| LBS | |
Development and application of indoor/outdoor integrated location based service
By establishing complex indoor-and-outdoor integrative map models based on semantics and topology, standards and forms of data and production standard specifications of indoor-and-outdoor integrative maps have been worked out |
 |
|
 |
|
|
As smartphones with function of satellite navigation positioning become popular, the public can enjoy LBS very conveniently. However, the traditional LBS has been restricted outdoor over a long period of time, which can’t meet people’s needs to find the nearest service facilities and shops of certain brands or share indoor location with friends in a shopping center, etc. However, 80% of the activities in people’s lifeare conducted indoors, so there is an increasing demand for indoor LBS. A series of important documents issued domestically such as ‘Mid-and-long Term Development Plan of National Satellite Navigation Industry’, ‘The 12th Five-year Special Plan on Navigation and LBS Technological Development’ and ‘A Special Notice on Significant Application and Demonstration of Developing Beidou Satellite Navigation Industry’, all advocated developing indoor-and-outdoor LBS technology and products, building indoor-and-outdoor integrative LBS system, extending LBS’s service scope and improving LBS’s capacity through core technologies such as indoor map and indoor positioning.
The construction of LBS system which can be applied indoor is based on the synergetic development of indoor positioning technology and indoor geographic information technology. Currently, the indoor positioning technology is in its infancy. Achievements include local indoor positioning technology, such as Wi-fi positioning and RFID positioning, and the wide one, such as TC-OFDM. However, the corresponding indoor map technology is relatively backward. For this reason, China Siwei Surveying & Mapping Technology Co., Ltd. carried out key technology research of indoor-and-outdoor high-accuracy seamless navigation and positioning. The study is the representative achievement in industrial application of this research.
Achievements and shortcomings of domestic and foreign technological development
Achievements of domestic and foreign development
Currently, many domestic and foreign enterprises are carrying out research on indoor map technology and application and provide indoor LBS. Google, Nokia and other international representative LBS enterprises have made an attempt on high-accuracy mobile indoor navigation application. The mobile map service of Google Inc., provides indoor maps of large-scale malls and airports. In addition to the internal maps of buildings, a specific room can be searched and the route from the current location to the destination can be shown. Nokia’s Here map service can provide indoor map service in shopping malls, airports, transportation hubs and other facilities in 38 countries throughout the world. At present, domestically, Baidu, AutoNavi, Palmap+, Diandao, Rtmap and other enterprises have also launched independent indoor map products that make themselves independent applications upon the convergence of certain indoor places, or provided stand-alone service in mobile phone map service products. All theseprovide indoor LBS to industries with intensive indoor activities like business industries based on indoor maps.
Existing problems
Currently, all indoor map products have certain limitations that restricts the overall development of indoor LBS.
(1) The data and contents of indoor navigation are too simple with unitary form, and the acquisition and update of indoor high-accuracy data are unavailable. The main data source of indoor maps is plan sketch whosegeometrical figures are of relatively high difference and low accuracy, and the element attribute feature is of relatively poor verisimilitude.
(2) Indoor navigation data lacks unified format standards and specifications. Existing CityGML 3D urban general data modelconcentrates on data display and visualization when displaying indoor elements’ space and attribute, while indoor navigation data modelmainly focuses on indoor navigation and LBS, so it needs to establish indoor navigation map modeland lay out data standards and formats from the perspective of navigation and LBS.
(3) Indoor-and-outdoor maps are different with respect to data contents, display, accuracy and spatial reference. Indoor maps’ spatial location can hardly match outdoor ones. Indoor-andoutdoor maps are discontinuous, and indoor-and-outdoor integrative LBS, such as spatialization, route planning and guidance, can’t be achieved due to lack of integrative data model.
Overall design of indoor-andoutdoor integrative LBS system
Research goals and contents
In the research, we plan to establish a set of effective indoor-and-outdoor integrative data organization, and index ways and establish the basis of technical theories of indoor-and-outdoor integrative LBS by designing indoorand- outdoor navigation map model. By laying out indoor navigation map data standards, specifications, collection & manufacture of the technical process, we plan to research indoor navigation map manufacture tools and collect indoor map data to set up indoor-and-outdoor integrative data base. What’s more, we will develop LBS system and validate the feasibility of technological achievements with industrial application on such basis.
