| Geodesy | |
TUSAGA-Aktif and WEB-based online PPP Services: A case study in ÇORUM
The results show that Network-RTK provides cm level accuracy, whilst PPP-derived coordinates converge to the results evaluated by relative technique with cm to dm level of accuracy |
 |
|
 |
|
 |
|
 |
|
 |
|
Positioning with GPS can be categorized into two broad groups: absolute (single point positioning) and relative (or differential) positioning. In 2000s, the Selective Availability was turned off and their users could obtain his/her position within a few meters level of accuracy with a GPS receiver in standalone mode. However, this accuracy is not sufficient for applications that require higher accuracy level. The most common way to increase the accuracy is to use differential methods which require at least two GPS receivers, one is reference and the other is rover. This approach requires relatively long occupation time/timecost field and office work. Furthermore, users need to be familiar with postprocessing software in order to process the collected GPS data, and in general the software is not free and processing requires knowledge of complex background about GPS techniques.
Depending on the improvements in the world of technology, different algorithms and some new approaches have been developed to obtain more accurate positioning, either absolute or relative positioning. One of them is Network RTK and it was established and used extensively in several countries, while producing economical and rapid solutions. All differential methods including network-based RTK need additional data from reference stations. Although the technique has several advantages with respect to conventional differential and RTK methods, it has some drawbacks as given below:
• The distance between the rover and its reference (base) station should be about 50-100 km (max.),
• Expensive GPS receivers with Network RTK capability are required,
• Data communication is essential (Zhizhao et al. 2013; Rizos, 2008; El-Rabbany, 2006).
Nowadays, Continuously Operating Reference Station (CORS) is the most widely applied method in Network-RTK (Rizos et al., 2012). In CORS Networks, the errors occurred in measurements were counted and current coordinate corrections were broadcast in real time to the users (Rizos, 2008). Users of the system can obtain real-time coordinates with a few centimeters level of accuracy (Weston and Schweiger, 2010).
Over the past decade, a number of techniques have been discussed in the literature to improve the positioning accuracy by using a single GPS receiver. One of the commonly used methods is Precise Point Positioning (PPP). Using the precise orbit and satellite clock corrections, the PPP method provides cm to dm positional accuracy without the use of base station(s) in both static and kinematic modes (Junping et al., 2013; Zhizhao et al., 2013; Martin et al., 2011; Huber et al., 2010; Alkan, 2008; Kouba and Heroux, 2001). With the advent of real-time precise products from the IGS Real-time Pilot Project, the PPP is started using real-time kinematic application (Junping et al., 2013). In this method, users only require a single GPS receiver to obtain his/her position at any location in a global datum. Although the PPP has become more popular, it has still some drawbacks including necessity of long occupation time for the carrier phase ambiguities to converge and unavailability of PPP evaluation mode in commercial GPS processing software. In addition to the PPP-technique being used in a variety of scientific and inhouse software, there are also various internet-based online processing services.

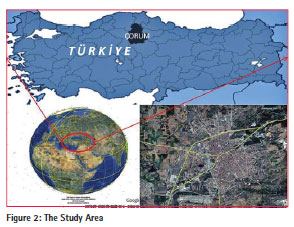
In this study, geodetic points with different characteristics in the province of Çorum, Turkey were employed in a comparative study when coordinates were determined with Network GPS (i.e., TUSAGA-Aktif), and with commonly used online PPP services (i.e., CSRSPPP, magicGNSS/PPP and APPS). The Network GPS-derived and PPP-derived coordinates were compared with those of relative (differential) technique results and an accuracy analysis was conducted.
TUSAGA-Aktif and webbased online PPP services
TUSAGA-Aktif
Continuously Operating Reference Station (CORS) networks have been set up to provide data collection, processing and transmission to users in many countries and regions. In Turkey, CORS network became active in 2009. The CORS-TR Network, later named as TUSAGA-Aktif Network, was established in cooperation with Istanbul Kültür University, the General Directorate of Land Registration, the Cadastre of Turkey and the General Command of Mapping of Turkey and sponsored by the Turkish Scientific and Technical Research Agency (TUBITAK) (Mekik et al., 2011a). The users determine the position fast and economically with a few cm accuracy within minutes, even seconds with TUSAGA-Aktif network. The network can be also used for modelling the atmosphere, predicting weather, monitoring plate tectonics and determining datum transformation parameters (Mekik et al., 2011b). Achievements provided by these networks are as follows (Kahveci 2009):
• The personnel and instrument need for reference station(s) is eliminated,
• Prior to the execution of surveying task, it eliminates the finding of known- coordinate points and thus saves time, personnel and money,
• Three-dimensional precise coordinates can be obtained in real time in the desired datum, including National Reference System,
• Points are continuously monitored and coordinates are updated in the event of any deformation.
