. For flight planning with Phantom 3 drone, such application named Map Pilot for DJI is used. Map Pilot for DJI is a software for Flight Planning, Mission Management and the actual Mission Flight Operation for DJI drones. Currently the software operates in iOS environment for Apple iPhone and iPad devices. This app is developed by Maps Made Easy using the DJI SDK for easy data acquisition for aerial mapping with drones. The app combines advanced features like automatic flight path creation, overlap management, speed management, multi flight coordination, multi battery management, base map caching for offline operations, etc. yet preserving an easy to operate environment.

Photogrammetric Processing and Ground Control
Point Cloud and Mesh Generation
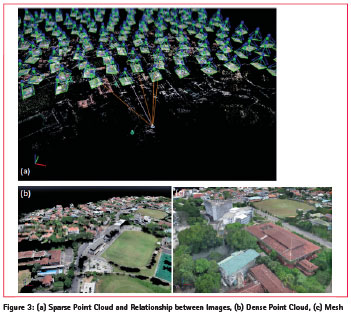
Once a set of images has been oriented, the next steps are surface reconstruction by generating point cloud and mesh. Starting from the known exterior orientation and camera calibration parameters, a scene can be digitally reconstructed by means of automated dense image matching techniques. A powerful image matching algorithm in the software are be able to extract dense 3D point clouds with a sufficient resolution to describe the object’s surface. The generated point cloud is then triangulated to create a mesh.
DSM and Orthophoto Generation
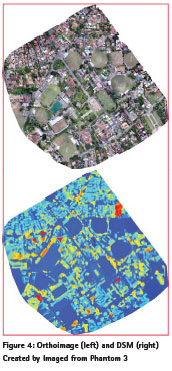
A Digital Surface Model or DSM is digital 3D representation of an area by elevation (Uysal, Toprak, & Polat, 2015). Pix4D allows to generate and visualize a digital surface model after generating the point cloud. A DSM represents a surface model as a regular grid of height values. Each pixel of the raster image is assigned to represent the elevation of the ground location at that pixel. DEM can be generated from a dense point cloud. Most accurate results are calculated based on dense point cloud data. Additionally, contour lines can be calculated for the model.
An orthoimage is generally a photo map which is geometrically corrected so that the scale is uniform. The most common application is aerial photographic survey measurements, but it may be also useful when a detailed view of the object is required. Orthoimages can be directly used for 2D measurements for calculating distances, areas and be used in Geographic Information Systems. It is generally a photo map which is geometrically corrected so that the scale is uniform. Pix4D allows to project the orthomosaic onto desired coordinate system of the user. The processing for final orthoimages and DSM was done by using ground control points and without ground control points.
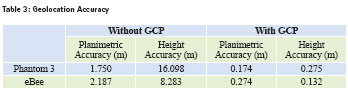
Geolocation Accuracy
The result of the 3D mapping with both drones achieved a remarkable sub meter level accuracy by processing with GCPs which fulfils most areal mapping requirements. Accuracy is computed by comparing the point locations of the products with ground truth data.
Even without using GCPs it was possible to obtain georeferenced areal maps only by using images with relevant exposure location obtained from the drone’s GNSS device. The accuracy is low as expected because GNSS unit of drones does not provide high level accuracy. When examining the height accuracy of the products obtained without taking account the GCPs, calculation of mean error and slandered deviation of error shows that there is a significant systematic error. It is suspected that the well-known problem of low accuracy in height observation with GNSS system has induced a shift for measurement of heights in both drones.
Comparison of Drones
The accuracy assessment of this study shows slightly better planimetric accuracy for Phantom 3 compared to the eBee when direct geo referencing is used. But Accuracy for the height is better in eBee. It can be clearly concluded that survey grade drones as well as inexpensive consumer grade drones provide remarkable accuracies in 3D aerial mapping with aid of state of art photogrammetric processing available today.
Compared with survey grade drones, the most significant advantage of consumer grade drones is the price. The price tag of Phantom 3 drone is 12 times lower than the eBee, which is very low in price compared to other survey grade drones also.
Another drawback of Sensefly eBee is the combination of a lightweight fixed wing design and a fixed camera mount. Fixed wing designs performs fair in most of windy conditions but this ultra-light platform had a tough time taking stable pictures in wind and turbulence. For this study near vertical photographs provides best geometric conditions but some pictures taken from eBee were tilted from vertical plane due to heavy wind. We had a successful mapping mission with a Dji Phantom 3 in this wind condition due to the gimbal stabilization of the camera.
When it comes to the simplicity, Phantom 3 has better advantages. Rotary wing drones platforms like Phantom 3 can takeoff and land vertically, thus no runway area is required, while fixed wing eBee requires open space to operate. Phantom 3’s simple design of the flight controller with plug and play functionality enables quick and easy operations. When the flight controller is combined with the flight management application, the data acquisition for aerial mapping becomes highly automated easy task while operation of eBee requires specific training. The UAV platform of Phantom is extremely user friendly and can be operated by an inexperienced operator in a short period of time. Prior knowledge about aerial mapping is essential for any drone operation to plan, acquire data and for successful processing.
