| Surveying | |
Evaluation of KSACORSbased network GNSS-INS integrated system for Saudi coastal hydrographic surveys
This paper evaluated a real-time KSACORS-based NRTK GNSS-INS integrated solution and a post-processed KSACORS-based NPPK GNSS-INS integrated solution |
 |
|
Abstract
Multibeam echosounding technique is used to provide sea-floor mapping with relatively high-quality level and requires an accurate positioning and attitude system. Integration of Global Navigation Satellite System (GNSS) and inertial navigation system (INS) is widely used for positioning and attitude control and is carried out using an inertial unit integrated with GNSS solution to provide the required accuracy. Recently, the Kingdom of Saudi Arabia Continuously Operating Reference Station (KSACORS) network GNSS stations were developed by the Saudi Geodetic Commission for Survey (GCS) to maintain an accurate GNSS positioning solution for governmental and private sectors within Saudi Arabia coverage area. This paper investigates the performance of the KSACORSbased network GNSS-INS integration for Saudi coastal hydrographic surveys and also investigates whether the archived accuracy fulfill International Hydrographic Organization (IHO) standards for all survey orders. To meet this objective, the KSACORS-based network real-timekinematic (NRTK) and network postprocessed kinematic (NPPK) solutions are integrated with INS solution. The implementa-tion of the KSACORS-based NRTK and NPPK GNSS-INS integration methods shows that centimeters and arcminutes level of accura-cies for position and attitude solutions, respectively, can be success-fully achieved throughout onshore hydrographic surveys. Also, it is shown that the KSACORS-based NRTK GNSSINS and NPPK GNSS-INS integration systems fulfill IHO standards for all survey orders and can be employed for Saudi coastal multibeam echosounding surveys. The significant contribution of the paper is that it imple-mented the performance of KSACORS-based NRTK GNSS-INS and NPPK GNSSINS integration systems for hydrographic surveying application and validated their accuracies against IHO standards.
1. Introduction
Over the past years, positioning at sea for hydrographic surveying, navigation, and other operations, has been revolutionized by the use of the Global Navigation Satellite System (GNSS). There are several modes in which GNSS can be used, yielding a progression of improving three-dimensional position accuracies (at the 95%confidence level) such as single receiver in autonomous mode (10-20 m accuracy), differential code in standard DGNSS mode (1-5 m accuracy), differential carrier-phase with floating-point cycle ambiguities (0.2-0.8 m accuracy), Precise Point Positioning (PPP) mode (0.1-0.2 m accuracy) and differential carrier-phase with fixed-integer cycle ambiguities in Real-Time Kinematic (RTK) and Post-Processed Kinematic (PPK) modes (0.01-0.05 m accuracy) (Hofmann-Wellenhof et al. 2008; El-Diasty 2016). All these modes are in common use. Sub-decimeter marine vertical positioning accuracies are required for the measurement of water level variations (tides, etc.), hydrographic surveying, navigation and other marine operations. For modern hydrographic surveys, multibeam echosounding is widely employed to provide sea-floor mapping with relatively high-quality level and 100% coverage and is capable of delin-eating seabed features at the centimeters level in shallow water hydrographic surveys. Because of their wide-swath, an accurate positioning and attitude system is required to accurately geo-referencing the multibeam echosounder. Integration of GNSS and Inertial Navigation System (INS) is widely used for positioning and attitude of the hydrographic surveying vessel. Integration of GNSS and INS is carried out using an inertial unit integrated with RTK-based or PPK-based GNSS solution using GNSS receivers in the survey area along with a base GNSS receiver at accurately known coordinate to provide the required position and attitude accuracy recommended by the International Hydrographic Organization (IHO) (El-Diasty 2010). However, the requirement of setting up a base GNSS station in the survey area for RTK-based and PPK-based GNSS system increases the positioning system cost and hence the RTK-based and PPK-based GNSS-INS systems are considered as an expensive GNSS posi-tioning system. Moreover, with traditional single-base RTK-based and PPK-based GNSS processing, it is always necessary to be within 20 to 30 km of a base station sometime during the survey mission in order to resolve the ambiguities. If the distance is greater than 20 to 30 km from a reference station, the residual error caused by the atmosphere delaying the GNSS signals reaches a required reliable magnitude to fix carrier ambiguities and provide centimeters level of accuracy (Hutton et al. 2007, 2008). Advances in a Continuously Operating Reference Stations (CORS) network technology at national and international levels have shown promising light towards the development of an autonomous and low cost GNSS solution for position-ing applications where one GNSS receiver (rover) is only employed. The typical distances between CORS network stations are usually designed to span between 50 to 70 km and can transmit a Networkbased Real-time Kinematic GNSS data of a Virtual Reference Station (NRTK_VRS) to a roving station in Radio Technical Commission for Maritime (RTCM) format from the CORS control centers to provide centimeters level of accuracy (Landau et al. 2002; Tusat 2018). Also, the archived GNSS observation data from the CORS network stations can be employed in Network-based Post-Process Kinematic mode to generate a virtual postprocessed VRS station (NPPK_VRS) to provide centimeters level of accuracy (Hutton et al. 2007, 2008). Recently, the Saudi KSACORS network GNSS stations were developed by Saudi Geodetic Commission for Survey (GCS) to maintain an accurate GNSS positioning solution for governmental and private sectors within Saudi Arabia cover-age area.
