| Navigation | |
Resilient PNT – Making way through rough waters
The Accessibility for Shipping, Efficiency Advantages and Sustainability (ACCSEAS) project will be considering several means of obtaining alternative PNT information |
 |
|
 |
|
 |
|
The International Maritime Organisation (IMO) is developing e-Navigation as the future approach to marine navigation in order to enhance maritime safety. As such, the IMO state that positioning systems for e-Navigation “should be resilient …. robust, reliable and dependable. Requirements for redundancy, particularly in relation to position fixing systems should be considered” [1].
GPS has become the primary source of positioning for mariners; but no Global Navigation Satellite System (GNSS) alone can provide resilient Position, Navigation and Timing (PNT). GNSS, including GPS, GLONASS, BeiDou, QZSS and Galileo, is vulnerable to deliberate, accidental or natural radio interference. Despite these weaknesses, GPS has become a crucial element not only of maritime navigation, but also of critical national infrastructure, and is often used without any backup being provided. A complementary system, compatible with GNSS but independent from it, is essential to achieving the resilient PNT required for e-Navigation; it is also essential for supporting a wide range of national and international critical infrastructure systems. The Accessibility for Shipping, Efficiency Advantages and Sustainability (ACCSEAS) project will consider resilient PNT as part of its overall aim of developing potential e-Navigation services that will enhance maritime safety and efficiency within the North Sea Region (NSR). The project will develop an e-Navigation test bed within the NSR which will be used to demonstrate the potential e-Navigation services, developed by the project. The project is being completed by a collaboration of 11 partners from across the NSR, made up of service providers, industry and academia [2].
The need for resilient PNT
The ACCSEAS project is investigating the future navigation issues which are due to affect shipping in the NSR and has highlighted the fact that shipping density is set to increase with bigger, faster vessels, leading to reduced manoeuvrability. The navigable area of the North Sea will reduce in size due to the growth in offshore installations, such as wind farms and oil and gas platforms. As a result, the risk of an incident or accident occurring will increase, particularly at pinch points such as approaches to major ports and constrictions, such as Rotterdam and Dover, and inland waterways like the Kiel Canal.
Within this environment, the project recognizes that GPS has become the normal method used for maritime PNT, primarily because it is freely available and usually provides excellent performance. As a result, the number of GPS receivers installed on a ship’s bridge is increasing and, depending on the nature of the vessel operations, GPS data can be fed to a large number of the bridge systems, including some which may be unexpected, for example the vessel’s radar, gyrocompass and clocks.
In addition to ordinary positioning and navigation functionality, another key component affected is the Automatic Identification System (AIS). While AIS was developed to provide information from shipto- ship and ship-to-shore, it is likely to form a vital part of e-Navigation data exchange, in conjunction with broadband Internet. It is also noted that many satellite broadband systems use GPS to align a high gain antenna towards a geostationary satellite.
It is well known that GPS, and GNSS in the broader sense, is vulnerable to system failures as well as intentional and unintentional interference [3]. An example of natural interference was observed in 2006 when a radio burst from the Sun affected GPS reception over the entire sunlit side of the Earth [4]. Such solar events occur with very little advanced warning, if any, and can affect large areas. As such, suitable mitigation is required; mitigation that can be used automatically and seamlessly should GNSS suddenly become unavailable.
Inference can also be caused through the use of GPS signal jammers which can prevent a receiver from maintaining lock on GPS satellites. Jamming does occur and the fear is that it is on the increase, whether due to accidental use, such as the case of a military jamming unit being accidentally left switched on in San Diego harbour in 2007; or through the indirect effects of intentional use, as in the case of GPS jamming observed at Newark airport in 2010 [5]. The latter example highlights the unintentional consequences of using such systems as the user did not intend to affect the airport systems, but reportedly used the jammer to prevent their movements from being tracked.
A more significant intentional act of jamming occurred in 2012, when North Korea jammed GPS over large areas of the Republic of Korea, affecting military and civilian users alike. There are reports of various aircraft and ships altering course in order to maintain safety [6], this would not have been necessary if resilient PNT options were available. These problems are not limited to GPS; by design, signals broadcast from GNSS satellites are low power and with the use of a common frequency band to aid interoperability, it is easier to affect more than one GNSS with a single jammer. In this case, ease of interoperability also leads to joint vulnerability.
