| Geodesy | |
On module framework of VieVS and data processing for teaching and research
VieVS is a new software for VLBI data processing, which has been a great help for research of Space Geodesy. Various solution modules and corresponding principles were introduced, steps were introduced for sake of experiment, and is may be helpful for teaching and research on VLBI data processing. |
 |
|
 |
|
VLBI plays a unique role in the practical realization and maintenance of the International Celestial Reference Frame (ICRF) and International Terrestrial Reference Frame (ITRF), it is also the only technique which provides the full set of Earth Orientation Parameters (EOP)[1]. Thus NGS format VLBI data processing is crucial. Previously, VLBI data processing software was mainly for OCCAM. However, duo to OCCAM being unable to adapt to the new international standards or update itself slowly, it now can’t handle the current VLBI data. VieVS, a new software for VLBI data processing, was developed by Johannes Bohm, Schuh Harald of Geodesy and Geophysics Institute, Vienna University of Technology. VieVS is written in MATLAB language and it meets the IERS meeting that recommended the latest computing model. The latest version of VieVS is version 2.2.
Main features of VieVS
Compared to OCCAM, VieVS in NGS format VLBI data processing has the following new features. These features make VieVS more competent in data processing tasks of VLBI.
1) The software is made fully consistent with the latest IERS Conventions (e.g., non-rotating origin and the corresponding partials for the nutation parameters).
2) It estimates the parameters as piece-wise linear offsets at integer hours, which makes the results more comparable with those from other space geodetic techniques like GNSS and SLR.
3) VieVS has GUI interface, the parameters can be set intuitively and MATLAB language makes VieVS more open. Users can modify corresponding code according to their needs.
4) VieVS has a ‘batch’ mechanism and select ‘Save + Run’ option in the user interface. You can perform batch processing of data without having to write your own ‘batch’ script, which greatly improves user productivity.
5) VieVS have a strong ‘capacity expansion’. When the VLBI station or VLBI observations of radio sources change, you can create your own corresponding Superstation files and Supersource files to calculate, without waiting for software updates. VieVS also allows users to add external ionosphere and troposphere data files.
VieVS module calculations and principles [3-6]
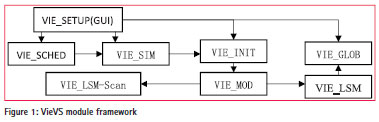
VieVS is composed of a plurality of modules. Fig. 1 shows the correlation between the VieVS each module, which also shows the whole of the operational flow of VieVS.
VIE_SETUP module
The purpose of this module is to provide a GUI interface for all computing modules of VieVS, allowing users to select the appropriate options and parameters. It reads Superstation.mat and Supersource. mat files, creates process_list.mat file for observation sequence which will be processed, and creates Runp. mat file to gather critical information of processing in WORK directory. It creates a parameter file for each processing sequence at DATA/LEVEL0 directory. E.g., 14AUG12XA_N004_ parameter.mat, this means the treatment of NGS format observation sequence parameter file of August 12, 2014.
VIE_SCHED module
The first observation of a radio source known as a scan, scan length is calculated as follows:
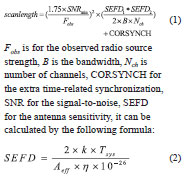
where k is Boltzmann’s constant, Tsys for the system temperature, Aeff for the effective collecting area of the antenna and η is the processing factor. This module is used to monitor the effectiveness of the resulting scan, read the directory system files (.cat files) and local control file (.txt files). Among them, the directory system files include source.cat, flux. cat, antenna.cat, modes.cat, freq.cat, hdpos.cat, et al. The local control files include param.txt, down.txt, snrmin. txt, psource.txt, tagalong.txt, et al. For specifications of these files, please refer to the literature [5]. The NGS files of output are used to estimate the parameter, schedule file (.skd files) for real-time VLBI calculation, summary file for all aspects of the preliminary estimate of schedule, trf_sched.txt document for solving the station location and crf_sched. txt file for solving radio source position.