This paper investigates the performance of network GNSS-INS integration using a most recently lunched national KSACORS network GNSS corrections (offi-cially launched on April 2013) to obtain a precise position and attitude solution for Saudi coastal hydrographic surveys. This paper also investigates whether the archived accuracy fulfill the International Hydrographic Organization (IHO) standards for all hydrographic survey orders. The investigated realtime KSACORS-based NRTK GNSSINS position and attitude solution can be considered as an alternative low-cost approach when compared with RTK-based GNSS-INS solution. Also, the investigated post-processed KSACORS-based NPPK GNSS-INS position and attitude solution can be considered as an alternative lowcost approach when compared with PPK-based GNSS-INS solution. To examine the performance of the proposed KSACORS-based NRTK and NPPK GNSS-INS integrated system for hydrographic surveys, kinematic GNSS and inertial data for two survey tests were collected onboard a hydrographic surveying vessel using Applanix position and orientation system for marine vessels (POS-MV). POS-MV is comprised of a dual frequency GNSS receiver (BD982 by Trimble) and tactical-grade inertial measurement unit (IMU) (LN-200 by Northrop Grumman).
To meet the paper objective, the KSACORS-based NRTK and NPPK GNSS solution was integrated with INS to provide an accurate position and attitude solution for the hydrographic surveying vessel. Then, the accuracy of the proposed system was investigated whether it can meet the international standards (IHO standards) for hydrographic surveys performed by multibeam echosounder. In principle, the accuracy represents the difference between the proposed solutions (systems under investiga-tion) and the reference solution (considered as a “truth” solution) and it is investi-gated based on the estimated root-mean-square (RMS) errors. The main contribution of the paper lies in two folds. First, the paper implements the performance of KSACORS-based NRTK GNSS-INS and NPPK GNSS-INS integration systems for hydrographic surveying application. Second, the achieved accuracies from the two GNSS-INS integrated systems under investigation are validated against IHO stands for all hydrographic survey orders.
2. KSACORS-based NRTK and NPPK GNSS-INS navigation solution
Network CORS solution has proven that it is a valuable method for accurate position-ing which can be applied over a national scale. By the presence of the CORS network, the GNSS solution accuracy can reach centimeters level of accuracy (Ulrich et al. 2000; Retscher 2002; Wei et al. 2006; Hofmann- Wellenhof et al. 2008). Currently, the Saudi KSACORS network corrections provide an accurate GNSS corrections for net-work real-time kinematic (NRTK) and network post-processed kinematic (NPPK) applications. KSACORS utilizes the GNSS data from about 200 continuously operat-ing GNSS stations, as shown in Figure 1, to estimate the network corrections (Golubinka 2018; GCS 2019). The KSACORS control center takes the responsibility to process the data from KSACORS stations and estimate the real-time GNSS errors (ionospheric error, tropospheric error, orbital error and carrier phase ambiguities fix) and generate a GNSS observation data of a Virtual Reference Station (VRS) in stand-ard RTCM format for real-time GNSS solution for the end user, however, the raw observation data of all KSACORS stations are stored in the KSACORS repository for post-processing solution. In realtime mode, the RTCM data are delivered to end user over the Network Transport of RTCM by Internet Protocol (NTRIP) by the KSACORS control center (Alomar et al. 2018) to achieve NRTK solution. The real-time RTCM data are classified to types of corrections, so called “NRTK_VRS” for applications that require centimeters level of accuracy and “DGNSS_VRS” for applica-tions that require decimeters to a meter level of accuracy. However, in the post-processing mode, the NPPK solution can be achieved using a post-processed virtual reference station (SmartBase) generated from multiple GNSS stations data downloaded from the KSACORS website. Typically, three GNSS CORS stations can be employed to generate a SmartBase (VRS station), however, a minimum of four GNSS CORS stations are recommended to provide a more robust GNSS positioning solution (Hofmann-Wellenhof et al. 2008; Hutton et al. 2008). The integration of KSACORS-based NRTK and NPPK GNSS positioning system with inertial navigation system are evaluated in this paper. The baselines for the CORS stations are usually designed to be within a range of 50-70 km to achieve centimeters level of accuracy (Retscher 2002; Rizos and Han 2003).
