| GNSS | |
Recent activity of international standardization for highaccuracy GNSS correction service
Recently, Compact SSR, which is a highly efficient open format for PPP/PPP-RTK was proposed and applied for QZSS CLAS. It is also planned to be applied as the baseline of Galileo HAS |
 |
|
On emerging wide-area high-accuracy open PPP/PPP-RTK correction service and low-cost multi-frequency GNSS receivers, the centimeter-level high-accuracy positioning will be widely used in the field of agriculture, construction, drone, and automobile. For such applications, the interoperability between different correction services and receivers should be maintained to minimize the production and operational cost.
In this article, the recent activities for international standardization of PPP/ PPP-RTK will be introduced. The international standardization of format has been conducted in RTCM SC-104, published as RTCM SSR. However, it doesn’t support PPP-AR/PPP-RTK yet, and it is not sufficiently effective for satellite-based narrow band correction service. Recently, Compact SSR, which is a highly efficient open format for PPP/ PPP-RTK was proposed and applied for QZSS CLAS. It is also planned to be applied as the baseline of Galileo HAS. The high-accuracy GNSS positioning is also demanded in mobile communication for LTE/5G, 3GPP is also working to define the PPP-RTK standard based on Compact SSR. The other useful information such as integrity, the authentication of correction data, the grid definition, the precise coordinate transformation, and the service maintenance could also be standardized.
Introduction
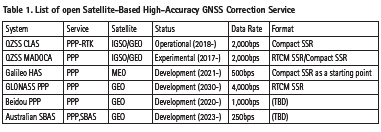
Recently, the high accuracy GNSS correction services, as well as the low-cost high-performance GNSS receivers, are available in the GNSS market. In Japan, Centimeter-Level-Correction Service (CLAS) [1,2], the satellite-based open PPP-RTK correction service is operational since November 2018. QZSS MADOCA is also available as an experimental open PPP service for Asia and Oceania region. The initial phase of the operational PPP service of Galileo HAS is planned to be started in 2021. The other satellite-based PPP service, GLONASS PPP, Beidou PPP, and Australian SBAS will also available in 202x as shown in Table 1 [19]. The high-accuracy GNSS positioning would be commodity in the middle of 202x in wide range of markets such as agriculture, drone, and automobile. For the highaccuracy GNSS application, the inter-operability between service providers and receivers are highly important. In this article, the recent activity of international standardization for highaccuracy GNSS positioning is introduced.
High accuracy GNSS positioning
The structure of the satellite-based highaccuracy correction service is shown in Fig.1. The GNSS range measurements collected in the GNSS continuously operating reference stations (CORS). PPP/PPP-RTK correction data is generated at the ground system using the collected GNSS range measurements, it is broadcasted from the satellite.
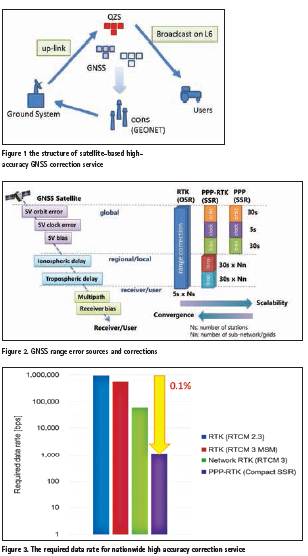
The GNSS range measurement between satellite and receiver includes a couple of error sources. The errors can be categorized into three major types, the global (or common) error, the regional (or local) error, and the receiver (or user) error. The global error includes satellite orbit error, clock error, and signal bias. The regional error includes atmospheric delay such as ionospheric delay and tropospheric delay. The receiver error includes the multipath, the receiver noise, and the receiver signal bias. The correction service providers provide the correction data for global and regional errors, the receiver errors need to be compensated by the user receivers. For the conventional RTK based on observation space representation (OSR), the range correction is calculated by subtracting the geometric range from the measurement range. For PPP/PPP-RTK based on the state-space representation (SSR), the states representing each error sources are estimated and sent to the user. The major drawback of conventional RTK is scalability, the correction data can be applied only if the distance from the neighboring station is less than 10- 20km. On the other hand, SSR based PPP/ PPP-RTK correction service broadcasts the estimated states such as satellite orbit and clock correction to the user. The regional correction has the location dependency, broadcasted only for the specific region in PPP-RTK. The update interval of states can be optimized based on the dynamics of each error source to minimize the throughput. In QZS CLAS, the update interval is 5sec for satellite clock correction and 30sec for other states.