VIE_SIM module
The three most important stochastic error sources in VLBI are zwd (troposphere zenith wet delay), station clock and measurement error. VIE_ SIM module can be established for each epoch least-squares adjustment of the vector equation o – c (observed value minus the calculated value), the vector o – c is calculated as follows:
![]()
Where zwd1, zwd2 respectively for troposphere zenith wet delay, mf (el) is mapping function (elevation), clk is station clock, wnbsl for the white noise per baseline, o – c produces artificial delay observation, favors testing new scheduling policy, the impact of the geometry of different network stations, antenna specifications and system effects. Read NGS format data and estimation parameters at DATA/ TURB directory. Output scheduling test file, null file, application/omit valid documents which should be tested.
VIE_INIT module
This module reads data from observations NGS file, read the coordinates and velocity data from stations Superstation. mat file and read the radio source coordinates from Supersource.mat file. The outliers will be removed to a specified Outlier folder. These outliers include stations, radio sources, baselines; etc. Height cut-off angle will be introduced. Operation produces structural sequence of scan, antennas and radio sources. E.g.14AUG12XA_N004_scan.mat, 14AUG12XA_N004_antenna.mat, and 14AUG12XA_N004_source.mat. These structural sequence files will be stored in DATA/ LEVEL0 directory. VIE_MOD module According to the structure of the sequence generated by VIE_INIT, VIE_MOD module establishes a theoretical time delay and partial derivative, which is

VIE_LSM module
VIE_LSM module uses the principle of least squares to estimate the corresponding parameters of the earth from VLBI observations, the adjustment of all parameters are based on PWLO (piecewise linear compensation). Principle is as follows:

After VIE_LSM calculation, ‘clock break’ can be corrected and some unusual observations can be surveyed. PWLO estimates of VieVS are in a good agreement with those from other space geodetic techniques. VIE_LSM module provides SINEX input and datum free normal equations for global solutions in DATA/LEVEL2 directory. This will be used by VIE_GLOB for global solution.
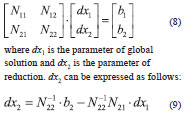
VIE_GLOB module
VIE_GLOB module has the capability to estimate parameters that are common to all VLBI sessions from a so-called global solution. Reduction and stacking of parameters will be applied here. It is based on a division of the normal equation system into two parts. In the first part those parameters are concentrated, which will be kept in the global matrix, and in the second part parameters are ordered, which will be estimated only from a single session:
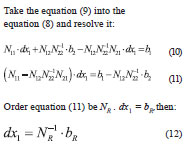
Therefore, global solution parameters solver out, and result will be stored in globsol_TEST_LEVEL2.mat file at OUT/GLOB directory.
Steps of examples solution and attentions
In this paper, November 3, 2014 was a single day of XE VLBI data type NGS format solver for example. The 14NOV03XE_N004. NGS file was the input.
Examples solution
In the Scheduling menu parameter settings: Select VLBI2010 for the station network, set ‘session start’ for November 3, 2014. Height cut-off angle, minimum angular distance and other parameters are set to default values. In the Simulation menu, select cont05_turb_04.dat for the analog parameter file, select slant wet delay, delay and white noise for the simulation parameters. In the Parameter menu, select vtrf2008 for the terrestrial reference frame Superstation file, select icrf2nonVcS for the celestial reference frame Supersource file, ephemeris chosen JPL_421, the mapping function is selected VMF1 type and the observed values of the Quality code limit constraint is set to a value greater than number 9, where it is set to 10.
In Run-> VieVS estimate settings, choose ‘Run first solution’, so that you can reduce the large clock error from the observed value and repair ‘clock break’ problem [7]. The new singular value files will be placed in the Outlier directory. Introduce NNT (Not Net Translation) and NNR (No Net Rotation), two state equations to the estimation of the station coordinate adjustment. Three conversion parameters and translation parameters between priors and adjusted value will be zero.
Figure 3 shows the observation sequence solver of residual plot. It can be seen from the figure in red epoch that the residuals are relatively large. But most are concentrated in the residuals between (-2-2) cm, indicating that the observed data is quite reliable.