Overall structure of the system
Indoor-and-outdoor integrative LBS system is composed of technical support layer, function layer and interface layer, as shown specifically in Figure 1:
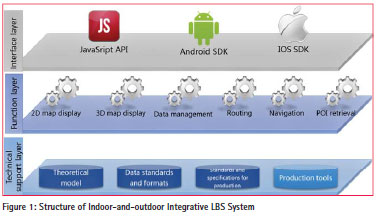
Technical support layer includes indoorand- outdoor in tegrative map theoretical model, technical standard system (data standards, formats, standards and specifications for production and manufacture) and production tools; function layer includes display of indoorand- outdoor integrative maps in 2D and 3D ways, data management, route planning, navigation, POI retrieval and so on; and interface layer is suitable for Web, Android and IOS. Key technical breakthrough, indoor-and-outdoor integrative map models, technical standard system, map production tools, 2D and 3D display engine, etc., will be introduced as follows.
Key technology of the system
Integration technology of Multisource heterogeneous data
Data organization and storage in indoor navigation system mainly involve vector data, multimedia data, etc. Vector data c onsists of in terest points and other index data, road topology data, indoor spacial unit, sectorization data, administrative division, spacial utilization, etc. Mu ltimedia data such as image, audio and video are related to specific space locations such as interest points and indexes, so multimedia data’s spatiality should be managed. The data obtained through various channels adopt different spacial reference standards, so semantics and coordinates should be transferred to unify space-time da tum. The project adopts collection at fixed time and locations, semantic superposition agreement, coordinate transfer error model, extraction of as sociation rule and other means to integrate multisource data through key technologies. Some key technologies are multisource road network data matching, automatic registration between POI and road network data, automatic correlation of semantic information with geometrical elements, setting data source extraction categories of various elements and specifying processing principles of situations, such as attribute in conformity and position relation contradiction.
Update technology of maps of crowdsourcing mode
Indoor data, mainly indoor spatial layout and feature information, is updated frequently. User data update agreement and collection specifications are defined based on UGC indoor map data collection, and update to support update iteration and progression of users’ location information differences. Indoor maps are divided into several classes and small files through incremental update technology and store them in the format of structurized data to update LBS system and realize quick rendering and retrieval when data changes.
Visualization representation technology of 2D and 3D integrative indoor maps
Through researching and developing 2D and 3D integrative indoor map engines innovatively, stories that displayed twodimensionally originally will now be displayed three-dimensionally to more intuitive display split-levelstructure, void structure and other structures inside large buildings. Thesein turn provide users with intuitive and real visual navigation and LBS. Regarding data structure, the original two-dimensional spatial data is integrated with the three-dimensional one, so that both displays and editing are completed within a unified data structure to ensure consistency and integrity of data.
Realization of indoor-andoutdoor integrative LBS system
Indoor-and-outdoor integrative map models
Indoor navigation data models, mainly providing indoor navigation and LBS, are supposed to support route planning, map display, route guidance and POI retrieval. Establishing indoor navigation map models should start from navigation and LBS.
The current project researches and improves the indoor map data model, namely composite model, that is a data modelbased on semantics. Its spatial information is expressed by entities, attributes and the relationship between entities and attributes. Based on topology, it’s a data modelwhosespatial connection between elements is expressed by the spatial relationship between entities and the network topology. The composite modeldefines the completed and exquisite standards for POI classification and coding standards of indoor maps, and supports the indoor panoramic and 3D extension. Users can customize map samples according to the classification and coding, which supports indoor panorama and three-dimensional extension. The indoor data contains the spatial information of elevation, and records the location and landform of inaccessible areas. Integrated with map matching technology, it can achieve high-accuracy indoor positioning and guidance as a map sensor. The modelconsists of road data, index data, background data, topological data and attribute data, jointly providing service for the navigation application. Elements are classified according to themes including index, channel, sectorization and spatial units. And a topology relationship is built between elements of channel, sectorization and spatial units, through which the relationship between index and channel, or that between index, sectorization and spatial units are stored.