For PPP-RTK correction service, the states including global and regional errors are broadcasted for the users, whereas, only satellite terms such as orbit, clock and signal bias are broadcasted in PPP correction service. The correction data for PPP has no location dependency, the global service can be realized with the narrow-band satellite data link less than 500bps. The major limitation of PPP is the slow convergence time typically about 30 minutes. PPP-RTK needs the dense CORS network to estimate the atmospheric error, it can achieve RTK-like fast convergence time less than 1 minute.
Figure 3 shows an example of the required data rate for nation-wide high-accuracy correction service for the service area of 40,000km2, 14 satellites, 3 signals per satellite. For conventional RTK, the required total data rate is about 1Mbps, whereas, the required data rate for PPPRTK is about 1,000bps, it only consumes 0.1% of the conventional technology.
Standardization of format
Standardization in RTCM
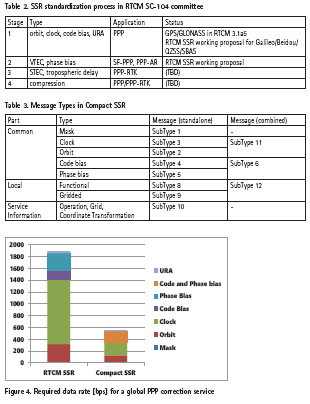
The transmission format of high-accuracy GNSS correction services such RTK and network RTK has been standardized in RTCM SC-104 committee, almost all commercially available GNSS receivers are supporting RTCM 2.3/3.x format. For the SSR based correction, the standardization activity started in 2007 at RTCM SSR working-group, the process is defined as four stages shown in Table 2. The first three stages are mainly to define the contents of PPP, PPP-AR, and PPP-RTK respectively, and the fourth stage is to define the effective format by applying the compression technology.
For stage 1, PPP including clock, orbit, and code-bias correction was standardized in February 2011 for GPS and GLONASS, it was included in RTCM 3.1 with Amendments 5. However, stage 2 is still on the proposal phase in the RTCM SSR working group, the timeline to finalize the effective format in stage 4 for PPP/PPPRTK is unclear.
Open standard proposal
Compact SSR, a highly effective open standard for PPP/PPP-RTK was proposed in September 2015.
It is defined as RTCM 3 proprietary format (Message Type 4073), it defines several message types as shown Table 3. The common part defines the satellitebased error correction such as clock, orbit, code bias, and phase bias. The local part defines the atmospheric correction including STEC and tropospheric delay. There are two types of format, standalone and combined are defined. The combined message includes the multiple types of correction such as clock and orbit, it is more effective than the standalone format. The mask message is to define the group of satellites and signals effectively. The service information is a generic format to broadcast the slowly changing or constant information such as the service operation and maintenance, grid definition, coordinate transformation parameters.
Compact SSR is mainly designed for the satellite-based narrow-band correction service, it is far more effective than RTCM SSR. The required data rate for a global PPP correction service is shown in Figure 4. In this example, 69 satellites including 32 GPS, 30 Galileo and 7 QZS with 3 signals per satellite are supported, the update interval is 5 sec for the clock, 30sec for others. The required data rate for Compact SSR is less than 600bps, it is more than 70% effective than RTCM SSR.
Compact SSR is supporting multi-GNSS including GPS, GLONASS, Galileo, Beidou, QZS, and SBAS. The integrity information to estimate the protection level on the GNSS receiver is also supported.
