| Applications | |
EDAS: EGNOS data over the internet for added value services
This EDAS Service has been officially available for GNSS community since July 2012, with a commitment of minimum availability of 98.5% for the main data services and of 98% for the rest of the EDAS Services |
 |
|
 |
|
 |
|
 |
|
European Geostationary Navigation Overlay Service (EGNOS), the European Satellite Based Augmentation System (SBAS), provides corrections and integrity information to GPS signals over a broad area centred over Europe, and is fully interoperable with other existing SBAS systems (e.g., WAAS, the brand name of the American SBAS).
ESSP (European Satellite Services Provider) is the EGNOS system operator and EGNOS Service provider of the following three services:
• EGNOS Open Service (OS), freely available to any user;
• EGNOS Safety of Life (SoL) Service, that provides the most stringent level of signal-in-space performance to all Safety of Life user communities;
• EGNOS Data Access Service (EDAS) is the EGNOS terrestrial data service offering ground-based access to GNSS data to authorised users.

As it can be observed in Figure 1, EDAS is the access point to the data collected and generated by the EGNOS ground infrastructure through the EGNOS stations network. In consequence, EDAS gathers all the raw data coming from the GPS, GLONASS and EGNOS GEO satellites collected by all the receivers located at the EGNOS stations. There are currently 39 ground stations (Ranging and Integrity Monitoring Station – RIMS) and 6 uplink stations (Navigation Land Earth Stations – NLES), mainly distributed over Europe and North Africa. EDAS disseminates this GNSS data in real time to EDAS users and/or Service providers that distribute the data locally or to a specific set of applications. In consequence, EDAS allows users to ‘plug in’ to EGNOS system by providing access to GPS/GLONASS satellite navigation and observation data, along with the EGNOS messages received by EGNOS ground stations.
EDAS therefore provides an opportunity to deliver EGNOS data to users who cannot always view the EGNOS satellites (such as in urban canyons), or Global Navigation Satellite System (GNSS)/ Differential GNSS (DGNSS) data to support a variety of other services, applications and research programs.
European Commission (EC) launched the EDAS Service on July 26, 2012, declaring it officially available to EU users. This event was accompanied by the publication of the EDAS Service Definition Document v1.0. The ‘EDAS Service Definition Document’ (EDAS SDD) provides information on the EDAS services available and their conditions of use. On April 10, 2013, a new set of EDAS Services were made available to the GNSS community: Data Filtering, SISNeT, File Transfer Protocol (FTP) and Networked Transport of Radio Technical Commission for Maritime Services (RTCM) via Internet Protocol (NTRIP). In consequence, EC released a new version (v2.0) of the EDAS Service Definition Document (see ref. European Satellite Services Provider (ESSP), 2013c) with the aim to reflect these new services and associated added value for EDAS users. This expansion is the consequence of the EGNOS program strategy to continuously improve all the EGNOS services and further support user needs.
EDAS User Registration and Support
In order to request an EDAS account, users should follow the steps detailed below:
1. Visit and register in the EGNOS User Support Website: http:// egnos-user-support.essp-sas.eu
2. Fill and submit the EDAS registration form (only accessible upon online registration): http:// egnos-user-support.essp-sas.eu/ egnos_ops/edas_registration
After the verification of the provided data, the EGNOS Helpdesk will provide the user with the credentials and configuration details necessary to connect to the requested EDAS Service. Additionally, the website credentials will allow the user to download user oriented documentation and SW, such as the EDAS Client SW User Manual and the user information packages for each EDAS Service.
EDAS users are welcome to contact the EGNOS Helpdesk for EDAS registration and for any request or question related to EDAS, including but not limited to EDAS services status and performance, connectivity issues, technical specifications, data streams structure, conditions of use, etc. Prior to that, users are kindly invited to read the FAQs available at the ESSP (see Web-1) and the EGNOS User Support (see Web-2) websites.
