| Surveying | |
The potential use of VGI data for 3D cadastre surveys
This study presents an evaluation of the current state of the art of algorithms and techniques used for 3D modelling and investigates the potential of their usage for 3D cadastre. We have presented this paper in two parts. In the last issue, the progress realated to utilize VGI data in visualizing the 3D world was published. The algorithms and techniques in 3D reconstruction which may be used to provide accurate and detailed 3D models were also discussed. In this issue, the potential of using VGI data in 3D reconstruction procedures, indicating the advantages and disadvantages of this approach is published, in addition to the potential of using VGI data for 3D cadastral surveys |
 |
|
 |
|
 |
|
VGI as a data source for 3D reconstruction
The VGI approach to photogrammetry poses additional challenges, because the data are not recorded according to photogrammetric requirements. While contemporary software can deal with difficulties like unknown and varying focal length, lighting changes, and incompatible images (images of different scale), a number of common problems remain.
Many amateur digital cameras (including those on cell phones) have a cheap, consumer-grade single-frequency GNSS receiver, and sometimes the GNSS coordinate at the time of taking the picture is stored as metadata in the image’s EXIF header. These coordinates, sometimes referred to as geo-tags, are currently not available for the majority of images and they are not accurate enough to be used directly – errors in some cases exceed 10 m. But, just like the approximate focal length that is also often part of the metadata, they are good enough as initial values, and can constrain the problem sufficiently to overcome some of the problems mentioned above (Hartmann et al., 2016).
Camera pose estimation and 3D reconstruction from arbitrary, uncontrolled images has reached a certain maturity, as evidenced by several open-source and commercial software packages (e.g., Bundler, VisualSFM, Pix4D, Acute3D, Agisoft PhotoScan). Nevertheless, a number of important open problems remain, which is the reason that crowdsourced photogrammetry has not yet been widely adopted for surveying purposes. The main issues in our view are: (i) more often the models are incomplete and show only some of the sides of a building or scene; (ii) repetitive structures and symmetries lead to incorrect correspondences and gross errors (e.g., missing parts) of the 3D models; and, (iii) even if several useful parts of a larger scene have been reconstructed correctly, the models are not geo-referenced with appropriate accuracy. In order to overcome the abovementioned problems, Hartmann et al. (2016) proposed a method for the creation of geo-referenced 3D models using images from Flickr, which has been the major data source for crowdsourced photogrammetry. As a first step, the dataset divided into smaller clusters, using VocMath method (Havlena & Schindler, 2014), which provide the set of images from each camera pose. The small, clean clusters are individually reconstructed using a SfM software (Bundler) (Snavely et al., 2008). Each of these models represents a part of the same landmark. The GNSS coordinates from the EXIF headers of the images are exploited to perform a coarse absolute orientation. For the absolute orientation between the partial 3D models, Hartmann et al. (2016) proposed to go back to the models and find corresponding 3D structure points for a better alignment. The point-to-point correspondences identified using the standard SIFT algorithm. Finally, the geo-referenced 3D model derived after a bundle adjustment, so as to fuse all available information. Also, similar research has been performed over time (Hadjiprocopis et al., 2014; Somogyi et al., 2016).
Jeong & Kim (2016) proposed a planar fitting-based semi-automatic reconstruction process using smart devices, such as smartphones. The proposed methodology was developed as a mobile application for Android, and requires from user to obtain two images of the target building from two different perspectives, so each one of them may display a different side of the building and have a sufficient overlapping part. After the selection of the boundaries of the Region Of Interest (ROI) on the mobile device screen from the user, the creation of the 3D reconstruction is performed by means of the estimation of 3D surfaces function for each building side. Following, the two resulting surfaces are adapted to both surfaces of a cube. This stage is necessary to reduce errors due to some erroneous correspondences and the angular errors introduced in the process. Zhang et al. (2016) suggests a solution to complete building reconstruction of both rooftops and façades by combining aerial-borne LiDAR point clouds and ground image point clouds generated from smartphone images, using region growing method (Segmentation based Method). First, the smartphone images are clustered by GPS data obtained from image metadata (EXIF data). Every building is reconstructed by Structure from Motion (SfM) and Patch-based Multi View Stereo (PMVS) algorithms from a clustered smartphone image set (Furukawa & Ponce, 2010; Furukawa & Hernández, 2015). The corresponding LiDAR point cloud is extracted by using the GPS data and the image pointing information obtained from the clustered image set. Building LiDAR points are segmented to possibly different individual buildings after processing by a regiongrowing algorithm on the building point class. Following this stage, two forms of top view 2D outlines of target building are respectively extracted from LiDAR point cloud and ground image point cloud. In order to accurately integrate the LiDAR point cloud and ground image point cloud, they adopt the Coherent Drift Point (CPD) algorithm to match building outlines extracted respectively from LiDAR point cloud and ground image point cloud. The proposed methodology is applied to one building at a time. In the future, it is expected to be applied on a larger scale.