The other open format is also proposed. Sapcorda proposed an open standard, SAPA based on Compact SSR. It has the almost same effectiveness as Compact SSR with additional information. Geo++ also proposed a highly effective format, SSRZ. However, both format is still under development, it is not yet openly available.
Standardization in mobile communication
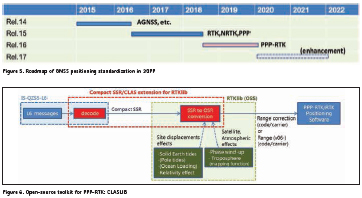
In the mobile communication market in LTE/5G, the high-accuracy GNSS positioning service is highly demanded. Recently, the major mobile carriers in Japan, Softbank, and NTT Docomo announced the launch of the nation-wide RTK-GNSS correction service using their LTE/5G network. Similar services would be available in other countries. The industrial standardization group in mobile communication, 3GPP is working to define high accuracy GNSS correction service base on the existing open standard. Figure 5 shows the roadmap of GNSS positioning standardization in 3GPP. The conventional GNSS technologies such as RTK and network-RTK are already standardized based on RTCM 3 standard in Release 15. PPP is also standardized in Release 15 based on RTCM SSR. For PPPRTK, it is not standardized yet as RTCM standard, it is working to standardize based on the existing open standard, it is decided to define the specification for PPP-RTK based on Compact SSR, it is plan to be included in Release 16 which will be released on February 2020.
Reference implementation
For the implementation of PPP-RTK positioning software, the conversion of correction data from the SSR domain into the OSR domain should be conducted. To minimize the development effort by the receive manufacturers and to maintain the interoperability for different GNSS receivers, the reference implementation of SSR-to-OSR converter is highly demanded.
For QZSS CLAS, an open-source toolkit for PPP-RTK named CLASLIB is developed, and distributed from QSS Web site (https://www.qzss.go.jp/). Figure 6 shows the structure of CLASLIB, it is implemented as an extension of RTKLIB, an open-source toolkit for RTK. CLASLIB includes the Compact SSR to OSR converter with documents and test datasets. Although CLASLIB is developed for QZSS CLAS, Compact SSR is generically defined for PPP-RTK service, it could be applied for other PPP-RTK correction services with minor updates.
Service information
Definition of Service Information
The format for SSR-based high accuracy service is mainly designed to send the correction data for PPP/PPP-RTK. There is also demand to receive other useful information such as operational information in the same data stream. In Compact SSR specification, the service information message (SubType 10) is defined to send the slowly changing or constant information as shown in Table 4. The contents of service information are divided into multiple parts of SubType 10 messages, it is concatenated and decoded in the user receivers.
Grid Definition Information
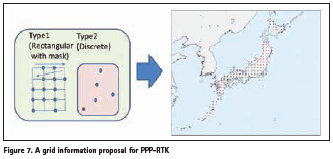
For PPP-RTK positioning, the atmospheric correction is provided on the grid located in the service area, the user receiver calculates the atmospheric correction at the user position by interpolating the correction data of surrounding grids. In QZSS CLAS, the 212 grids are defined for their nationwide PPP-RTK service for Japan as shown in the right part of Figure 7.
In the current service of QZSS CLAS, the coordinates of grid points are defined and documented in the ICD, IS-QZSS-L6. However, the grid definition is demanded to be included in the stream to make better consistency. A highly effective grid information message is proposed for 3GPP by ESA, u-blox and Mitsubishi Electric. It includes the two types of grid definition as shown in left part of Figure 6. Type 1 is to define the equally spaced grids, it also includes the mask information to represent the valid grid point in the rectangular area. Type 2 is to define the randomly located grids, it is normally located on the physical reference stations. If the proposed message implemented as Compact SSR SubType 10 is applied for QZSS CLAS, the coordinates of total 212 grids can be transmitted within 4 minutes by consuming 6bps of the stream.