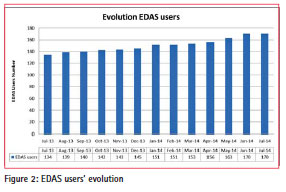
At the time of writing this paper, there were 170 EDAS registered users. The evolution in terms of number of registered users in the last year is depicted in Figure 2:
EDAS On line information
The following information could be found on line regarding EDAS:
• EDAS Service Definition Document (see ref. ESSP, 2013c, available at Web-3 and Web-4): This EDAS SDD provides information on the EDAS services and their conditions of use. In terms of content, the EDAS SDD describes the EDAS system architecture and provides an overview of the current EDAS services with regards to the information that is transmitted, the data formats, protocols and committed performances.
• EGNOS User Support Website (see Web-2): Up-to-date information about the EDAS Services, along with the interface with the EGNOS helpdesk and the form to register as EDAS user is located in the EGNOS User Support Website.
• EGNOS Monthly performance report (see Web-5): This EGNOS monthly performance report contains the EDAS performances of the last month, in terms of availability and latency for all services.
EDAS Services
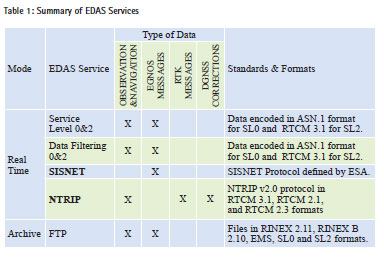
There are different types of data available from EDAS that can be exploited for different purposes. The real-time and historical data provided by EDAS are mainly:
• The Global Positioning System (GPS), GLONASS and EGNOS Geostationary Earth Orbit or Geostationary satellite (GEO) observations and navigation data collected by the entire network of Ranging and Integrity Monitoring Stations (RIMS) and Navigation Land Earth Stations (NLES).
• EGNOS augmentation messages, as normally received by users via the EGNOS geostationary satellites.
• Differential GNSS (DGNSS) and RTK (Real-Time Kinematic) messages allowing users implementing advanced positioning techniques to obtain submetre to centimetre level accuracy.
This type of data is encoded and sent in different formats and protocols, resulting in the available set of EDAS services. Table 1 shows a summary of the type of data provided by each service, along with the standard and format used.
Main data stream services
The raw observation data gathered by EGNOS stations, including RIMS sites and NLES stations, is provided by EDAS in real time with an update rate of one second. The main types of data provided by the main data stream services are:
• Service Level 0 (SL0): it provides data encoded in ASN.1 format (see Web-6). It is recommended for those users willing to transmit data in raw format, or transmit them in a format that allows a complete reconstruction after decoding.
• Service Level 2 (SL2): it is used to transmit data in RTCM 3.1 standard (see RTCM, 2011).
Each EDAS message is embedded in a frame which starts with the EDAS Control Header, followed by the platform message whose format depends on the Service Level and the kind of contained data. The details about the message format are explained in the EDAS Client SW User Manual (see ref. ESSP, 2013), that is available to registered users at the ‘EDAS Documentation & SW’ tab within the EDAS section of the EGNOS User Support website (see Web-2).
A platform-independent interface element (executable through command line or in the graphical mode), called EDAS Client Software, allows users to connect to these Service Levels and retrieve data. This application is available to users after registration and is described in the aforementioned Client SW Manual (see ref. ESSP, 2013), which includes installation process, configuration, functions and data output format.
Data Filtering Service
The EDAS Data Filtering Service allows EDAS users accessing a subset of the Service Level 0 or Service Level 2 data. The EDAS Client SW allows selection one of the available predefined groups that are a subset of the EGNOS stations, and the data rate of the received messages. This means that EDAS users can be subscribed to a predefined group of RIMS and retrieve data from these set of stations at 1Hz or 1/30 Hz. The details about the message format and configuration are explained in the EDAS Client SW User Manual (see ref. ESSP, 2013).