As of today, TUSAGA-Aktif system consists of 146 Reference Stations and 2 Control Stations (master and auxiliary) (Figure 1). The software used in this system can calculate corrections in the ionosphere, troposphere, reflection and orbital corrections. The system reference stations collect GPS data at 1s and 30s interval and upload them to the Control Stations via Internet. The continuously collected static data can also be downloaded for post-processing with a limited fee.
The system server collects satellite observations and sends RTK corrections to the rover. Several RTK correction techniques are used: FKP, VRS and MAC. Communication between users and the control center is provided by NTRIP protocol via GSM, GPRS/EDGE using RTCM 3.0 and other protocols (Mekik et al. 2011b). The user of the TUSAGA-Aktif has been increasing day by day and the number has reached to over 3,600 as of April 2011 (Mekik et al., 2011b). More detailed information about Turkish RTK CORS Network, (i.e., TUSAGA-Aktif Network) can be found in Mekik et al., (2011a and 2011b), Yildirim et al., (2011).
Web-based online-PPP services
The PPP technique provides precise positioning using single GNSS receiver considering precise satellite orbit and clock corrections without any reference station (Zumberge et al., 1997). With technological advancements, precise satellite orbit and satellite clock corrections have been served by some institutions such as International GNSS Service (IGS), Center for Orbit Determination in Europe (CODE) and Jet Propolsion Laboratory (JPL) (Kouba and Heroux, 2001). The accuracy of satellite orbit and satellite clock corrections has increased day by day and reaching this data has become easier (Martin et al., 2011). It is now possible to obtain decimetre to centimeter level accuracy in both static and kinematic modes using only a single GPS receiver with PPP (Alkan and Öcalan, 2013; van Bree and Tiberius, 2012; Geng et al., 2010; Choy et al., 2007; Kouba, 2003; Gao and Shen, 2002; Kouba and Héroux, 2001; Zumberge et al., 1997). With the advent of the IGS Real-time Pilot Project, the availability, reliability and precision of real-time products will be improved upon and the Real-time PPP applications would have increased (Junping et al. 2013).
Various GNSS processing software (scientific, in-house, and online) have been used for PPP-derived coordinates and the usage of web-based online processing services have become widely popular in recent years (Alcay et al., 2013; Alkan, 2008). Because of the fact that postprocessing GPS software need expertise and usually requires license fee; users tend to use web-based solutions which are easy to use (Alkan and Öcalan, 2013). In these services, users can upload GPS observation files and select the processing mode with a few clicks through the service’s interactive web page, and they will be processed automatically. After completing the process,the results were sent to the users by e-mail or retrieved from ftp site. Together with the position, a detailed report including input data quality, used configuration, positioning quality, statistics, graphics, tables and some other information were also provided.

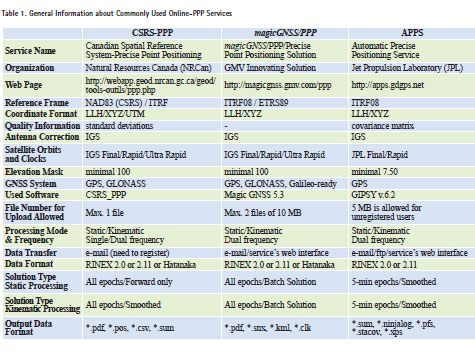
Although there are several web-based online GPS-PPP processing services, the most known and used online services, i.e., CSRS-PPP, magicGNSS/ PPP and APPS were used in this study. Some brief information of these services are given as follows:
Canadian Spatial Reference System – Precise Point Positioning (CSRS-PPP):
CSRS-PPP is an online application for GNSS data post-processing that allows users to compute higher accuracy positions from their raw observation data. The service can accept single or dual frequency RINEX data collected in static or kinematic modes. The coordinates of the point(s) can be estimated based on two different datum – Canadian Spatial Reference System (CSRS) and International Terrestrial Reference Frame (ITRF). It should be pointed out that membership is required to access the service (URL-2).
magicGNSS/PPP :
This web-based service permits GNSS users to determine their position or trajectory with centimeter-level accuracy. Users can submit their collected data in standart RINEX format and the service also supports binary formats recorded by most receivers. Users can either upload raw data files in the webbased workspace or send them via e-mail. It has two processing modes; static and kinematic (URL-3).