Coordinate Transformation Information
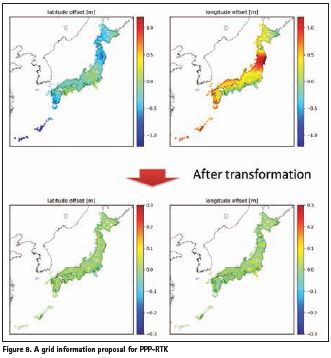
For a robotic application such as automatic driving, the precise location on the static datum used in digital map should be required. However, the position derived from PPP or PPP-RTK correction service is based on the dynamic datum of current epoch. In Japan, the difference between the national static datum JGD2011 and the dynamic datum of current epoch is more than 1.5m on the worst case, it is changing up-to 10cm per year. The upper part of Figure 8 shows the latitude and longitude offset between two geodetic datum. The offset between two geodetic datum is highly nonlinear because of the earthquakes and the crustal deformation, it cannot be represented in the simple coordinate transformation parameters. The Geospatial Information Authority (GSI) in Japan is defining the highly accurate offset database with 5km resolution to transform between JGD2011 and the current datum, it is available on their web site. However, the GNSS receivers without internet connection cannot easily access the database, and the size of database is about 760kB in text format, it is so huge to send in the narrow-band data stream.
Recently, a highly efficient coordinate transformation information is defined for the service information message of Compact SSR. By applying the similar compression technique as atmospheric correction, the size of coordinate transformation parameters can be reduced considerably, the message can be sent as Compact SSR SubType 10 messages within 15minutes by consuming 6bps of stream. The bottom part of Figure 7 shows the offset after correction of offset, the expected accuracy is about 3cm (rms).
Interoperability and future direction
Interoperability between services and receivers
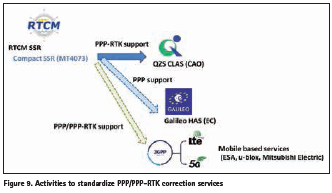
As shown in Table 1, multiple highaccuracy GNSS correction services will be available in this decade, the interoperability between different services will be important. Figure 9 shows the recent activities to standardize PPP and PPP-RTK correction services based on RTCM SSR and Compact SSR. Galileo HAS plan to use an open standard for their PPP correction service, Compact SSR is selected as a starting point. European Commission (EC) and Japan Cabinet of Office (CAO) started the discussion to maintain the interoperability between Galileo HAS and QZSS CLAS. GLONASS PPP proposed to use RTCM SSR for its PPP service. Australian SBAS is also planning to use open format for its PPP correction service. As mentioned in previous section, 3GPP is working to standardize PPP/PPP-RTK format based on RTCM-SSR/Compact SSR.
The usage of open-format for satellitebased or ground-based open correction services could be highly beneficial for the high-accuracy GNSS market by reducing the development and evaluation cost of GNSS receivers supporting the multiple satellite-based or ground-based correction services.
Integrity and Security
Currently, the high accuracy positioning is mainly applied for the survey market, it is expected to be applied for the high volume market such as automotive, agriculture, drone, construction. For safety-critical robotics applications such as automatic driving, the integrity of navigation system is highly important. For aviation application, the integrity requirement is defined as 10-7/h in SBAS, the open standard is discussed in RTCM SC-134 for the other applications. Compact SSR messages include the quality information of the correction data, it can be used to calculate the protection level on the GNSS receiver. The integrity information needs to be standardized for high-accuracy positioning.
There is a concern about cyber-security attacks such as spoofing. Recently, GNSS service providers such as GPS and Galileo proposed the navigation message authentication or the navigation signal authentication for their services. The authentication of correction service is also proposed for SBAS. Recently, the authentication message for PPP/ PPP-RTK correction service is proposed as an extension of Compact SSR. The interoperability of GNSS authentication service is also important to minimize the cost of implementation on GNSS receivers
Conclusion
In this article, the recent activities of international standardization for highaccuracy GNSS correction services are introduced. The high-accuracy GNSS positioning will be widely accepted in a wide range of applications for next decade, the inter-operability of different services and receivers is highly important. The industrial standardization group such as RTCM SC-104 committee and 3GPP is working to standardized to define the open-standard for high-accuracy GNSS positioning. The inter-system inter-operability is also discussed in the International Committee on Global Navigation Satellite Systems (ICG).