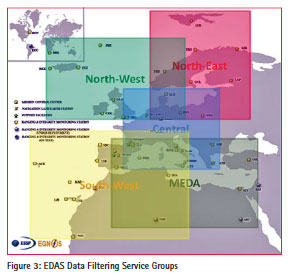
In consequence, the Data Filtering Service enables reduction of the bandwidth consumption and amount of data to be processed on the user side with respect to the corresponding main data stream. The current configuration of this service, that illustrates the way in which the EDAS Data Filtering Service groups can be defined, includes six groups. One of them includes all the EGNOS RIMS A stations, whereas the remaining five include a subset of RIMS A based on a geographical criteria shown in Figure 3:

SISNeT Service
The main purpose of the EDAS SISNeT service is to provide worldwide access to the EGNOS augmentation messages through the Internet, in real time, using the SISNeT protocol defined by European Space Agency (ESA) (see ref. ESA, 2006 and Web-7). Hence, through the EDAS SISNeT service, the EGNOS messages are available over the Internet even if the EGNOS GEO satellites are not visible from the user location.
The dissemination of the SISNeT messages is done using a dedicated protocol named DS2DC. This protocol (see Web-8) allows the transmission of SISNeT messages as text strings through the TCP/ IP protocol. The SISNeT protocol also allows the user to request specific messages to the server.
Actually, on top of the EGNOS augmentation messages, EDAS SISNeT service provides GPS ephemeris (RINEX format, see IGS, 2012) and ionospheric parameters of the Klobuchar model, which are delivered upon user request. For the case of the EGNOS messages, not only the last message may be requested, but also an already broadcasted one. For this purpose, the last 30 EGNOS augmentation messages of each message type are stored, to be delivered to the client in case the user requests them. This is especially useful for reducing the Time To First Fix (TTFT). The Time To First Fix for a SBAS receiver is the time period required to acquire the necessary satellite signals, navigation data, and SBAS messages to calculate a position solution. This TTFT can be significantly decreased by quickly obtaining the ephemeris of all the GPS satellites as well as the whole set of EGNOS messages. Note that some SBAS messages are broadcast with a low frequency (as is the case for ionospheric corrections) being necessary up to five minutes to start applying the augmentation information.

In order to connect to the EDAS SISNeT service, a SISNeT client is needed. Some client applications already exist, and even some receiver manufacturers support SISNeT. Details of the SISNeT Service, specific guidelines for the access and usage are available in the EDAS SISNeT-User Information Package (ESSP, 2012b) for registered users located at the EDAS section of the EGNOS User Support website.
FTP Service
One of the most important characteristics of EDAS is the real time provision of GNSS data. However, for a certain kind of users and applications, it is also useful to access archived GNSS data and EGNOS messages through an FTP server.
The EDAS FTP Service provides the following files to users:
• GPS and GLONASS mixed observation data received at RIMS sites and NLES stations in RINEX 2.11 format (IGS, 2012) at 1Hz and 1/30 Hz.
• GPS and GLONASS navigation data in RINEX 2.11 format (IGS, 2012) per station and consolidated.
• EGNOS messages in EGNOS Message Server (EMS) format (ESA, 2004) and RINEX B 2.10 format (IGS, 2007).
• EDAS Service Level 0 and Service Level 2 raw data.
• Ionosphere maps providing TEC information of the area monitored by EGNOS in IONosphere map Exchange format (IONEX) 1.0 format (Schaer et al., 1998).
Historical data for a period of 2 years will be available for all the files with the exception of the EDAS Service Level 0/2 raw data, which will be kept for a period of 6 months, starting from March 1, 2013.
EDAS users may access this service using a standard FTP client. Specific guidelines for the access and usage of the EDAS FTP service, including naming conventions and folder structure, are available for registered users in the EDAS FTP-User Information Package (ESSP, 2012a) available at the EDAS section of the EGNOS User Support website.
NTRIP Service
EDAS-based NTRIP service retrieves GPS and GLONASS raw measurements from the EGNOS stations (RIMS and NLES) and disseminates this information, together with DGNSS/ RTK correction, in real time through the NTRIP (version 2.0) protocol (RTCM, 2004) in RTCM 3.1 (RTCM, 2011), RTCM 2.1 (RTCM, 1994) and RTCM 2.3 (RTCM, 2001) formats. The EDAS Ntrip Service allows users to implement advanced positioning techniques such as Differential GNSS (DGNSS) and RTK (Real-Time Kinematic), which are able to provide sub-metre to centimeter level accuracy. Some examples of the achieved accuracies using the EDAS Ntrip Service to feed RTK and DGNSS algorithms are provided later in this paper (§3.2).