Occasionally, several different research approaches aim at the partial or fully 3D reconstruction of buildings utilizing crowdsourced data are proposed. These investigations concluded that the use of crowdsourced data may lead to satisfactory results, constituting an important part of the 3D reconstruction. Nevertheless, it is obvious that data collected through VGI contain noise and occlusions; so photogrammetric building reconstruction may be difficult using exclusively these row data. The presence of occlusions requires sophisticated techniques and algorithms for data processing, and may thus lead to erroneous reconstructions. The implementation of Data-driven techniques and algorithms for the development of 3D models for cadastral purposes (3D cadastre) requires especially high computational costs in order to reduce as much as possible the imported errors. However, the 3D cadastre may aim at preserving property rights, without being interested in architectural details of property geometry. Instead the key elements of interest may be the volumes of the buildings (in LOD1 or LOD2), so that the individual properties can be correctly registered. For this reason, the use of Model-driven approaches may be preferable, since they are characterized by higher stability, maintenance of the topology, while offering an easy way of 3D reconstruction which can be adopted by ordinary citizens without specific photogrammetric skills.
The potential use of VGI data for 3D cadastre surveys
While the activities of the various VGI communities has not substantially changed the way bodies such as National Mapping Agencies (NMAs) produce data, change in the future is anticipated (Foody et al., 2015). As cities expand vertically, safeguarding of tenure requires a clear 3D picture in terms of property rights, restrictions and responsibilities (RRR). However, the Land Administration Model (LADM ISO 19152) provides only an international generic framework for cadastres and there are still several aspects that need to be investigated and improved (Oldfield et al., 2016).
A 3D cadastre system should enable archiving, visualization, queries and analysis of 3D structures on different temporal time-stamps. Until now, 3D systems focus on 3D modelling of physical real-world objects (building), without paying much attention to their multi-dimensional implementation (Jaljolie et al., 2016). One of the costliest phases of the implementation of 3D cadastres, is the initial 3D data capture. In order to overcome this difficulty and establish 3D cadastres, the minimization of the financial and human resources is required. In developing countries lowcost and existing sources of data should be leveraged. With low-cost sensors and cameras which are often available in today’s smartphones, the acquisition of 3D data becomes possible for a wider audience, such as citizens. This allows, for example, the reconstruction of 3D objects based on 2D images taken by low-cost sensors (Uden & Zipf, 2013). This may complement the data collection procedures of the property rights information so as the property’s geometric information. Moreover, for the implementation of 3D cadastres, 3D data collected in other areas (BIM, IFC CityGML files, IndoorGML, InfraGML and LandXML) can be used for the creation of a 3D cadastral database (Dimopoulou et al., 2016). In this way photogrammetric expertise may contribute by submitting or uploading 3D models in a specially constructed 3D cadastral database.
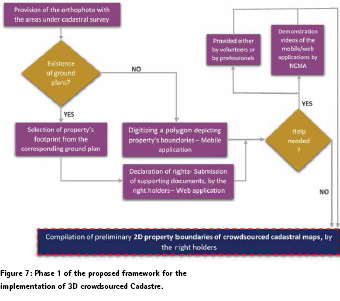
Ideally a platform for the storage of 3D building models and the corresponding cadastral information should be developed. The cadastral surveys may be conducted in two different phases. In Phase 1 (Figure 7), right holders may be asked to collect and submit information about their own properties, as proposed from our previews work (Apostolopoulos et al., 2015; Gkeli et al., 2016) for the implementation of 2D cadastre. As basemap a recent orthophoto depicting the area under cadastral survey, ovelayed with buildings ground plans (if exist any) can be used. Otherwise the demarcation of property boundaries can be conducted by the right holders at real-time on the basemap, using a cadastral mobile application where properties are clearly recognized. Αn example of such mobile application is the BoundGeometry application, which is developed by the authors and succesfully used in different areas of interest (Apostolopoulos et al., 2015; Gkeli et al., 2016) (Figure 8). The registration of supporting documents and additional information proving their rights, may be done through a web application. If the right holder is unable to use any of the applications he/she may request assistance. Α person who may manage the applications, a local trained volunteer, a local professional surveyor may help the property owner. Also, demonstration videos with detailed instructions for how to use both applications may be provided to the right holders. By the end of this phase (1), a draft crowdsourced cadastral map may be produced.