References
1. Cabinet Office, “Quasi-Zenith Satellite System Interface Specification, Centimeter Level Augmentation Service,” ISQZSS- L6-001, 5 November 2018.
2. Cabinet Office, “Quasi-Zenith Satellite System Performance Standard,” PS-QZSS-001, 5 November 2018.
3. RTCM SC-104, “Differential GNSS (Global Navigation Satellite Systems) Services – Version 3,” RTCM Standard 10403.3, Octoer 2016.
4. Hirokawa, R., Sato, Y., Fujita, S., and Miya, M., “Compact SSR Message with Integrity Information for Satellite-based PPP-RTK Service,” Proceedings of 29th International Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2016), Portland, OR, September 2016, pp. 3372-3376.
5. RTCM Paper 115-2018-SC104- 1071, “Specification of Compact SSR Message for Satellite- Based Augmentation Service,” Mitsubishi Electric Corporation, RTCM SC-104 meeting, Frankfurt, Germany, October 2018.
6. Motooka, N., Hirokawa,R. , Nakakuki, K., Fujita, S., Miya, M., Sato, Y. ,”CLASLIB: An Open-source Toolkit for Low-Cost High-precision PPP-RTK Positioning,” Proceedings of 32th International Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, Florida, September 2019.
7. Pasynkov, V., “Status and prospects of the Russian PPP System for highprecision determination of Navigation and Ephemeris-time Information,” the Workshop on the Applications of Global Navigation Satellite Systems, Suva, Fiji, June 2019.
8. Blonski, D., “Galileo Status and High Accuracy,” the Workshop on the Applications of Global Navigation Satellite Systems, Suva, Fiji, June 2019.
9. Reynolds, S., “The Australian SBAS Program: Progress and Motivation for a PPP Service,” the Workshop on the Applications of Global Navigation Satellite Systems, Suva, Fiji, June 2019.
10. Tu, R., “Development of BDS and Stude of PPP Timing,” the Workshop on the Applications of Global Navigation Satellite Systems, Suva, Fiji, June 2019.
11. Vana, S., Aggrey, J., Bisnath, S., Leandro, R., Urquhart, L., and Gonzalez, P. , “Analysis of GNSS Correction Data Standards for the Automotive Market,” NAVIGATION. 2019;66 (3, Autumn):577-592.
12. FernándezˉHernández I, Rijmen V, SecoˉGranados G, Simón J, Rodríguez I, Calle JD. “A navigation message authentication proposal for the Galileo Open Service,” NAVIGATION. 2016;63(1, Spring):85-102.
13. FernándezˉHernández I, Châtre E, Dalla Chiara A, et al. “Impact analysis of SBAS authentication,” NAVIGATION.2018;65 (3, Winter):517–532.
14. Anderson, Jon M., Carroll, Katherine L., DeVilbiss, Nathan P., Gillis, James T., Hinks, Joanna C., O’Hanlon, Brady W., Rushanan, Joseph J., Scott, Logan, Yazdi, Renee A., “Chips- Message Robust Authentication (Chimera) for GPS Civilian Signals,” Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, Oregon, September 2017, pp. 2388-2416.
15. Hirokawa,R. , Fujita, S.,”A Message Authentication Proposal for Satellite-Based Nationwide PPP-RTK Correction Service,” Proceedings of 32th International Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, Florida, September 2019.
The paper was presented at the Workshop on the Applications of Global Navigation Satellite Systems, Suva, Fiji, June 2019.











 (3 votes, average: 4.00 out of 5)
(3 votes, average: 4.00 out of 5)




Leave your response!