Ntrip is a Network Transport standard designed for disseminating of GNSS in RTCM format via Internet Protocol. EDAS Ntrip Service implements the protocol version 2.0 of the Ntrip standard (IGS, 2007), which uses RTSP (Real Time Streaming Protocol) for stream control on top of TCP and RTP (Real Time Transport Protocol) for data transport on top of the connection-less UDP. For an exhaustive list of the RTCM messages that are delivered through the EDAS Ntrip service, along with detailed information for the connection and usage of the EDAS NTRIP service, the EDAS NTRIP-User Information Package (ESSP, 2013e) is available for registered users.
In order to access the EDAS Ntrip Service, there are GNSS receivers that directly apply the DGNSS and RTK corrections coming from the NTRIP Caster, and there are also free applications that retrieve the data coming from the EDAS NTRIP Service, such as the BNC Client, available at Web-9.
EDAS Performances
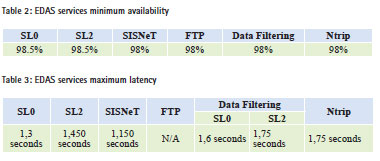
As explained before, EDAS, as all the other EGNOS Services, has its own EDAS SDD (see ref. ESSP, 2013c). Among other contents, the EDAS SDD defines the committed performances for EDAS (those that should always be met in a nominal situation) in terms of availability and latency:
• Availability: Percentage of time in which EDAS is providing its services according to specifications. The availability of EDAS services is measured at the EDAS system output (excluding external network performance).
• Latency: Time elapsed since the transmission of the last bit of the navigation message from the space segment (EGNOS and GPS/ GLONASS satellites) until the data leave the EDAS system (formatted according to the corresponding service level specification). EDAS latency is a one-way parameter defined for real time services.
Based on the above definitions, the tables below provide EDAS services’ minimum availability and maximum latency:
Please, note that latency is only defined for real-time services and in consequence, FTP Service does not have a latency requirement.
As an example, the performances for the last three months are shown below (monthly performance are available at the ESSP Website). As it can be easily seen, all services have met the minimum availability and maximum latency described in EDAS SDD.
EDAS Applications
Areas of applications
The Main Data Streams (Service Level 0 & 2) provide all EGNOS data for all EGNOS stations in real time and thus, have a wide range of areas of application. They are used for monitoring and research purposes. The data coming from the Service Levels can be used as input for the development of applications based on GNSS data or for the provision of added value services based on EDAS. They also provide EGNOS messages and therefore allow all kind of applications using EGNOS augmentation in real time.
The Data Filtering Service, since it provides a subset of the Service Level 0 & 2, can cope with the same use cases as the main data streams.
The SISNeT Service gives access to the wide-area differential corrections and the integrity information of EGNOS. Any user with Internet access (usually through wireless networks – GSM or GPRS) can access EGNOS messages through SISNeT, irrespective of the GEO visibility conditions. In consequence, GNSS receivers could improve accuracy with respect to GPS and even use the EGNOS protection levels in order to have an estimate of the navigation position error. An example of the accuracy improvement observed in a receiver located at Berlin using SISNeT with respect to GPS only is described in §3.2. Moreover, SISNeT can be used to analyse EGNOS SBAS messages in real time.