Options for resilient PNT
In order to achieve resilient PNT, other sources of PNT information are required in addition to the primary source, which is recognised as GNSS. Any additional system needs to have dissimilar failure modes to GNSS otherwise it too will be affected by the same vulnerabilities. It is not a case of simply adding more receivers or using different constellations providing signals in the same band of frequencies, as they can all fail together. Similarly, adding more physical Aids-to-Navigation may enable mariners to know their relative location, but it would not be sufficient to maintain the many different systems, and potential e-Navigation services, which require an electronic position.
One of the aims of the ACCSEAS project is to consider the question of which system, or systems, can be used to provide resilient PNT. When considering candidate systems one must keep in mind their availability and failure modes, what level of performance can be provided, how the resulting PNT information can be integrated and, of course, cost.
The General Lighthouse Authorities of the United Kingdom and Ireland (GLA) studied a number of options for resilient PNT; from the use of dissimilar technologies such as inertial systems, the use of alternative radionavigation systems and whether GNSS receivers and systems can be “hardened” to make them less susceptible to vulnerabilities. The study concluded that inertial technology is relatively immature for maritime applications and as such, the costs are prohibitive and also, while GNSS hardening options exist, they are normally reserved for military use. As such, the ACCSEAS project is considering using alternative radionavigation systems; including:
• R-mode
• eLoran
• Absolute radar positioning
R-Mode, or Ranging Mode, is obtained by adding a navigation ranging signal to the signal broadcast by marine radiobeacon DGPS stations and AIS base stations.
Radiobeacon DGPS operates in the Medium Frequency band (around 300kHz), where the signal propagates as a groundwave over the surface of the earth from a transmitter to the mariners’ receivers. AIS operates in the VHF band (approximately 160MHz), and propagates along a line of sight path from the transmitter to the receiver. By receiving a ranging signal from three or more stations, an appropriate receiver could then determine the mariner’s position independently from GNSS. Each ranging signal requires synchronising to UTC, or other common system time, a suitable signal structure for tracking purposes and propagation effects need to be taken into account. R-mode is not currently available and is being developed as part of the ACCSEAS project.
eLoran is a system of low frequency broadcasts, from terrestrial stations that provide PNT information, independent from and complementary to GNSS. eLoran receivers calculate the distance the signals propagate from the transmitters to the users’ receivers via groundwaves propagating over the surface of the earth. This calculation makes an assumption that the world is made entirely of sea water. But there are additional propagation delays due to the signal travelling more slowly over land, these are known as Additional Secondary Factors (ASF). They are measured and published for each service area. ASFs are measured once and for all, published, and then stored within a user’s receiver; but the actual values may change slightly due to short term weather, and longer term seasonal effects. A Differential-Loran reference station, installed near to the service area, measures these small changes and sends differential-Loran correction data to the eLoran transmitting station for broadcast to the mariner over the eLoran signal itself; on the Loran Data Channel.
Radar is traditionally a relative positioning system, used to determine where the ship is relative to structures around it. However, it has been demonstrated that it is possible to get ranging information using a coastal network of active radar transponders with New Technology (NT) radar [7]. Such transponders would respond to radar illumination by transmitting their location or ID back to the vessel’s radar. By calculating the range from a series of transponders at known locations an absolute position can be calculated. The ACCSEAS project plans to investigate this option further, with a trial planned to take place within the next few months.
System integration
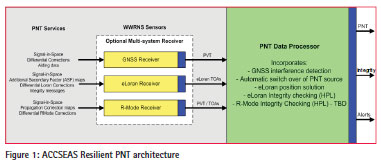
The selected PNT systems will need to be integrated into a resilient PNT system that can monitor the performance of each of the different solutions and provide a resilient PNT output to the bridge systems. The ACCSEAS project is investigating how this can be achieved and has developed a prototype Resilient PNT Data Processor (RPDP). This module monitors the availability of the different PNT sources and selects which system to use based on a number of criteria. The architecture of the RPDP is shown in Figure 1.
The RPDP runs on a lap-top computer and takes input from the different PNT sources, currently GPS is the primary source and eLoran is the secondary source; in the future this may be expanded to include R-mode.
The RPDP works by building a model of the expected signal performance from the GPS satellites in view. Having built this model, any significant changes to the expected performance, taking into account the movement of the ship, will then be flagged. If the performance crosses a particular threshold then the RPDP swaps the output from the primary PNT source (GPS) to the secondary PNT source (eLoran). The RPDP is also able to monitor the performance of eLoran to ensure the data is fit for purpose.