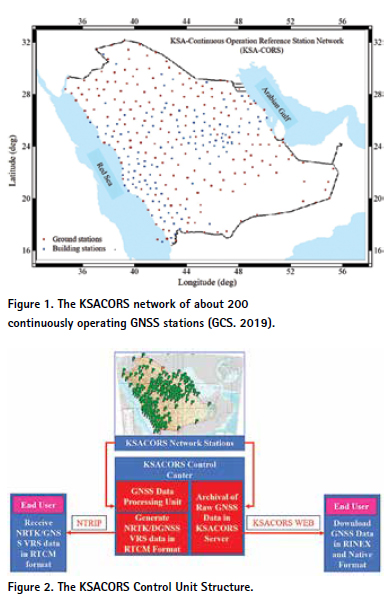
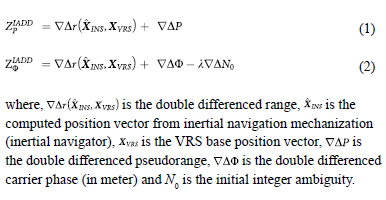
Figure 2 shows how the KSACORS control center receives the real-time raw GNSS data form all CORS network stations and process it to estimate the GNSS errors (ionospheric error, tropospheric error, orbital error and carrier phase ambiguities fix) based on static CORS network stations of accurately estimated coordinates that were employed to realize the Saudi national geodetic reference frame (Golubinka 2018). Then the KSACORS control center generates NRTK_VRS GNSS data in standard RTCM format (Alomar et al. 2018). The end user with GNSS rover can receive real-time RTCM corrections via NTRIP protocol using an internet access to KSACORS web for an authorized user. Moreover, the GNSS observation data for all stations are archived in KSACORS repository server for post-processed network-based GNSS solution. The real-time NRTK and post-processed NPPK GNSS positioning are com-mon in implementing VRS concept. The details of VRS observation generation algo-rithms can be found in Wei et al. (2006) and Hofmann-Wellenhof et al. (2008).
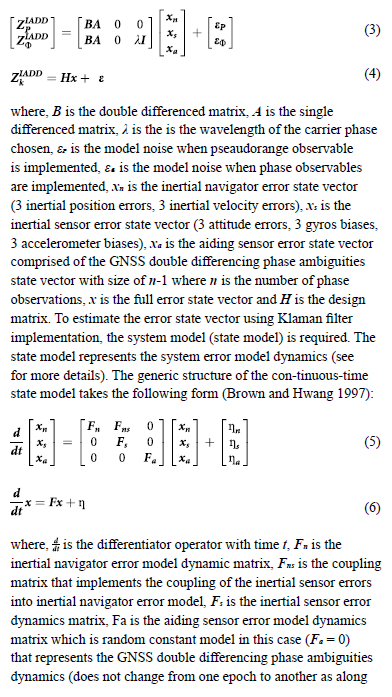
The GNSS data (pseudoranges and carrier phases) and inertial data (accelerometers and gyros measurements) of rover along with GNSS data of VRS base are integrated in a tightly coupled scheme to provide the KSACORS-based NRTK and NPPK GNSS-INS Navigation solution. The observations from GNSS VRS base and GNSS rover are integrated with INS navigation system in tightly coupled scheme using Klaman filter to estimate the high accurate navigation solution and associated uncer-tainties. The Kalman filter constructs double differences of these observations at the rover and VRS base. The Inertially Aided Double Differenced (IADD) pseudorange observable ZpIADD and phase observable ZΦIADD for a single baseline between rover and VRS base are represented in the following forms (Scherzinger 2000):
From all double differenced observables, the measurement model of the errors can be written in two compact forms as (Scherzinger 2002):
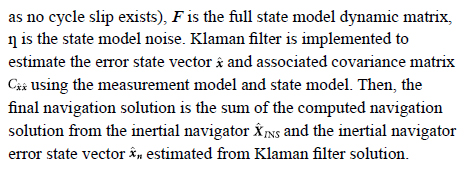
For KSACORS-based NRTK GNSS-INS Navigation solution, the real-time forward Kalman filter is implemented. However, for KSACORS-based NPPK GNSS-INS Navigation solution, the post-processed forward-backward smoother is implemented. The forward-backward smoother navigation solution is estimated as follows (Gelb 1974):
3. Methodology
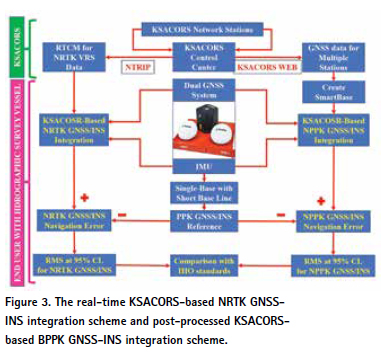
To evaluate the KSACORS performance for coastal hydrographic surveying applica-tions, the real-time KSACORS-based NRTK GNSS-INS integration and post-proc-essed KSACOSR-based NPPK GNSS-INS integration solutions were investigated. Figure 3 shows the methodology implemented in this paper to evaluate the KSACORS performance in real-time and post-processed mode using positioning and attitude system that comprises dual GNSS system, for accurate positioning and heading solution, and Inertial Measurement System (IMU), for accurate attitude solu-tion. In real time mode, the KSACORS control center transmits a real-time NRTK_VRS GNSS data in RTCM format to the GNSS-MU system via NTRIP proto-col to provide NRTK GNSS-INS navigation solution. In post-processing mode, the GNSS observation files from multiple KSACORS stations (minimum recommended number of stations are four stations) are retrieved from the KSACORS website to be employed in creating a virtual SmartBase station in the survey area using Applanix POSPac tools software, where the GNSS data of the generated SmartBase is then employed to provide post-processed NPPK GNSS-INS navigation solution (Applanix 2017). It should be noted that the measurement component