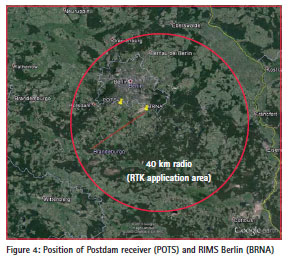
The NTRIP Service disseminates GPS and GLONASS measurements, DGNSS corrections and RTK messages from the EGNOS stations (RIMS and NLES) in real time through the NTRIP protocol, supporting wireless Internet access through Mobile Internet Protocol (IP) Networks like GSM, GPRS, EDGE, or UMTS, and allowing simultaneous PC, Laptop, PDA, or receiver connections to a broadcasting host. Using this service, GNSS receivers can improve accuracy of satellite-based positioning systems down to centimetre-level applying DGNSS or RTK techniques. On the one hand, DGNSS is based on the principle that receivers in the vicinity of the reference station will see similar errors on a particular satellite ranging signal. The DGNSS technique uses range corrections from a reference receiver (RIMS stations in the case of the EDAS NTRIP service) established at a known location and sent by the NTRIP Service to remove common satellite and signal propagation errors from the navigation solution. On the other hand, Real-Time Kinematic (RTK) uses phase measurements of the signal’s carrier waves of a reference station located in the vicinity (L1 and L2 for the case of GPS), in order to enhance the precision of position data derived from satellite-based positioning systems. It is noted that for the application of RTK, the receiver should be located close to an EGNOS ground station (approximately up to 40 kilometres) in order to achieve the expected precision. For the case of differential GNSS, DGNSS corrections are valid and can be applied within several hundreds of kilometres. §3.2 shows an example of the accuracy levels of a receiver located in Berlin area using DGNSS and RTK algorithms from EDAS NTRIP Service (coming from Berlin RIMS station). This NTRIP Service could support agriculture applications that require a stringent level of accuracy. Furthermore, this service can be used to monitor the performances of EGNOS stations.
Finally, the FTP Service can be used for research and investigation, performing post-processing of GNSS performances or analysing the atmosphere behaviour off-line.
Improvements in terms of accuracy
As an example of the added value of EDAS, the improvements in the accuracy using SISNeT and NTRIP Services will be shown with respect to a GPS standalone positioning solution.
The scenario uses the observation and navigation data from EDAS for the EGNOS ground station (RIMS) located at Berlin (Germany), computing the following results:
• GPS: The raw data coming from RIMS Berlin is used to compute GPS navigation solution.
• EDAS SISNeT: The raw data coming from RIMS Berlin and the EGNOS messages received by the SISNeT Service provide a SBAS (GPS+EGNOS) navigation solution.
• EDAS DGPS: The raw data coming from a receiver located at Potsdam (Germany) (16 kilometers away from the RIMS Berlin) and the DGNSS corrections coming from the NTRIP Service for RIMS Berlin are combined to compute a DGPS navigation solution at Postdam. It is noted that for this example only differential corrections from GPS are used, whereas GLONASS could be also used.
• EDAS RTK: The raw data coming from a receiver located at Potsdam (Germany) and the RTK corrections coming from the NTRIP Service for RIMS Berlin are combined to compute a RTK (Real-Time Kinematic) navigation solution at Postdam.
Figure 4 shows the location of the different elements comprising this scenario:
The raw data coming from the receiver located at Potsdam comes from the EUREF Permanent Network (see Web- 10), which is a European Network of more than 200 continuously operating GNSS reference stations. The solutions using DGNSS and RTK algorithms are provided by the Alberding GmbH’s DGNSS Monitoring system. Alberding GmbH (see Web-11), a satellite positioning company based in Wildau, Germany, is a leading developer and distributor of professional GNSS solutions, having experience in high-accuracy GNSS data processing, analysis and monitoring.
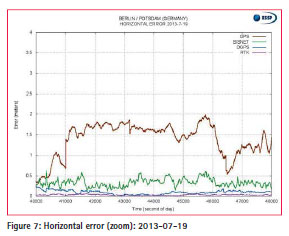
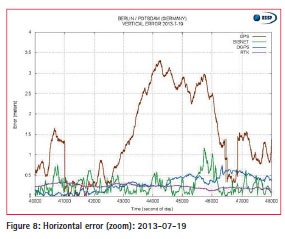
As a result, the horizontal and vertical errors using GPS, SISNeT, DGPS and RTK solutions are shown below for July 19, 2013 at Berlin station (for GPS and SISNET) and at Potsdam station (for DGPS and RTK), which is distanced approximately 16 kilometres from the RIMS Berlin.
Figures below represent a zoom of the above figures. In those charts it is observed that, in average, the horizontal and vertical errors using GPS navigation solution are clearly improved with the SISNET Service, applying the EGNOS corrections. Moreover, it is observed the highlevel precision obtained using DGPS and RTK, providing upto centimetrelevel accuracy.