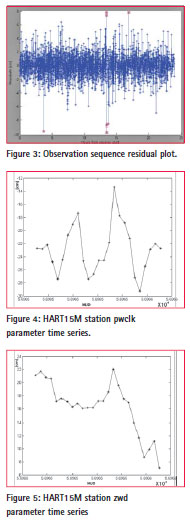
Figure 4 and Figure 5 respectively show time series of pwclk (piece-wise linear clock) and zwd (zenith wet delay), two parameters of station HART15M at this observation sequence. Pwclk parameter is shown in Figure 4. It swings up and down in the value -22, fluctuations between the unit of 16. This shows that the clock error is swimming up and down, in line with the trend of white noise time series. Figure 5 shows the zenith wet delay parameter time series and can be seen from the first drop of wet delay which rose rapidly. The last straight decline is consistent with the result of official online publication of IVS.
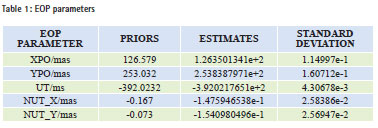
Table 1 shows the priori values and estimated values of the five parameters of EOP, and the corresponding standard deviation. As can be seen from the table, the difference between the priori values of the five parameters and estimated value is very small, less than 1mas. This shows that VieVS calculation accuracy is very good.
Attentions
1) Before running VieVS, you need to update the time-series of atmospheric non-tidal loading correction for station coordinates, the mapping function VMF1 file and EOP parameter file. Do ensure the latest VLBI data is calculated.
2) When you run VIE_SIM module, do not use any of the outlier documents to ensure quality code>9, which is very important for all the observed values for analog simulation.
3) If you cannot read the pressure and temperature data stations in the NGS file system, perform automatic calculation with GPT2 (Global Pressure and Temperature model 2) Data.
Conclusions
VieVS as a new VLBI data processing software, which has many new features. Its interface technology, the solver module ‘scalability’ and automatic ‘batch’ makes VLBI data processing become more simple and efficient.
This paper uses VieVS to solve NGS format data of VLBI. The numerical experiment shows its advantages and applicability. Its calculating results are consistent with IVS posted results. It will bring some inspiration for the teaching and using of VieVS.
Acknowledgments
versity of Technology for providing the software of VieVS and the IVS for providing the data. This research was funded by the national ‘863 Project’ of China (No. 2008AA12Z308) and National Natural Science Foundation of China (No. 41374012).
References
[1] Zhenghang LI, Erhu WEI, et al. Space Geodesy[M], WUHAN: WUHAN UNIVERSITY PRESS, 2010.
[2] J. Böhm��S. Böhm��T. Nilsson��et al. The New Vienna VLBI Software VieVS [J]. Springer Berlin Heidelberg, 2012,136 (7):1007-1008
[3] Yuanfei Li, Weiming Zhen. Software related data processing methods [J]. Annals of Shanghai Observatory, Chinese Academy of Sciences, 2004(5): 151-153
[4] Niell A, et al.VLBI2010: Current and Future Requirements for Geodetic VLBI systems. IVS Memorandum 2006-008v01, 2006.
[5] L Plank, J Böhm, H Schuh, et al. First steps of processing VLBI data of space probes with VieVS. http:// www.hg.tuwien.ac.at/Bibl_Docs/ Papers/2011/2011_EVGA_Plank_pa.pdf
[6] Kikuchi F,et al.VLBI Observation of NarRow Bandwidth Signals from the Spacecraft[J].Earth Planets Space,2004,56:1041-1047
[7] Spicakova, L. Plank, T. Nilsson, J. Bohm, and H. Schuh. Terrestrial reference frame solutions with the Vienna VLBI Software VieVS. In: Proceedings of the 20th EVGA Meeting in press (this volume), 2011











 (7 votes, average: 4.29 out of 5)
(7 votes, average: 4.29 out of 5)




Leave your response!