The decision was made not to implement any multi-system integration, but to keep the GPS and eLoran data separate and have a binary decision of which to use as the ship’s position data. Deeper, multi-system integration has several benefits, including greater accuracy; improved availability of the solution; the ability to calibrate crosssystem biases; and increased coverage or better HDOP by combining signals from several systems. However, for safety-of-life navigation where a high level of integrity is required, any multi-system integration or calibration process risks introducing faults from one system into another. Likewise the use of Kalman Filtering or any other type of multi-epoch smoothing propagates Integrity Risk from one epoch to the next. Both techniques risk ‘poisoning the well’ if severe integrity hazards, such as jamming occur and go undetected. As a general rule, for high-Integrity applications cross-system calibration and cascaded filtering should be avoided whenever possible to maintain the level of systemseparation needed to ‘quarantine’ the Integrity Risk [8]. Hence the systems are monitored and analyzed separately.
Demonstrating the benefit of resilient PNT
The GLA conducted a series of resilient PNT demonstrations in February and March 2013, as part of the ACCSEAS project, with the aim to test the RPDP and to promote the need for resilient PNT. Demonstrations were held on board a GLA buoy tender, THV Galatea, where the RPDP was installed on the bridge.
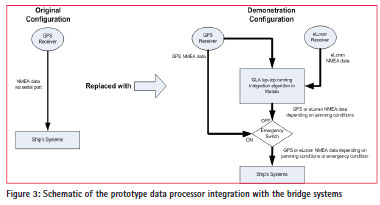
In order to integrate the prototype into the bridge of the Galatea it was necessary to determine the extent to which the different ship’s systems were dependent on GPS and from where that GPS data originated. It was determined that the majority of equipment is fed GPS data from two receivers with NMEA data splitters used to feed this GPS data to the different bridge systems. For the demonstrations, one of the GPS inputs was replaced with the output from the RPDP (Figure 3) So that systems such as the AIS, ECDIS, gyro and radar were subsequently supplied with resilient PNT data.
The UK Ministry of Defence was contracted, by the GLA, to operate an L1 GPS jammer which was installed aboard the THV Galatea. The jamming power was set so that it would only affect the Galatea. The vessel was constrained to operate in an approved experimental area off the coast of Harwich on the east coast of England, where GPS jamming had been licensed for the duration of the trials
The demonstrations followed the scenario that the vessel was unwittingly steaming towards a source of GPS interference, either radiating from another vessel or from a nearby coastal headland. To simulate this, the power of the jammer installed on the vessel was slowly increased until systems failed. In order to demonstrate the benefit of a resilient PNT system the scenario was repeated twice, first without Fig ure 2: Screen image of the ACCSEAS Prototype PNT Data Processor the RPDP active and then with the RPDP enabled. During the demonstrations the vessel remained within the jamming area, travelling slowly, and used the radar to maintain situational awareness. During the first run, with the RPDP disabled, the audience observed the many different bridge systems enter an alarm state, reporting the loss of position or timing information, as demonstrated during previous GLA jamming trials [9]. Alarms sounded from the various systems and their repeaters around the bridge. If not expected, these could have caused confusion to the crew as they attempted to understand the causes of the alarms and silence them. Once the effect on a normal bridge had been established, the jamming signal was stopped and the vessel systems were allowed to recover. When the systems had returned to their normal operational condition, the RPDP was enabled and the scenario repeated.
During this second run the RPDP monitored the performance of GPS and identified the presence of jamming at a level below that which caused the ship’s bridge systems to alarm, enabling the PNT source to be swapped to eLoran before the effect of the jamming could raise any alarms on the bridge. This resulted in the quiet, seamless and automatic transfer from one source of PNT to another, all with no fuss. For the first time, bridge systems were operating on a resilient PNT solution; navigating using eLoran position data in place of GPS when GPS was lost. Also, for the first time, the vessel was able to report its position over AIS using eLoran derived PNT information.