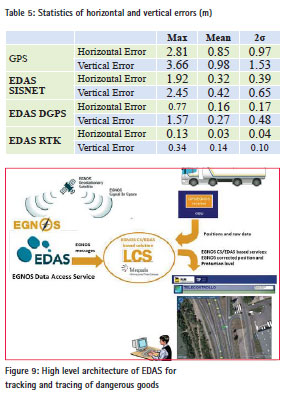
Finally, the maximum, mean and two sigma value are provided in Table 5 for each positioning solution, showing the improvement in terms of accuracy that the EDAS Services provide with respect to the GPS only navigation solution:
EDAS based commercial/ professional applications
Currently, there are several commercial applications that use EDAS Services. Some examples of applications and projects which have taken benefit from EDAS products are explained below.
EDAS for tracking and tracing of dangerous goods
EDAS is used for tracking and tracing dangerous goods. The solution is presently adopted by ENI (the leading Italian oil and gas company, also operating at international level), further to the validation carried out in a European Research & Development (R&D) initiative, the SCUTUM (see Web-12). Tankers transporting hydrocarbon by road in various European countries are equipped with tracking and tracing devices that use GPS, EGNOS and EDAS. The added value of EDAS is in the capability to provide higher position accuracy and availability and a guarantee on the position information, supporting a better control, the elaboration of more reliable statistics, and thus an enhanced risk management and prevention. The generated benefits are both commercial and social, thanks to an increased control and traceability.
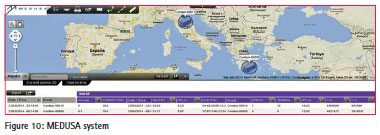
In the scope of the MEDUSA project, funded by the European Commission, the possibility to expand the added value that EGNOS and EDAS provide for freight transport applications to the Euromed countries is being investigated. The activities ongoing in the project include the development of a system for tracking & tracing freight containers using EGNOS and a demonstration/ proof of concept in the field. The latter consists on the tracking of a container from Italy to Jordan. The main project outcomes will be publicly presented at a workshop on the use of EGNOS OS/EDAS for freight transport/logistics/road/ITS applications in Amman (Jordan), on October 21, 2014.
GNSS Performance Monitoring
EDAS Services can be used for GNSS performance monitoring and analysis, using in real time messages via SL0, SL2, Data Filtering, NTRIP or SISNeT Services. For example, observation and navigation measurements can be obtained through the EDAS NTRIP services for each EGNOS stations and SBAS messages can be received from EDAS SISNet server. In particular, some Air navigation service providers (ANSPs) use applications based on EDAS to monitor the GNSS performances in -real time over the entire service area and at several specific airport locations. In addition, there are tools that supervise the RTK and DGNSS performances at specific locations in-real time using the EDAS NTRIP Service.
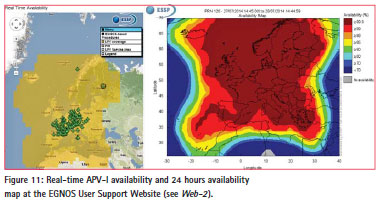
ESSP, as the EGNOS services provider, is also using EDAS SISNeT service as one of the data sources for the provision of the EGNOS real time performance information available at the EGNOS User Support Website (see Web-2).
EDAS for management of airport fleets
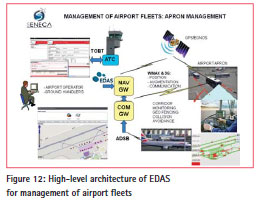
A large number of airport vehicles are moving in the airport apron to perform its services. An Apron Management System based on centralized EGNOS positioning and integrity computation and redundant wireless communication links has been developed within the SENECA project (see SENECA, 2013).
This application uses EDAS data in real time along with other techniques aiming at increasing the safety of the vehicles moving in the airport, increasing airport capacity in low visibility conditions and providing the Air Traffic Control with an accurate and updated estimate of the time when ground operations will be completed. Figure 12 shows the high-level architecture of this application.
EDAS based R&D Initiatives
There are some research and development initiatives that are analyzing the use of EDAS Services, that are presented below.