includes an inertial meas-urement unit (IMU), which consists of accelerometers, and gyros that can provide the essential acceleration and rotation information of the vessel, and a dual-frequency GPS receiver which can provide dual-frequency pseudo range, carrier phase and phase rate measurements. To investigate the accuracy performance of the two pro-posed integration schemes in this paper, a comparison is made between the proposed KSACORSbased NRTK GNSS-INS and NPPK GNSS-INS integration schemes, against the GNSS-INS navigation solution based on GNSS data collected by the single-base station with short baseline for the survey area that is considered as a “reference” solution, so called reference PPK GNSS-INS. Two RMS errors at 95%confidence level for 3D positions, roll, pitch and heading are estimated from the KSACORS-based NRTK GNSS-INS and NPPK GNSS-INS navigation solution when compared against reference PPK GNSS-INS navigation solution to investigate whether this navigation solution can meet the international standards (IHO standards) for hydrographic surveys. It should be noted that the GNSS-INS navigation solution proposed in this paper is carried out by POSPac tools software based on data collected from POS-MV system. In POSPac, a tightly coupled filter for GNSS-INS integration is employed to provides a more accurate solution when compared with a loosely coupled filter (Applanix 2017). The NRTK GNSS-INS navigation solution is investi-gated using the tightly coupled real-time forward Klaman filter solution. The NPPK GNSS-INS navigation solution is investigated using the tightly coupled postprocessed forward-backward smoother solution from POSPac.
4. Multibeam surveying standards
The main objective of this paper is to evaluate the real-time KSACORS-based NRTK GNSS-INS integration and the postprocessed KSACORS-based NPPK GNSS-INS integration navigation solution performance for coastal hydrographic surveying applications and then to investigate whether this navigation solution can meet the inter-national standards (IHO standards) for hydrographic surveys. The heave of the vessel must be measured to an accuracy of better than 0.05 m or 5% of the maximum heave to be consistent with the IHO standard. Heading error impacts the position error of each acoustic pixel. The acoustic pixel size represents the resolution of the bathymet-ric data and is selected by the hydrographer based on the type of the application, but it should not be less than the smallest acoustic pixel size that is a depth dependent.
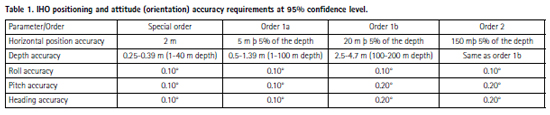
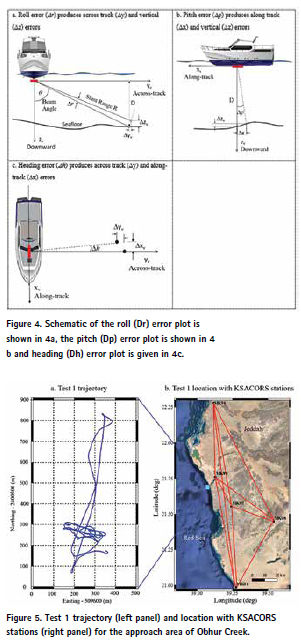
In order to obtain a 0.5 m pixel position error in the outer beam of a ± 75° fan at a depth of 100 m, the heading error must be better than 0.05°. On the other hand, the roll and the pitch errors cause both horizontal and vertical errors. Consequently, the roll and pitch of the vessel must be measured to an accuracy of better than 0.05° if the multibeam echosounder system of ±75° from nadir swath width is utilized. Therefore, the attitude parameters in all three axes (roll, pitch and heading) of the vessel must be measured to an accuracy of better than 0.05° if a high accuracy multi-beam echosounder system is utilized. Figure 4 shows the roll, pitch and heading errors and how these errors introduce depth, alongtrack and across-track errors. These limits are estimated upon the worst-case combination of biases and measure-ment noise. In summary, to achieve full utilization of a multibeam echosounder and satisfy IHO standards, the hydrographic surveying vessel must be measured at the 95% confidence level for accuracy as shown in Table 1 (Scherzinger 2005; IHO 2008; El-Diasty 2016).
