| Mapping | |
Mobile Mapping System in Reconstruction and Expansion of Highway in India
 |
|
India is at an infrastructure crossroads. As demand for infrastructure development has grown, the country’s tireless growth has raced ahead of its ability to develop and deliver the necessary number infrastructure projects.
In developing countries, an essential requirement for economic growth and sustainable development is the provision of efficient, reliable and affordable infrastructure services. A good road and highways network is a critical infrastructure requirement for economic development of a country .
The requirement of India’s highway expansion with an accuracy of less than 2cm, only the high-precision equipment HiScan-S mobile mapping system by Hi-Target can meet the need.
In this case study, we choose a highway in the east of Delhi having rugged road surface. Under the requirement of converting four lanes into six lanes, it is necessary to use the point cloud collected by HiScan-S to provide the cross section and the feature points and lines.
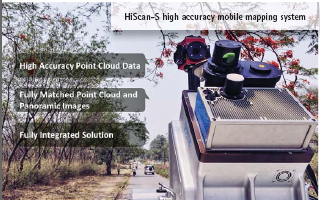

HiScan-S high accuracy mobile mapping system configs single Z+F 9012 scanner which scanning frequency up to 1,01 million points/s make the point cloud data high density. Seamlessly intergrated high performance IMU/GNSS make position high accuracy can reach 1-2cm that is enough to meet the needs of India highway reconstruction and expansion.
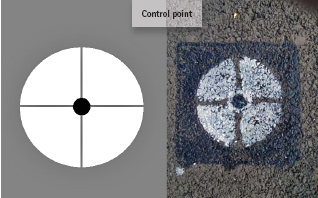
Before the data collection, we need to collect some control points. Every 600m interval a control point which measurement plane accuracy requirements of 3cm and elevation accuracy requirements of 2cm. The control points are used for correcting the elevation error and verify the accuracy.
We also use the prepared map data to do field survey, confirm the collection of road traffic conditions, the relationship between the collection line, and mark on the map, so that it will be a reasonable planning. Plan the base station position, POS alignment position, travel route in advance and try to ensure along the GNSS signal good area.
Please set the base station at the open area to ensure HiScan-S acquisition accuracy, The distance between HiScan-S and base station is less than 20km.
The steps of data collection are as following:
(1) Heading angle convergence The vehicle need to be accelerated, decelerated, turns (turns in multiple directions) and so on until the heading angle converges to 0 .1 °.
(2) POS data collection Aft er the acquisition of POS data, before the project data collection, according to the acquisition requirements to do the parameter settings, including the scanner parameters, camera trigger mode, camera exposure parameters.
(3) Project collection Aft er the POS alignment is completed and the parameters are appropriate, then start and complete the data acquisition. Then copy the data from HiScan-S to the laptop.
For HiScan-S mobile mapping solution, the data post-processing is very important and the steps are as following:
Raw Data Processing
The raw data collected by HiScan must be processed and can be used by other applications. The preprocessing of raw data includes POS solution and fusion solution.
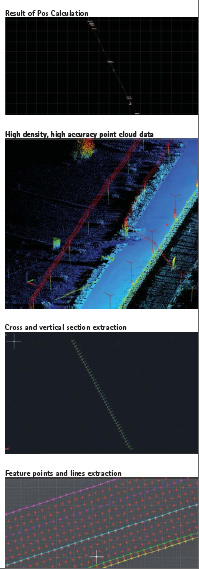
POS Calculation
POS solution is mainly based on base station data and POS data combination of computing, and output fusion software necessary high-precision position data.
In the POS solution, mainly including the base station data preprocessing and IE solution. The base station data preprocessing is to convert the original data of the base station into the corresponding format, and then the base station data and HiScan data are combined to obtain the high precision position data.
Fusion Calculation
When the mobil e mapping system records the measurement data of each sensor, it is necessary to register and combine the data according to the measurement model so that we can restore the 3D geometric spatial coordinates and attributes of the measured object. Fusion calculation is process the raw data which collected by HiScan-S and generate point cloud data for other series of software for follow-up processing.
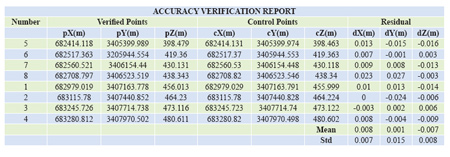
Accuracy Verification
After obtaining the point cloud data, it is necessary to verify the accuracy of the point. Select corresponding control points coordinates in the point cloud, and the accuracy verification report is obtained by comparing with the coordinates of the control point. For places where the accuracy does not meet the requirements of the place with the control point for POS correction.
POS Data Correction
Set the known control points on the motion trajectory of the HiScan-S to adjust the coordinates of the other scanning points to improve the accuracy of mobile mapping system. In the subsequent data processing, the coordinates of these control points into the point cloud coordinate calculation of the adjustment process, in order to enhance the mobile mapping system accuracy, so that it can fully meet the requirements of the highway expansion of measurement accuracy.
After ensuring the point cloud data meet the accuracy requirements,use customized software for the road expansion to extract the basic data of highway expansion automaticly or semi-automaticly, including road cross, vertical section extraction and feature points and lines.
Customers give a high rating in our operating software, post-data processing and data accuracy, because our operate software is easy to implement, data post-processing quickly and accurately, get the point cloud accuracy of less than 2cm which meet the requirements of highway expansion.










 (No Ratings Yet)
(No Ratings Yet)





Leave your response!