The EEGS2 project (see Web-13) aims to demonstrate through flight trials the benefits of EGNOS in areas of Eastern Europe where EGNOS Safety of Life is not yet available (see ref. ESSP, 2013d), and prepare the civil aviation authorities and navigation service providers of those areas for the future usage of EGNOS. During this project, EDAS data in real time were used to simulate a test SBAS system and to perform several flight trials (covering Moldova, Poland, Romania and Ukraine).
The GAIN (Galileo For Interactive Driving, see Web-14) project is oriented to road applications, aiming at developing the Enhanced Active Green Driving (EAGD) system for real time optimization and reduction of CO2 emissions and fuel consumption. GAIN will directly contribute to defining guidelines for the proper application of EGNOS/EDAS corrections in the transport domain.
The INCLUSION project aims to build a solution capable of providing motor-impaired persons with the possibility of improving their mobility in safe conditions. Using only a GPS signal is not sufficient to guarantee the required positioning performance because of its relatively poor accuracy and fading in urban scenarios. The aim of the CoVeL (Cooperative Vehicle Localization for Efficient Urban Mobility, see Web-15) project is to develop and commercialize the Lane Navigation Assistant (LNA) – an invehicle device which will enable lanelevel navigation and lane-level traffic management especially in urban areas. The LNA will use satellite positioning as its primary source, whereas these data will be augmented by correction information coming from the EDAS Service. The EGNOS data will be obtained from EDAS and broadcasted to the vehicles. The resulting lane-level vehicle positioning will bring navigation and traffic management to a new level of detail and effectiveness.
ERSEC project (see Web-16) is named as Enhanced Road Safety by integrating Egnos-Galileo data with on-board Control System. The general objective of the ERSEC project is concerned with the broadening of the scope of application to road transport of the EGNOS/ GNSS (and later Galileo), through an appropriate integration and data fusion with measurement data coming from other measuring instruments. More specifically, the objective of the project is to develop a measuring system, which will be used on board vehicles, that is able to produce the output of the position on the road map of the equipped vehicle and of all the obstacles.
The GNSSmeter Project (GNSS-based metering for vehicle applications and value added road services, see Web-17) developed a road pricing and pay per use insurance application system based on vehicle on-board technology that can be integrated rapidly to an existing market product. Currently, GPS is used as the primary positioning technology and is the key enabler of the existing system. Within GNSSmeter, the existing concept is extended by integrating EGNOS/EDAS augmentation data as well as Galileo measurements.
Conclusions
EDAS is the access point to the data collected and generated by the EGNOS ground infrastructure through the EGNOS stations network in real time and off line in form of an FTP archive. This EDAS Service has been officially available for GNSS community since July 2012, with a commitment of minimum availability of 98.5% for the main data services and of 98% for the rest of the EDAS Services.
EDAS data can be used in real time in order to enhance GPS accuracy performances. An example of a station located at Berlin (Germany) shows that the accuracy provided by GPS can be enhanced using the EGNOS messages coming from the EDAS SISNET Service. Also, implementing DGNSS or RTK techniques using the RTCM messages coming from the EDAS NTRIP Service, sub-meter to centimetre level accuracies can be obtained.
Finally, EDAS has already proven to be a versatile service, supporting professional users in different commercial applications, such as SBAS evolution programs, GNSS performance monitoring, tracking and tracing of dangerous goods and management of airport fleets. Other Research and Development activities continue to analyze the use of EDAS in new application domains, increasing the use of EDAS and supporting a wider range of application domains. For that, ESSP encourage EU citizens to take advantage of this European Service for their applications in order to enhance their performances
Acknowledgements
Firstly, the authors would like to acknowledge the efforts done by European Commission (EC) and the European GNSS Agency (GSA) for continuously supporting the EDAS program and for launching the evolution project which concluded in 2013 that included several enhancements to the EDAS support services and the addition of a new set of added value services.