Meanwhile, the traditional construction of planar road network fails to meet the needs of indoor navigation. Besides the planar connectivity, the indoor navigation electronic map needs to express th e connectivity of vertical transportation (namely the connection of vertical road network between stories), directionality of roads and tr avelrestriction information. Therefore, in order to meet the needs of indoor navigation, the topology of planar and vertical traffic integrative indoor spatial road network is supposed to be established towards planar road network and vertical road network through solving key problems, such as handling network connectivity, establishing network topology, specifying optimized-weighted elements of road network, inspecting road network and establishing stereoscopic road network.
Technical standard system
Based on the indoor map models, the current navigation data models are e xtended; standards and formats of indoor-and-outdoor integrative map data are established; Unified definition and convention have been given to the coordinate system, projection, data sheet, field specification, forms of expression, data classification, rendering specifications and physical storage formats, promoting unified storage and releaseof indoorand- outdoor navigation data, which are convenient for sharing and applying data.
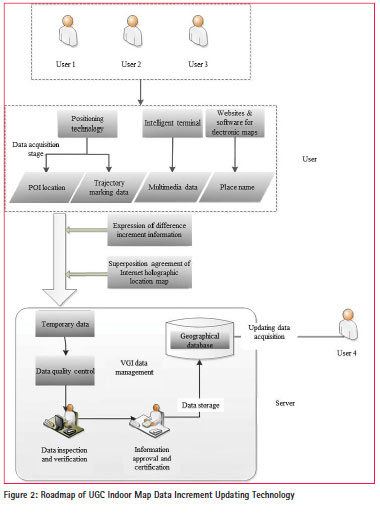
Meanwhile, a set of standards and specifications are established for indoor maps, and a detailed de scription has been given to spatial features, at tribute features and the spatial interrelations of navigation elements t hat provides the basis for field collection, data processing within industry and production of in door navigation electronic maps. Ro utes of map data increment updating technology are set up in the current project based on UGC, enabling users to complete updating geometric figures and at tribute contents of indoor maps with the assistance of mapping tools, as shown in Figure 2.
Map production tools
Compared with outdoor maps, indoor map production imposes higher requirements and quick changes, so convenient and easyto- useindoor map production tools are the premiseand foundation of producing, updating and maintaining indoor maps in batches. It’s particularly difficult for map producers to update and main tain indoor maps constantly, for indoor maps are diverseand complex, and change frequently.
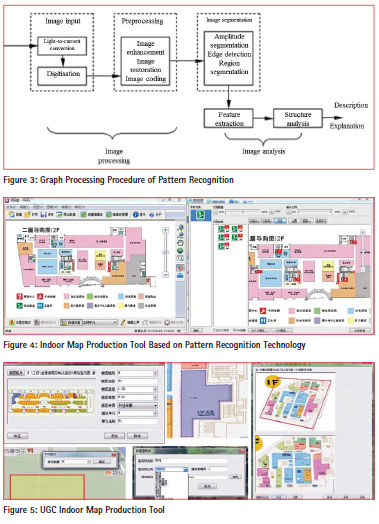
Map production tools adopt operation methods based on pattern recognition. Pattern recognition is widely used in image recognition, but indoor mapping is a relatively new application field for it. The process is specifically divided into several parts, namely, graph preprocessing, image segmentation, feature extraction, structure analysis, vector quantization, as shown in Figure 3.
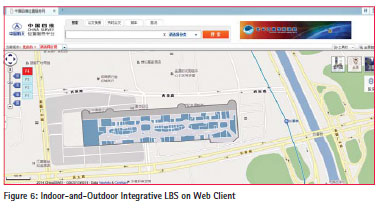
There are some demerits in collecting manually digitalized indoor navigation map, including the disunity between map/road network and the reality, big deviation in collection, high cost for inspection and long collection period. Map-making software based on pattern recognition technology (see Figure 4) is developed to improve the automation for map operators in map collection, diminish the deviation and reduce workload and increasemapping efficiency, thus making indoor mapping more standardized.
Based on the technological route, indoor map production technique and production tools have been developed (see Figure 5), which realizes indoor map production in the way of UGC.
2D and 3D map engine
The 2D and 3D integrative indoor map is conducted based on the extension of 2D indoor map. Its functions include data organization, data rendering, route navigation, formation of temporary object, data retrieval and so on. Through the data reading interface, the core layer transforms the data read from the data layer into its own data organizational structure. In this case, even if there is any change in the data structure of data layer, the 2D and 3D data can be wholly ren dered if the data reading interface is modified.