5. Field test description
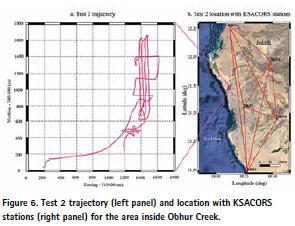
To examine the performance of the KSACORS-based NRTK GNSS-INS and NPPK GNSS-INS navigation solution for hydrographic surveying application, kinematic data from a dual frequency Trimble BD982 GNSS receiver and inertial data from a tactical-grade IMU (LN-200 by Northrop Grumman) were collected on April 17th, 2019 in Obhur Creek approach (test 1) and on November 14th, 2017 inside Obhur Creek (test 2) onboard a hydrographic surveying vessel called “KAU Hydrography 2” owned by the Department of Hydrographic Surveying, Faculty of Maritime Studies of King Abdulaziz University. Figures 5 and 6 show the test 1 and test 2 trajectories in Obhur Creek approach (mouse) and inside Obhur Creek, respectively, in Jeddah of Saudi Arabia that is located on Red Sea. In test 1 and test 2, two GNSS antennas were used to estimate the GPS heading, in addition to the GNSS position solution for updating the INS navigation solution to provide accurate GNSS-INS integrated navigation solution. The reference station measurements at the roof of Faculty of Maritime Studies (spans about few kms from the moving rover stations) were simultaneously collected and employed to estimate the PPK GNSS-INS navigation solution and considered as the reference solution to validate the KSACORSbased real-time NRTK GNSS-INS and post-processed NPPK GNSS-INS navigation solutions. The real-time NRTK_VRS RTCM data were received by Applanix POSView acquisition software via NTRIP cli-ent with account authorized from GCS to provide realtime NRTK GNS/INS naviga-tion solution. Fore test 1 and test 2, five stations from KSACORS network were downloaded from KSACORS web to create virtual SmartBase station to provide postprocessing NPPK GNS/INS navigation solution. Figures 5 and 6 shows the network of five stations that were employed to create virtual SmartBase station for test 1 and test 2 survey areas. The closest network GNSS stations to test 1 test 2 are about 8 km and 25 km, respectively. It is shown in Figures 5 and 6 that the network structure for test 1 and test 2 comprises four identical stations (MK01, MK96, MK97 and MK98), however, test 1 additionally comprises MK99 and test 2 additionally comprises MK93 based on the KSACORS GNSS data availability during the test time.
6. Results and discussion
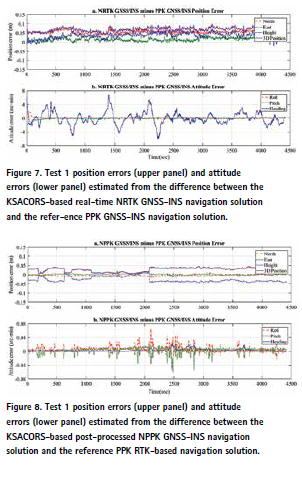
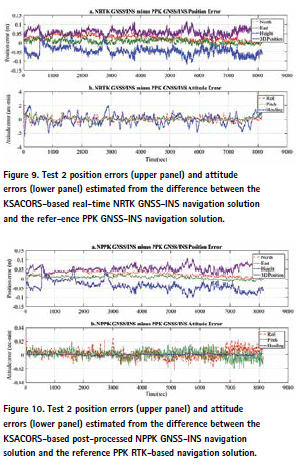
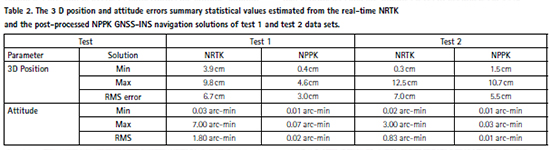
The real-time KSACORS-based NRTK GNSS-INS, postprocessed KSACORS-based NPPK GNSS-INS navigation solution and the reference post-processed PPK GNSS-INS navigation solution were obtained using the collected GNSS and IMU data measurements. Then, the performance of the developed real-time NRTK GNSS-INS and the post-processed NPPK GNSSINS integrated systems were investigated whether it can meet the IHO standards for hydrographic surveys, particularly the horizontal pos-ition, roll, pitch and heading accuracies. Figures 7 and 8 show the position (north, east, height and 3D position) and attitude (roll, pitch, and heading) differences (errors) for test 1 between the position and attitude estimated from the real-time NRTK and NPPK GNSS-INS navigation solutions, respectively, and the position and attitude estimated from the “reference” PPK GNSS-INS integrated solution, where PPK is considered as a “reference” solution. Figures 9 and 10 show the position and attitude differences (errors) for test 2 between the position and attitude estimated from the real-time NRTK and NPPK GNSS-INS navigation solutions, respectively, and the position and attitude estimated from the “reference” PPK GNSS-INS inte-grated solution, where PPK is considered as a “reference” solution. Table 2 shows the 3D position and attitude errors summary statistical values estimated from the real-time NRTK and the post-processed NPPK GNSS-INS navigation solutions for test 1 and test 2 datasets. It can be seen from test 1 and test 2 summary statistics in Table 2 that the position accuracy estimated from the post-processed NPPK GNSS-INS