Automatic Precise Positioning Service (APPS):
The service operated by NASA’s Jet Propulsion Laboratory and users estimate their position in static, in motion, on the ground or in air. This service is capable of processing the GPS data in both static and kinematic modes. The users may send their measurements in files via e-mail, ftp server and service web page (URL-4).
Main features of the CSRS-PPP, magicGNSS/PPP and APPS services are given in Table 1. More detailed information about the services can be found in their web page that has been provided in the table.
Field trial
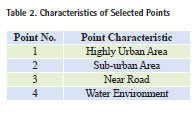
In order to compare Network-RTK and Online-PPP techniques with respect to positional accuracy, two field trials were conducted in Çorum District in March and August 2013 (Figure 2). During the test measurements, 4 points with different land use/cover characteristics were established (Table 2).
As a first step, the selected point’s coordinates were estimated with CORS network by using Network-RTK technique via the GSM connection in ITRF datum. During data collection, fixed solutions were obtained only within a few minutes and CORSderived coordinates were determined in the field in real-time (Figure 3).
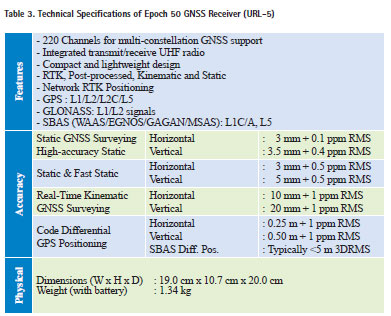
After the CORS measurements, static sessions were started and 2-hour GPS data was collected. All the test measurements were carried out with Spectra Precision (Ashtech) Epoch 50 GNSS dual frequency GPS receivers. Some of the technical specifications of the receiver are given in Table 3.
To obtain known coordinates of the selected points with differential method, one of the CORS station CORU (40° 34’ 13.5” N, 34° 58’ 55.9” E, 922.1 m – in WGS84), were used as a reference station. The data of reference station, CORU, were downloaded from the related internet site. The collected data by dual frequency geodetic-grade receivers, both on occupied points in static sessions and reference station data, were processed by GPS processing software of Leica Geosystems Leica Geo Office (LGO), to obtain known coordinates of those 4-points. The baseline from the reference station is about:
• 2.2 km away from Point 1,
• 4.4 km away from Point 2,
• 34.9 km away from Point 3,
• 46.0 km away from Point 4.
Some processing parameters used in the evaluation stage are given in Table 4.
All collected data with dual frequency geodetic-grade GPS receivers in the static sessions were converted to the RINEX format and then submitted to the web-based online-PPP GPS Processing Services, and through the e-mail for magicGNSS/PPP and APPS. After the submission of the RINEX data to the PPP service, the results were taken from online services.
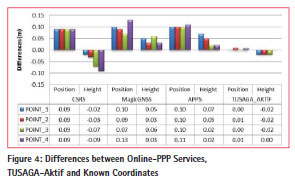
The PPP-derived coordinates from online services and TUSAGA-Aktif Real-time, Network RTK-derived coordinates were compared with those of relative (differential) technique results and differences in position and ellipsoidal height are given in Figure 4.
As it can be seen from Figure 4, each of the three online services gives similar accuracy results both in position and height, and in general, sub-decimeter level of accuracy was obtained with PPP technique. However, exceptionally magicGNSS/PPP service provides 13 cm difference at Point-4 (water environment) for position. In terms of TUSAGA-Aktif, results showed that Network RTK-derived coordinates agreed with the relative positioning solution of a few cm level accuracy in both position and height.