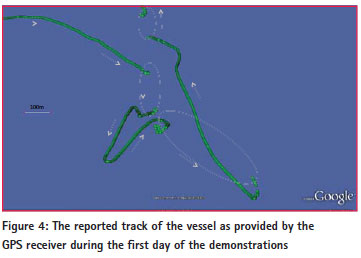
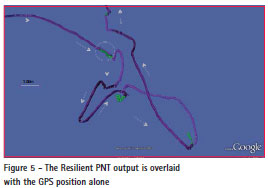
Following the demonstrations, data recorded from the various GPS receivers were processed, including the output of the RPDP. Figure 4 shows the GPS position output from one of the demonstrations. The ship entered the jamming zone from the north-west and sailed around the region. The green trace shows the reported GPS position. Where GPS was lost due to jamming, there are gaps, highlighted by the red ovals. The plot also shows examples of how the GPS reported position can wander. This tends to occur when the jamming signal strength is relatively weak and tends to happen at the beginning and end of the various segments, when the jamming power is increased and decreased. This wander is Hazardously Misleading Information (HMI) and the mariner would prefer to have NO GPS at all rather than GPS that gives incorrect positions. Figure 5 shows the RPDP output overlaid in purple on the GPS output. When GPS is available the processor outputs GPS derived positions and the two traces overlap exactly. Where there are gaps in GPS due to jamming, eLoran derived positions are output instead and fill the gaps. However on closer inspection, it’s possible to see eLoran taking over before GPS is lost entirely (the red circle). The RPDP has identified that something is wrong with GPS and switches to eLoran before the GPS data is output, thus avoiding the presentation of Hazardously Misleading Information to the mariner. Whilst outputting eLoran data, the RPDP continues to monitor the performance of GPS and once it is deemed usable again, the output is swapped back to GPS.
Conclusions
This work has shown that the ACCSEAS project has not only developed a prototype resilient PNT solution, but that it has been successfully tested and demonstrated under live conditions on a typical ship’s bridge.
The benefits of such a system were clearly demonstrated since, when GPS was lost because of jamming and the PNT data processor unit was enabled, the ship’s crew were able to seamlessly continue to navigate safely and efficiently and were not distracted by the many different alarms that would otherwise have sounded. ACCSEAS will be considering several means of obtaining alternative PNT information as the project progresses. For these demonstrations eLoran was used to provide the additional, complementary PNT information, demonstrating that it is available to use today.
The GLA, and the ACCSEAS project, continue to support the use of multiple PNT sources in order to keep the mariner safe and avoid the presentation of Hazardously Misleading Information.
Acknowledgements
The authors acknowledge that this work was conducted as part of the ACCSEAS project, which is part funded by the INTERREG IVB North Sea Region programme, and would like to thank the project participants along with the crew of THV Galatea for their assistance and professionalism when conducting these trials.
ACCSEAS Project partners
ACCSEAS partners are General Lighthouse Authorities, UK & Ireland; Chalmers University of Technology (Sweden); Danish Maritime Authority; Federal Waterways & Shipping Administration (Germany); Rijkwaterstaat, Minesterie Infrastructuur en Millieu (The Netherlands); Swedish Maritime Administration; Norwegian Coastal Administration; SSPA Sweden AB; Flensburg University of Applied Science (Germany); NHL Hogeschool, Leeuwarden, Maritiem Instituut Willem Barentsz (The Netherlands) and World Maritime University (Sweden)
References
[1] International Maritime Organization, Annex 20 on “Strategy for the Development and Implementation of E-Navigation”, part of the “Report of the Maritime Safety Committee on its Eighty- Fifth Session”, January 2009.
[2] www.accseas.eu
[3] Grant et al, “Understanding GNSS availability and how it impacts maritime safety”, ION ITM Conference, 2011.
[4] Cerruti et al, “Effect of intense December 2006 solar radio burst on GPS receivers”, Space Weather Journal, Volume 6, 2008.
[5] Warburton, J., and C. Tedeschi, “GPS Privacy Jammers and RFI at Newark: Navigation Team AJP- 652 Results,” 12th International GBAS Working Group Meeting (I-GWG-12), Atlantic City, New Jersey, November 17, 2011
[6] http://www.bbc.co.uk/news/ world-asia-17922021
[7] http://www.efficiensea.org/files/ enavigation_underway_2012_ conference_report.pdf
[8] Groves, Paul, D., ‘Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems’, Artech House, 2008.
[9] Grant, A., & Williams, P., “The potential effects of GPS jamming on Marine navigation”, Royal Institute of Navigation Conference, NAV10, London, 2010.
This paper was presented at the RIN GNSS Vulnerabilities conference at Baska, Croatia during 18 – 20 April, 2013.











 (4 votes, average: 4.75 out of 5)
(4 votes, average: 4.75 out of 5)