navigation solutions (NPPK solutions of tests 1 and 2) based on 3D position RMS error (about 4 cm in average) outperforms the position accuracy estimated from the real-time NRTK GNSS-INS navigation solutions (NRTK solutions of tests 1 and 2) based on 3D position RMS error (about 7 cm in average). It can also be seen from test 1 and test 2 statistics that the attitude accuracy estimated from the post-processed NPPK GNSS-INS navigation solution (NPPK solutions of tests 1 and 2) based on attitude RMS error (about 0.015 arc-min in average) is significantly superior to the atti-tude accuracy estimated from the real-time NRTK GNSS-INS navigation solution (NRTK solutions of tests 1 and 2) based on attitude RMS error (about 1.5 arc-min in average) with about two orders of magnitude. It should be noted that the position accuracy estimated from test 1 (NRTK and NPPK solutions) based on 3D position RMS error (about 4.5 cm in average) outperforms the position accuracy from test 2 (NRTK and NPPK solutions) based on 3D position RMS error (about 6.5 cm in aver-age) because the closest GNSS KSACORS station to test 1 is about 8 km and the clos-est GNSS KSACORS station to test 2 is about 25 km that makes the VRS station created in test 1 case closer to the survey area more than the VRS station created in test 2 case. It is also worth noting that the attitude solution estimated from test 2 (NRTK and NPPK solutions) based on attitude RMS error (about 0.4 arc-min in average) outperforms the attitude solution estimated from test 1 (NRTK and NPPK solutions) based on attitude RMS error (about 0.9 arc-min in average) because the test 2 survey area is located inside Obhur Creek which is considered low sea dynamic state (shallow area) with low orientation dynamic and produces less attitude errors, however, the test 1 survey area is located in Obhur Creek approach (mouse) which is considered high sea dynamic state (deeper and open area) with high orientation dynamic and produces high attitude errors.
Now, the errors should be estimated at 95% confidence level as recommended by IHO. Figures 11 and 12 show the cumulative position (2D horizontal and vertical errors) and attitudes (roll, pitch and heading errors) errors distribution from the realtime NRTK and NPPK GNSS-INS navigation solutions of test 1 datasets, respectively, that show the majority of position and attitude errors at 95% confidence level from the real-time NRTK GNSS-INS navigation solution. Figures 13 and 14 show the cumulative position (2D horizontal and vertical errors) and attitudes (roll, pitch and heading errors) errors distribution from the real-time NRTK and NPPK GNSS-INS navigation solutions of test 2 datasets, respectively, that show the majority of position and attitude errors at 95% confidence level from the real-time NRTK GNSS-INS navi-gation solution. Figures 11–14 show that centimeters and arc-minutes level of accuracies at 95% confidence level can be successfully achieved for the position and attitude solutions, respectively, when KSACORS-based NRTK or NPPK GNSS-INS integration methods employed for hydrographic surveys applications in test 1 and test 2.
To estimate the overall RMS error, the differences (errors) between the KSACORS- based real-time NRTK GNSSINSS and post-processed NPPK GNSS-INS integrated where RMSNRTK is the best estimates of the root-mean-square error of the KSACORSbased real-time NRTK GNSS-INSS integrated solution, RMSNRTK-PPK is the estimated root-mean-square error of the actual error difference of the real-time NRTK GNSS-INS integrated solution when compared against reference PPK GNSS-INS integrated solution, RMSPPK is the best estimates of the root-meansquare error of the “reference” PPK GNSS-INS integrated solution, RMSNPPK is the best estimates of the root-meansquare error of the KSACORS-based post-processed NPPK GNSS-INSS integrated solution and RMSNPPK-PPK is the estimated root-mean-square error of the actual error difference of the postprocessed NPPK GNSS-INS integrated solu-tion when compared against reference PPK GNSS-INS integrated solution.