Conclusion
This study aimed to assess the accuracy performance of the Network-RTK technique and web-based online PPP services. The test measurements showed that Network RTK-derived fixed coordinates agreed with the relative positioning solution at a few cm level accuracy in both position and height with a very short occupation time, i.e., couple of minutes. In addition, this study shows that TUSAGA-Aktif system can be used in most surveying applications that require high precision and strong alternative to the conventional differential methods that require expensive and time-cost processes. The results also showed that PPP technique provided decimeter positional accuracy and height as well for 2 hours collected GPS data. Based on the results, it can be concluded that the online-PPP services can fulfill the needs of GNSS users for applications requiring decimeter level of accuracy.
TUSAGA-Aktif system does not require conventional differential GPS measurements and post-processing. It provides instantaneous, real-time positioning within centimeter-level accuracy with fast, economically and effectively, and that is why CORS networks like TUSAGA-Aktif have become more popular almost all over the world. Distance limitation and data communication requirement between the rover and its base station and need of GPS receivers with RTK capability are some of the disadvantage of the technique. In some countries, as in Turkey, usage of CORS network requires membership and fee for measurements.
The PPP provides GNSS users to determine their position within cm to dm level accuracy at any location in a global datum without the need of additional data from any reference station and it is an ideal system for precise positioning over long distances and/or where no full CORS coverage is available. In this method, to obtain high accuracy, long occupation time is needed to converge. The long convergence time in PPP restricts its usability in many cases where rapid GPS surveying is required and surveying efficiency is concerned (Zhizhao et al., 2013). The PPP technique overcomes the distance limitation between reference and rover in RTK technique. The PPP method has become popular with its unique advantages and increasingly used in research and surveying applications. The web-based online PPP services have been applied with the advantages of user-friendly interface, being free-of charge and not requiring license fee or knowledge of GPS processing software or a deep GNSS knowledge (Alkan and Öcalan, 2013).
Acknowledgement
The authors would like thank to the service providers for giving permission to use the online web-based services. This paper is extended and reviewed version of the poster presentation that was presented at the ISGNSS-2013 Symposium, Istanbul, Turkey, 22-25 October 2013.
References
ALÇAY, S., YIGIT, C. Ö. and CEYLAN, A., 2013. Comparison of the CSRS-PPP, MagicGNSS and APPS Web Based Software’s Static PPP Module. Electronic Journal of Map Technologies. 5 (1), pp.1-12 (in Turkish).
ALKAN, R.M. and ÖCALAN, T., 2013. Usability of GPS Precise Point Positioning (PPP) Technique in Marine Applications. Journal of Navigation. 66 (4), pp. 579-588.
ALKAN, R.M., 2008. Precise Point Positioning Performance of Lowcost OEM and Geodetic Receivers Using Online Processing Service, In. Proc. of International Symposium on GPS/GNSS. Odaiba, Tokyo, Japan, November 11-14.
CHOY, S.L., ZHANG, K., SILCOCK, D. and WU, F., 2007. Precise Point Positioning – A Case Study in Australia, In Proc. of Spatial Sciences Institute International Conference-SSC2007, Tasmania, Australia, May 2007, pp. 192–202.
El-RABBANY, A., 2006. Introduction to GPS: The Global Positioning System. (2nd revised edition), Boston: Artech House Publishers.
GAO, Y. and SHEN, X., 2002. A New Method For Carrier-Phase– Based Precise Point Positioning, Navigation, 49 (2), pp. 109–116.
GENG, J., TEFERLE, F.N., MENG, X. and DODSON, A.H., 2010. Kinematic Precise Point Positioning at Remote Marine Platforms, GPS Solutions, 14 (4), pp. 343–350.
HUBER, K., HEUBERGER, F., ABART, C., KARABATIC, A., WEBER, R. and BERGLEZ, P., 2010. PPP: Precise Point Positioning- Constraints and Opportunities. XXIV FIG International Congress, Sydney, Australia, April 11-16.
JUNPING, C., HAOJUN, L., BIN, W., YIZE, Z., JIEXIAN, W. and CONGWEI, H., 2013. Performance of Real-Time Precise Point Positioning. Marine Geodesy. 36, pp. 98-108.