Meanwhile, the cross-platform application of 2D and 3D integrative indoor map engine has been realized. A set of underlying code can be compiled in different environments to meet application needs of various platforms, thus increasing code reuserate and development efficiency and diminishing error rate. The 2D and 3D integrative indoor map has visualizing functions like loading 3D indoor map, line of sight rotating around the central point by tilting 45 degrees up, translating the line of sight when sliding, POI turning toward the line of sight direction, zooming in & zooming out and turning around the central point and stereoscopic route planning, that are much better than thoseof 2D indoor maps.
Achievement test on system construction
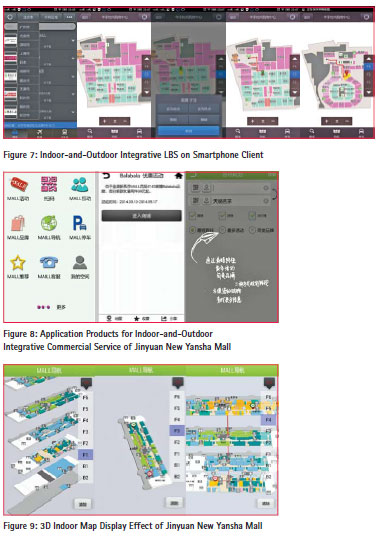
Currently through systematic development, the indoor-and-outdoor integrative map databaseon more than 100 important sites’ indoor maps has been formed. Thosesites include large commercial shopping malls and major transportation hubs such as railway stations and airports mainly situated in over ten big cities of the country like Beijing, Shanghai, Guangzhou and Shenzhen. The system provides indoor-and-outdoor integrative LBS for computers and smartphones, and supports such functions as indoor-andoutdoor integrative map display, POI retrieval and route planning (see Figure 6 and Figure 7).
In our country, there are about 4,000 large commercial shopping malls generally characterized by grand size, complex indoor layout, and constant change in stores and so on. The large commercial shopping malls are selected to be the application pilots for the indoor-and-outdoor integrative LBS, which serves as a demonstration for further commercial development. Therefore, Jinyuan New Yansha Mall, the largest monomeric shopping mall in Asia, is selected for demonstration for indoor LBS. The location-based services such as one-stop indoor navigation, delivery of preferential information from the mall, parking and locating cars are provided for users, and multiple one-stop services like instruction, shopping guide, propaganda, information, entertainment, new message, membership service are provided for malls, dealers and consumers (see Figures 8 and 9).
Conclusion
By establishing complex indoor-andoutdoor integrative map models based on semantics and topology, we worked out standards and forms of data and production standard specifications of indoorand- outdoor integrative maps. Some breakthroughs were also made in a few key technologies, such as integration of multisource heterogeneous data, update of maps of crowdsourcing mode and visualization of 2D and 3D integrative indoor maps, with which we developed effective map production tools and 2D & 3D map engines. Based on the above achievements, we successfully developed the indoorand- outdoor integrative location-based service (LBS) system and produced indoor-and-outdoor integrative map data on a large scale. Moreover, we conducted preliminary industrial application of the system in Jinyuan New Yansha Mall. The potential value of indoor-andoutdoor integrative LBS will be further explored through increasing usability, analyzing the information about the e-commerce based on the data, providing shopping malls and branding companies with business data analysis, business marketing and other service products.
References
[1] Special Overall Expert Group of Navigation and LBS in Navigation Expert Group of Earth Observation And Navigation Technology Field of Ministry of Science and Technology of China, White Paper of Indoorand- outdoor High-accuracy Positioning and Navigation, 2013
[2] General Office of the State Council of China, Mid-and-long Term Development Plan of National Satellite Navigation Industry, 2013
[3] Ministry of Science and Technology of China, The 12th Five-year Special Plan on Navigation and LBS Technological Development, 2012
[4] General Office of National Development and Reform Commission and General Office of Ministry of Finance of China, Special Notice on Significant Application and Demonstration of Developing Beidou Satellite Navigation Industry, 2014










 (No Ratings Yet)
(No Ratings Yet)





Leave your response!