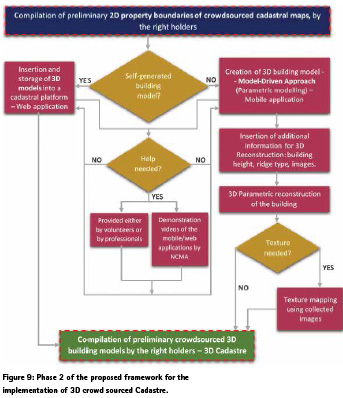
In Phase 2, right holders will be asked to create or import into the platform the 3D models of the properties they have rights on (Figure 9). The commencement of this process begins after the selection of building footprint by the property owner, as declared in phase 1. With the selection of building footprint on the basemap, the collection of the respective coordinates and the building properly georeferencing is conducted. If the right holder has photogrammetric skills or he/she has 3D data collected for another application (BIM, IFC CityGML files, etc.) can contribute by creating and/or uploading 3D models in a 3D cadastral database through a specially constructed web application. If the right holder is not a photogrammetric expertise, the development of 3D models can be done utilizing parametric methods, such as discussed in chapter 3, as they constitute an easy, user-friendly and robust reconstruction process. The parametric modelling may be done through a mobile application. Using the Model-driven approach, the right holder can select the building parts from a predefined building library, and place them over the corresponding building footprint. For this reason, additional data, such as building height and ridge type, has to be entered in the mobile application in order to conclude in a successful scaled reconstruction. In addition, the right holders can take pictures using the mobile application, in which all the details of the building geometry are presented. Using these images, if is necessary, the creation of textured 3D models is possible. If the right holder is unable to use any of the applications he/she may request assistance as reffered in phase 1. By the end of this phase (2), crowdsourced 3D building models may be produced, for the initial implementation of 3D cadastre.
There are many investigations referred to different available tools in the innovative field of 3D-VGI, which can be exploited and inspire researchers in order to use the advantages of VGI data for the fast, economic and reliable implementation of a EU desired 3D cadastre (Over et al., 2010; Fan & Zipf, 2016; Uden & Zipf, 2013; Eaglin et al., 2013; Hadjiprocopis et al., 2014; Somogyi et al., 2016; Hartmann et al., 2016; Jeong & Kim, 2016; Zhang et al., 2016). Therefore, it is evident that VGI data have much potential for supporting 3D cadastre surveys and may be involved in the development processes of a 3D cadastre. Leveraging VGI data along with existing reconstruction methods (Neo-photogrammetry: Leberl, 2010), an innovative and effective framework may be produced, in an economical, easy and efficient way, wherein citizens and particularly the property owners will have a decisive role.
Conclusions
The establishment of a 3D cadastral information system aims to support government administration to provide an efficient and transparent system which can manage modern urban reforms. Two-dimensional registration of existing cadastre systems has to be improved in order to manage more complex areas with multiple levels of right. A cost effective solution is required for the initial implementation of a FFP 3D cadastre. With low-cost sensors and cameras, which are often available in today’s smartphones, the acquisition of 3D data becomes possible for a wider audience, such as the occupants and right holders. Leveraging VGI data along with existing reconstruction methods, an innovative and effective framework may be produced, in an economical, easy and efficient way, wherein property owners will have a decisive role. Through proper training and education of property owners together with the development of innovative techniques and algorithms for data processing and development of 3D models, the reliability of cadastral surveys increases. Thus, utilizing crowdsourced data an affordable, usable, reliable and functional procedure for the compilation of 3D cadastral surveys may be designed.
Acknowledgements
The contribution of Maria Gkeli to this research is part of her PhD dissertation, which is supported by the Onassis Foundation scholarship program.
References
Apostolopoulos, K., Geli, M., Petrelli, P., Potsiou, C. & Ioannidis, C., 2016. A new model for Cadastral Surveying using Crowdsourcing. Survey Review, 12 p., do i:10.1080/00396265.2016.1253522.
Eaglin, T., Subramanian, K. & Payton, J., 2013. 3D modeling by the masses: A mobile app for modeling buildings. In: Pervasive Computing and Communications Workshops (PERCOM Workshops), 2013 IEEE International Conference, pp. 315-317.