Secondly, we would like to thank GMV for the good work performed in developing and maintaining the EDAS system and the continuous effort in order to improve the EDAS Services. The authors would like to acknowledge Tamás Horváth (Alberding GmbH) and Jürgen Alberding (Alberding GmbH) for their technical expertise and for developing of the DGNSS & RTK monitoring software that enables the computation and representation of the accuracy performances provided by the EDAS NTRIP Service.
In addition, the authors also recognize Antonella di Fazio (Telespazio), Antonio Maria Salonico (Telespazio), Ester Armengou (GSA) and Vincent Brison (GSA) for supporting this article and for the material provided.
References
ESSP, 2013b. “EDAS Client SW User Manual”, ESSPDRD- 6977 v2.2, 25/03/2013
ESSP, 2013c. “EGNOS EDAS Service Definition Document”, v2.0, 10/04/2013
ESSP, 2013d. “EGNOS Safety of Life Service Definition Document”, v2.0, 28/06/2013
ESSP, 2012a. “EDAS FTP Service – User Information Package”, v1.1, 10/04/2012
ESSP, 2012b. “EDAS SISNeT Service – User Information Package”, v1.0, 28/12/2012
ESSP, 2013e, “EDAS Ntrip Service– User Information Package”, v2.1, 12/07/2013
RTCM, 2011, “RTCM 10403.1 recommended standards for differential GNSS Services”, Version 3.1, 01/07/2011
ESA, 2004, “EGNOS Message Server (EMS) User Interface Document”, Version 2.0, E-RD-SYS-E31- 011-ESA 2.0, 26/11/2004
ESA, 2006, “SISNeT User Interface Document”, E-RD-SYS-31-010, Version 3, Revision 1, 15/05/2006.
RTCM, 1994, “RTCM Recommended Standards for Differential NAVSTAR GPS Service”, version 2.1, 25/01/1994
RTCM, 2001, “RTCM 10402.3 Recommended Standards for Differential GNSS Service”, version 2.3, 20/08/2001
RTCM, 2004, “RTCM 10410.0 Networked Transport of RTCM via Internet Protocol (Ntrip)”, version 1.0, 30/09/2004
IGS, 2007, “RINEX: The Receiver Independent Exchange Format”, Version 2.10, 10/12/2007
IGS, 2012, “RINEX: The Receiver Independent Exchange Format”, Version 2.11, 26/06/2012
Schaer S., Gurtner W., Feltens J., “IONEX: The IONosphere Map EXchage Format Version 1” 25/02/98
SENECA, 2013, “SENECA Program for GNSS in Civil Aviation, proceedings of 19th KA and broadband communications, navigation and Earth Observation conference, Florence, October 14-17 2013
Web sites:
Web-1: www.essp-sas.eu, consulted on July 17th 2014
Web-2: http://egnos-user-support.esspsas. eu/, consulted on July 17th 2014
Web-3: www.essp-sas.eu/ service_definition_documents, consulted on July 17th 2014
Web-4: www.egnos-portal.eu, consulted on July 17th 2014
Web-5: www.essp-sas.eu/ monthly_performance_reports, consulted on July 17th 2014
Web-6: http://www.itu.int/ITU-T/ asn1/introduction/index.htm, consulted on July 17th, 2014
Web-7: http://www.egnos-pro.esa. int/sisnet/publications.html, consulted on July 17th, 2014
Web-8: www.egnos-pro.esa.int/sisnet, consulted on July 17th 2014
Web-9: http://igs.bkg.bund.de/ ntrip/download, consulted on July 17th 2014
Web-10: http://www.epncb.oma. be, consulted on July 17th 2014
Web-11: http://www.alberding.eu, consulted on July 17th 2014
Web-12: http://www.scutumgnss. eu, consulted on July 17th 2014
Web-13: http://eegs-project.eu, consulted on July 17th, 2014
Web-14: http://www.gain-project. eu, consulted on July 17th 2014
Web-15: http://www.covel-project. eu/, consulted on July 17th 2014
Web-16: http://www.ersecproject. eu/, consulted on July 17th 2014
Web-17: http://www.gnssmeter.eu/, consulted on July 17th 2014












 (4 votes, average: 3.50 out of 5)
(4 votes, average: 3.50 out of 5)




Leave your response!