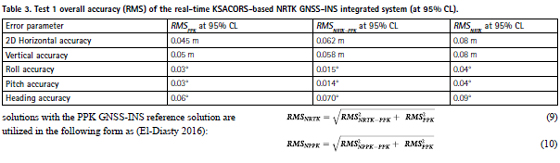
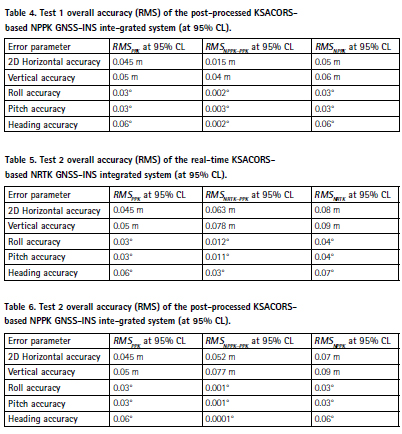
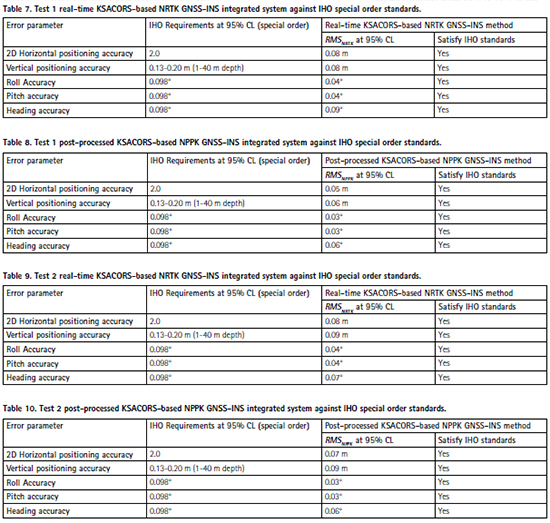
Tables 3 and 4 show the test 1 root-meansquare errors (overall accuracy -RMSNRTK and RMSNPPK ) for 2D horizontal position, vertical position, roll, pitch and heading at 95% confidence level estimated based on Equations 9 and 10 using the realtime KSACORS-based NRTK and NPPK GNSS-INS navigation solutions, respectively. Tables 5 and 6 show the test 2 root-mean-square errors (overall accuracy -RMSNRTK and RMSNPPK ) for 2D horizontal position, vertical position, roll, pitch and heading at 95% confidence level estimated based on Equations 9 and 10 using the real-time KSACORS-based NRTK and NPPK GNSS-INS navigation solutions, respectively. Tables 7–10 show test 1 and test 2 root-mean-square errors (overall accuracy) of the evaluated realtime KSACORS-based NRTK GNSS-INS integrated navigation solutions and the evaluated post-processed KSACORSbased NPPK GNSS-INS inte-grated navigation solutions, respectively, against the IHO special order requirements for horizontal position, vertical position, roll, pitch, and heading at 95% confidence level. It should be noted from Tables 7–10 that the IHO vertical positioning accuracy ranges from 20% to 60% of the total depth error listed in Table 1 when the tide is estimated from the GNSS-INS integrated system (called GNSS tide) in hydrographic of the evaluated real-time KSACORS-based NRTK GNSS-INS integrated navigation solutions and the evaluated post-processed KSACORSbased NPPK GNSS-INS inte-grated navigation solutions, respectively, against the IHO special order requirements for horizontal position, vertical position, roll, pitch, and heading at 95% confidence level. It should be noted from Tables 7–10 that the IHO vertical positioning accuracy ranges from 20% to 60% of the total depth error listed in Table 1 when the tide is estimated from the GNSS-INS integrated system (called GNSS tide) in hydrographic data processing workflow (Van Norden et al. 2008; El-Diasty 2016). It is shown from Tables 7–10 that the evaluated realtime KSACORS-based NRTK GNSS-INS naviga-tion solution accuracies and the evaluated post-processed KSACORSbased NPPK GNSS-INS navigation solution accuracies at 95% confidence level for test 1 and test 2 fulfill the IHO order special order for 2D horizontal position, vertical position, roll, pitch and heading standards at 95% confidence level. Consequently, the IHO order 1a, IHO order 1 b and order 2 requirements (shown in Table 1) are fully fulfilled with the evaluated NRTK and PPK GNSSINS integrated solutions. Therefore, it is concluded that the evaluated real-time KSACORS-based NRTK GNSS-INS integrated solution and the evaluated post-processed KSACORS-based NPPK GNSS-INS inte-grated solution can fulfill the IHO requirements for all orders. It was found from test 1 and test 2 results that the vertical accuracy is considered as the most stringent IHO standard requirement and accurate GNSS-INS vertical solution is required. It is worth noting that as far as the multibeam survey area is located far in distance from the shore and consequently far in distance from KSACORS stations, the KSACORSbased GNSS-INS vertical solution accuracy becomes less, however, the IHO standard verti-cal requirement become less stringent where it is respectively reduced in order classi-fication from special order to lower orders as shown in Table 1.
7. Conclusion and recommendation
This paper evaluated a real-time KSACORS-based NRTK GNSS-INS integrated solu-tion and a post-processed KSACORS-based NPPK GNSS-INS integrated solution and then investigated whether these methods can meet the international standards (IHO standards) for hydrographic surveys performed by multibeam echosounder. It is shown that the real-time KSACORS-based NRTK GNSS-INS integrated solution and the post-processed KSACORS-based NPPK GNSS-INS integrated solution accuracies for horizontal position, vertical position, roll, pitch and heading can fulfill the IHO special order, order 1a, order 1b and order 2 requirements at 95% confidence level. The significance of the evaluated realtime that the real-time KSACORS-based NRTK GNSS-INS integrated system model and the post-processed KSACORSbased NPPK GNSS-INS integrated system model is that they introduced an alternative, inexpensive navigation solution to the traditional PPK GNSS-INS system model that requires a dedicated single-base station where these methods employed the free of charge KSACORS products delivered to the end user in real time and post-processed modes.