KAHVECI, M., 2009. Real Time Continuously Operating Reference Stations (RTK CORS) Networks and Considerations About Them. HKM Jeodezi, Jeoinformasyon ve Arazi Yönetimi Dergisi. 100, pp. 13-20 (in Turkish).
KOUBA, J. and HÉROUX, P., 2001. Precise Point Positioning Using IGS Orbit and Clock Products, GPS Solutions, 5 (2), pp. 12–28. KOUBA, J., 2003. A Guide to Using International GPS Service (IGS) Products, IGS Central Bureau, February 2003 [WWW] Available from: http://igscb.jpl. nasa.gov/igscb/resource/pubs/ GuidetoUsingIGSProducts. pdf. [Accessed 16/10/2013].
MARTIN, A., ANQUELA, A.B., CAPILLA, R. and BERNE, J.L., 2011. PPP Technique Analysis Based on Time Convergence, Repeatability, IGS Products, Different Software Processing, and GPS+GLONASS Constellation. Journal of Surveying Engineering. 137 (3), pp. 99-108.
MEKIK, C., YILDIRIM O. and BAKICI S., 2011a. An Overview of RTK Network of Turkish Republic (TUSAGA-Aktif). International Global Navigation Satellite Systems Society-IGNSS Symposium 2011. Sydney, Australia, November 15-17.
MEKIK, C., YILDIRIM, O. and BAKICI, S., 2011b. The Turkish Real Time Kinematic GPS Network (TUSAGA-Aktif) Infrastructure. Scientific Research and Essays. 6 (19), pp. 3986-3999.
RIZOS, C., 2008. The Contribution of GNSS CORS Infrastructure to the Mission of Modern Geodesy. 7th Int. Symp. & Exhibition on Geoinformation, Kuala Lumpur, Malaysia, October 13-15.
RIZOS, C., JANSSEN, V., ROBERTS, C. and GRINTER, T., 2012. Precise Point Positioning: is the Era of Differential GNSS Positioning Drawing to an End? FIG Working Week 2012. Roma, Italy, May 6-10.
WESTON, N. D. and SCHWEIGER, V., 2010. Cost Effective GNSS Positioning Techniques. FIG Publication No 49, FIG Commission 5 Publication. The International Federation of Surveyors, Copenhagen, Denmark
ZHIZHAO, L., SHENGYUE, J., WU, C., and XIAOLI, D., 2013. New Fast Precise Kinematic Surveying Method Using a Single Dual-Frequency GPS Receiver. Journal of Surveying Engineering. 139 (1), pp. 19-33.
ZUMBERGE J.F., HEFLIN M.B., JEFFERSON D.C., WATKINS M.M. and WEBB F.H., 1997. Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks, Journal of Geophysical Research. 102(B3), pp. 5005-5017.
van BREE, R.J.P. and TIBERIUS, C.C.J.M., 2012. Real-Time Single- Frequency Precise Point Positioning: Accuracy Assessment, GPS Solutions, 16 (2), pp. 259–266.
YILDIRIM, O., SALGIN, O. and BAKICI, S., 2011. The Turkish CORS Network (TUSAGA-Aktif). FIG Working Week 2011, Marrakech, Morocco, May 18-22.
URL 1: TKGM (2013) TUSAGA-Aktif Reference Points [WWW] Available from: http://www.tkgm.gov.tr/tr/ noktakonumlari [Accessed 16/10/2013].
URL 2: Natural Resources Canada (2013) Precise Point Positioning [WWW]. Available from: http://webapp. geod.nrcan.gc.ca/geod/tools-outils/ ppp.php [Accessed 30/10/2013].
URL 3: magicGNSS/PPP (2013) [WWW]. Available from: http://magicgnss.gmv. com/ppp [Accessed 30/10/2013].
URL 4: NASA Jet Propulsion Laboratory (2013) The Automatic Precise Positioning Service of the Global Differential GPS (GDGPS) System [WWW]. Available from: http://apps. gdgps.net [Accessed 30/10/2013].
URL 5: Spectra Precision (2013) EPOCH 50 Technical Specifications [WWW] Available from: http:// legacy.spectraprecision.com/ epoch-50-specsheet.aspx [Accessed 16/10/2013].











 (5 votes, average: 4.20 out of 5)
(5 votes, average: 4.20 out of 5)




Leave your response!