Fan, H. & Zipf, A., 2016. Modelling the world in 3D from VGI/Crowdsourced data. In: Capineri, C, Haklay, M, Huang, H, Antoniou, V, Kettunen, J, Ostermann, F and Purves, R. (eds.) European Handbook of Crowdsourced Geographic Information, pp. 435–446, London: Ubiquity Press.
Foody, G.M., Mooney, P., See, L., Kerle, N., Olteanu-Raimond, A-M & Fonte, C.C., 2015. Current status and future trends in crowd-sourcing geographic information. Working Paper of COST Action TD1202, University of Nottingham, 6 p. Furukawa, Y. & Hernández, C., 2015. Multi-view stereo: A tutorial. Foundations and Trends® in Computer Graphics and Vision, vol. 9(1-2), pp. 1-148.
Furukawa, Y. & Ponce, J., 2010. Accurate, dense, and robust multi-view stereopsis. In: IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 32(8), pp. 1362–1376.
Gkeli, M., Apostolopoulos, K., Mourafetis, G., Ioannidis, C., & Potsiou, C., 2016. Crowdsourcing and mobile services for a fit-for-purpose Cadastre in Greece. In: Fourth International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2016), SPIE, vol. 9688, 17 p., doi:10.1117/12.2240835.
Hadjiprocopis, A., Ioannides, M., Wenzel, K., Rothermel, M., Johnsons, P. S., Fritsch, D. & Weinlinger, G., 2014. 4D reconstruction of the past: the image retrieval and 3D model construction pipeline. In: Second International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2014), International Society for Optics and Photonics, vol. 9229, 16 p., doi:10.1117/12.2065950.
Hartmann, W., Havlena, M. & Schindler, K., 2016. Towards complete, georeferenced 3d models from crowd-sourced amateur images. In: ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. III, pp.51-58.
Havlena, M. & Schindler, K., 2014. VocMatch: Efficient multiview correspondence for structure from motion. In: Computer Vision — ECCV 2014: 13th European Conference, Zurich, Part III, pp. 46-60.
Jaljolie, R., Oosterom, P. & Dalyot, S., 2016. Systematic Analysis of Functionalities for the Israeli 3D Cadastre. In: 5th International FIG 3D Cadastre Workshop, Athens, Greece, pp. 447-472.
Jeong, J. & Kim, T., 2016. Semi-automatic building models and façade texture mapping from mobile phone images. In: ISPRS International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. XLI-B3, pp. 613-616.
Karantzalos, K. & Argialas, D., 2009. A regionbased level set segmentation for automatic detection of man-made objects from aerial and satellite images. Photogrammetric Engineering & Remote Sensing, vol. 75(6), pp. 667-677.
Oldfield, J., Oosterom, P., Quak, W., Veen, J. & Beetz, J., 2016. Can Data from BIMs be Used as Input for a 3D Cadastre? In: 5th International FIG 3D Cadastre Workshop, Athens, Greece, pp. 199-214.
Over, M., Schilling, A., Neubauer, S. & Zipf, A. 2010. Generating web-based 3D City Models from OpenStreetMap: The current situation in Germany. Computer Environment and Urban System (CEUS), vol. 34(6), pp. 496–507.
Snavely, N., Seitz, S. and Szeliski, R., 2008. Modeling the world from Internet photo collections. International Journal of Computer Vision (IJCV), vol. 80(2), pp. 189–210.
Somogyi, A., Barsi, A., Molnar, B. & Lovas, T., 2016. Crowdsourcing based 3d modeling. International Archives of Photogrammetry, Remote Sensing & Spatial Information Sciences, vol. 41-B5, pp. 587-590.
Uden, M. & Zipf, A., 2013. Open building models: Towards a platform for crowdsourcing virtual 3D cities. In: Progress and New Trends in 3D Geoinformation Sciences, pp. 299-314, Springer Berlin Heidelberg.
Zhang, Z., He, J.N., Huang, S. & Duan, Y., 2016. Dense Image Matching with Two Steps of Expansion. In: ISPRS International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, vol.41, issue B3, pp.143-149
The paper was presented at FIG Working Week 2017, Helsinki, Finland, 29 May – 2 June 2017











 (9 votes, average: 4.33 out of 5)
(9 votes, average: 4.33 out of 5)




Leave your response!