However, it is recommended to employ the real-time KSACORS-based NRTK or post-processed NPPK GNSS.INS integrated methods for hydrographic survey for an area within a KSACORS baseline limit of 70 km to the nearest onshore KSACORS station if accurate navigation solution at centimeters level of accuracy is required.
Acknowledgements
This project was funded by the Deanship of Scientific Research (DSR), King Abdulaziz University, Jeddah, under grant no. D-102-980-1441. The authors, therefore, acknowledge with thanks DSR technical and financial support. Also, the author would like to acknowledge the Saudi Geodetic Commission for Survey (GCS) for kindly providing the author an access to the KSACORS real time NRTK_VRS RTCM data and to the KSACORS website.
References
Alomar A, Yanar R, Albalawi S, Alzahrani S. 2018. The Kingdom of Saudi Arabia GNSS real-time kinematic network (MRTN) and beyond (a case study for high accuracy vrs correction test). FIG Congress, Istanbul, Turkey, 6–11 May, 2018.
Applanix. 2017. POSPac MMS GNSSInertial Tools Software. Richmond Hill, Canada: Applanix Corporation.
Brown RG, Hwang P. 1997. Introduction to random signals and applied kalman filtering. Toronto, Canada: John Wiley & Sons, Inc. El-Diasty M. 2010. Development of a MEMS-based INS/GPS vessel navigation system for marine applications [PhD dissertation]. Toronto (Canada): York University.
El-Diasty M. 2016. Development of real-time PPP-based GPS/INS integration system using IGS realtime service for hydrographic surveys. J Surv Eng. 142(2):05015005. pp
GCS. 2019. KSA-continuous operation reference station network. [accessed 2019 Nov]. https://ksacors.gcs.gov.sa/. Gelb A. 1974. Applied optimal estimation. Cambridge, MA: The MIT Press.
Golubinka L. 2018. GCS (General Commission for Survey, Riyadh, KSA) Data & Analysis Centre – the results of processing the data from GNSS CORS network. IGS Workshop pos-ter, IGS Workshop,
Hofmann-Wellenhof B, Lichtenegger H, and E. Walse. 2008. GNSS global navigation satellite systems; GPS, glonass, galileo & more. New York: Springer-Verlag Wien.
Hutton J, Alan A, Bourke T, Scherzinger B, Gopaul N, Canter P, Ovel I, Blankenberg L. 2008. Tight integration of GNSS post-processed virtual reference station with inertial data for increased accuracy and productivity of airborne mapping. Remote Sens Spatial Inform Sci. 37(Part B5): 15–16.
Hutton J, Bourke T, Scherzinger B. 2007. New developments of inertial navigation systems at Applanix. Photogrammetric Week’07; p. 201–213.
IHO (International Hydrographic Organization Committee). 2008. IHO Standards for Hydrographic Surveys. 5th ed., Special Publication No. 44, MONACO: International Hydrographic Bureau. Landau H, Vollath U, Chen X. 2002. Virtual reference station systems. J Global Position Syst. 1(2):137–143.
Retscher G. 2002. Accuracy performance of virtual reference station (VRS) networks. J Global Position Syst. 1(1):40–47.
Rizos C, Han S. 2003. Reference station network based RTK systems – concepts and progress. Wuhan Univ J Nat Sci. 8(2):566–574. No
Scherzinger BM. 2000. Precise robust positioning with inertial/GPS RTK. Proceedings of GPS- 2000, The Institute of Navigation, Alexandria, VA; p. 155–162. Scherzinger BM. 2002. Robust positioning with single frequency inertially aided RTK. Proceeding of ION NTM’02, San Diego, CA; p. 911–917.
Scherzinger BM. 2005. Economics of INS/ GPS integration for survey applications. Proceedings of the 52nd CASI Conference, Toronto, Canada, April 26. Tusat E. 2018. A comparison of the accuracy of VRS and static GPS measurement results for production of topographic map and spatial data: a case study on CORS-TR. Tech Gaz. 25(1): 158–163.
Ulrich V, Alois A, Herbert L, Christian P, Bernhard W. 2000. Long-Range RTK Positioning Using Virtual Reference Stations. Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, September 2000; p. 1143–1147.
Van Norden MF, Ladner, RW. Arroyo- Suarez EN. 2008. Developing a concept of operations for military surveys to IHO standards without shorebased stations. Proceedings of the Canadian Hydrographic Conference and National Surveyors Conference.
Wei E, Chai H, An Z, Liu J. 2006. VRS virtual observations generation algorithm. J Global Position Syst. 5(1–2):76–81.
“Copyright 2020 The Author(s). The paper first published by Informa UK Limited, trading as Taylor & Francis Group in Geomatics, Natural Hazards and Risk, 11:1, 1426-1446, DOI: 10.1080/19475705.2020.1799081. The paper is republished with authors’ permission.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/ licenses/ by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.











 (2 votes, average: 3.00 out of 5)
(2 votes, average: 3.00 out of 5)




Leave your response!