The main advantage of eBees design is the safety. UAVs will always involve an element of risk, but the Sensefly eBee’s lightweight design minimizes those risks as effectively as possible. Flight time is also a prime reason for choosing fixed wing drones over a quadcopter. In aerial mapping eBee and other fixed wing drones has better endurance compared to rotary wing drones like phantom. It was necessary to map the area in four successive flights as change of battery is required. Fixed wing mapping drones consume less power so able to cover large area in single deploy.
Conclusion
This study presents an overview of using inexpensive drones for aerial mapping complementary to traditional photogrammetry as well as modern survey grade drones. It proves that inexpensive drone can provide high accurate and high resolution products with very high level of automation which suit many geomatics applications.
Drones are now received a lot of attention for consumer application since the costs are very much affordable. The costs are drastically reduced with the availability of low cost navigation and control devices as well as the imaging sensors with development of technology. Regardless of the low cost, these consumer grade drones provide platform capable enough to apply for accurate aerial mapping which was a costly and time consuming task a decade back. Drones can be used as mapping platform for number of critical scenarios as emergency response, reconnaissance surveying, rapid mapping etc. where immediate access to 3D geo information is necessary. Although conventional airborne remote sensing has still some advantages and the tremendous improvements of very high-resolution satellite imagery are closing the gap between airborne and satellite mapping (Zongijan, 2008). As consumer grade drones have less flying time, they are not suitable for large scale mapping tasks.
The accuracy of the final products which are orthoimage and DSM is ultimately dependent upon the characteristics of the imagery which depends on several factors as camera quality (geometric and radiometric quality / photographic resolution), platform stability, successful planning and execution of flight plan and terrain type. The modern photogrammetric processing combined with state of art computer vision algorithms (Hartley & Mundy, 1993) makes it possible to obtain mapping products even with cameras with high distortion as fish eye lens cameras. For this study, both cameras used for acquiring images are consumer grade cameras with low focal length. It is a known factor that low focal length cameras introduce significant geometric distortions and effects as rolling shutter but the processing software successfully model these distortions and able to produce accuracy level down to 17 cm. With advancement of today’s technology, the cameras as DSLR and Mirrorless, provide very high image quality but yet very much cheaper than traditional photogrammetric metric cameras. It is advisable use such type of camera for aerial surveying with drones for applications require higher level of accuracy.
Both flight planning and management software used for survey grade and consumer grade drones require minimum manual computations which provide the capability to user to focus only on onsite issues. The automated flight management software works without a flaw to design and execute the flight plan. As drones combines with GNSS and IMU devices, the flying operation is automated. This study shows that the desired survey area was successfully covered by both drones, covering the most of the study area with 5 or more photographs. It is great advantage in accurate processing to determine the 3D location.
References
Agisoft, L. (2013). Agisoft PhotoScan user manual. Professional edition, version 0.9. 0. AgiSoft LLC (Pub), Calgary, CA.
Bendea, H., Boccardo, P., Dequal, S., Giulio Tonolo, F., Marenchino, D., & Piras, M. (2008). Low cost UAV for postdisaster assessment. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 37(Part B), 1373–1379.
Dustin, M. C. (2015). Monitoring Parks with Inexpensive UAVs: Cost Benefits Analysis for Monitoring and Maintaining Parks Facilities. University of Southern California.
Hartley, R. I., & Mundy, J. L. (1993). Relationship between photogrammmetry and computer vision. Optical engineering and photonics in aerospace sensing (pp. 92–105). International Society for Optics and Photonics.
Nex, F., & Remondino, F. (2014). UAV for 3D mapping applications: a review. Applied Geomatics, 6(1), 1–15.
Snay, R. A., & Soler, T. (2008). Continuously operating reference station (CORS): history, applications, and future enhancements. Journal of Surveying Engineering, 134(4), 95–104.
Swinglet, S. (2015). Sensefly Swinglet.
Uysal, M., Toprak, A., & Polat, N. (2015). DEM generation with UAV Photogrammetry and accuracy analysis in Sahitler hill. Measurement, 73, 539–543.
Wolf, P. R., & Dewitt, B. A. (2000). Elements of Photogrammetry: with applications in GIS (Vol. 3). McGraw-Hill New York.
Zongijan, L. (2008). UAV for mapping– low altitude photogrammetric survey. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Vol. XXXVII. Part B, 1.
The paper was presented at Asian Conference on Remote Sensing (ACRS), Colombo, Sri Lank, 17-21 October, 2016











 (2 votes, average: 3.00 out of 5)
(2 votes, average: 3.00 out of 5)




Leave your response!