| Positioning | |
Precise GNSS positioning for mass-market applications
This paper describes some latest work trying to address the abovementioned challenges, including cost and complexity of current correction services, precise positioning with low-cost GNSS sensors, and quick availability of precise positioning solutions in challenging environments. Numerical results are provided to demonstrate their potential to support mass-market applications |
 |
|
Mass-market applications, ranging from self-driving cars, unmanned aerial vehicles (UAV) to handheld smartphones, are increasingly demanding high-precision from GNSS integrated with other enabling navigation sensors. This expectation is driven by the increasing availability of carrier phase measurements from very low-cost GNSS sensors of small form factor (chipsets or modules) that have been widely used by massmarket applications. Google has made raw GNSS measurements including carrier phase available from a phone or tablet computer. Broadcom has recently announced to launch a mass-market GPS chip that uses L1 and L5 signals to pinpoint a device’s accuracy to within 30 centimeters. Although the carrier phase measurements, particularly in challenging environments, are still subject to further improvement and verification by user applications, their potential to support precise positioning is just a matter of time before their wide adoption.
Precise positioning with low-cost GNSS sensors faces some significant challenges. Different from the conventional highprecision GNSS applications, only lowcost GNSS sensors are available for mass-market applications, while the existing high-precision GNSS techniques, either based on real-time kinematic (RTK) or precise point positioning (PPP) techniques, are mainly based on highend GNSS receivers and targeted only for professional applications such as geodetic surveys, airborne mapping, atmosphere remote sensing, precision agriculture, and marine positioning (Bisnath and Gao, 2009). Frequency carrier phase cycle slips and large measurement noise in low-cost GNSS receivers present a challenge in order to use them to achieve high-precision positioning solutions.
Current precise GNSS positioning systems also depend on high update rate real-time corrections for error mitigation, typically 1-2 minutes for orbit corrections and 1-10 seconds for clock corrections. A dependence on real-time corrections at a high update rate for error mitigation will make the positioning system sensitive to correction outages. For example, a high update rate means the users have to maintain continuous wireless connections in order to timely receive the correction data, making the positioning performance sensitive to the latency of the orbit and clock corrections and susceptible to connectivity restrictions. In real-time applications, the correction data from communication satellites could be blocked or attenuated by buildings or trees in urban canopy and loss of correction data could also occur due to poor wireless network connections, causing frequent message packet losses. The loss of correction data in turn will reduce the availability of the positioning system due to performance degradation and re-convergence of the positioning solutions. Increased communication cost and higher power consumption in the devices for users to receive the correction data at a high update rate is also problematic for mass-market applications, which demands careful consideration of the bandwidth, latency and data transfer cost for correction data transmission in the development of a realtime precis positioning system (Mozo et al, 2012). Mass-market application also requires quickly obtainable precise position solutions and therefore long ambiguity convergence and fixing time will not be acceptable. UAV, for example, depends on precise position all the times in order to achieve high performance flight control in complex environments, e.g. navigating a UAV in confined environments.
This paper will describe some recent work with an effort to address the abovementioned challenges, including cost and complexity reduction of correction services, precise positioning with low-cost GNSS sensors, and instant availability of precise positioning solutions in challenging environments. Numerical results from field tests are provided to demonstrate their potential to support mass-market applications.
Precise positioning with low-cost GNSS sesnors
GNSS provides two major types of positioning measurements, namely pseudorange and carrier phase measurements. High-precision positioning techniques with GNSS require the use of the carrier phase measurements in order to improve the positioning accuracy from several meters to centimeterlevel with integer ambiguity resolution. Carrier phase measurements however are currently not available in most low-cost GNSS receivers or not usable in harsh environments due to the use of poor quality oscillator and the lack of proper carrier phase tracking algorithms. For example, low-cost temperature compensated crystal oscillator (TCXO) will limit the integration time and induce more phase lock loop phase noise. Subjected to severe low- and medium-frequency vibration environments as the case of flying with a UAV, the oscillator vibration-induced noise must be handled properly otherwise cycle slips will be induced. Making carrier phase measurements from low-cost receivers and using them to obtain more accurate positioning accuracy therefore is a necessary step in order to extend precise positioning techniques to mass market applications (Pesyna et al. 2014; Bhaskar 2015). Although Google has made raw GNSS measurements including carrier phase available from a phone or tablet computer, the quality of carrier phase measurements are still subject to further improvement and verification and are not yet be able to support precise positioning particularly in challenging environments.
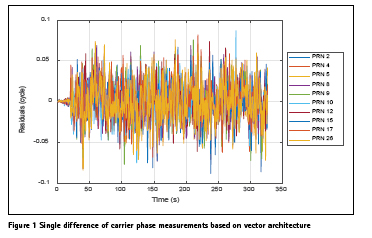
Carrier phase measurements are generated from the phase lock loops (PLLs) of a GNSS receiver. Usually the GNSS receiver utilizes individual PLL to track carrier phase for each satellite, known as scalar carrier tracking techniques. But there is a dilemma problem to the design of the loop parameters in a conventional tracking loop. To mitigate the oscillator phase noise, for example, the loop filter bandwidth of the conventional scalar phase lock loop should be increased but an increased bandwidth will reduce the ability of the tracking loop to reject the thermal noise. Considering that the receiver oscillator and dynamic stress are common for different channels, the bandwidth of the channel loop can be reduced if the abovementioned common error can be estimated before the correlator for individual channels. This has led to the development and implementation of carrier phase tracking techniques based on vector architecture (Chen et al., 2017). Shown in Figure 1 are the single differences of carrier phase measurements based on vector architecture. The results indicate that no cycle slips are present for all satellites. If based on scalar architecture, cycle slips would present in carrier phase measurements to multiple satellites.
Scalable update rate correction transmission
Current real-time satellite orbit and clock correction data generated at the server system are in essence the differences of precise orbit/clock with respect to the broadcast orbit/clock. As a result, the corrections must be transmitted to users at a high update rate (typically 1-2 minutes for orbit corrections and 1-10 seconds for clock corrections) in order to ensure sufficient accuracy. In the past, real-time precise orbit and clock corrections were available from only a few commercial suppliers, via communication satellites with dedicated hardware as well as significant subscription fees. This was once a limiting factor for developing realtime PPP applications (Gao and Chen, 2005). For mass-market applications, new correction services should be developed to address challenges related to bandwidth, latency and data transfer cost, although the development of the Networked Transport of RTCM via Internet Protocol (NTRIP) has made the correction data transmission easier and less expensive to access than the satellite-based correction transmission.
A new correction update based precise point positioning system was proposed in Gao et al (2015, 2017). Different from current real-time PPP systems, the server system generates real-time precise satellite orbit and clock initial parameters (IPs). Instead of corrections representing the differences of precise orbit/clock with respect to the broadcast orbit/clock, the initial parameters consist of initial conditions and additional crucial data for orbit and key coefficients for clock. Provided at selected reference time, the IPs can be applied by the users to derive corrections at any desired epochs before next update from the server system, for orbit through numerical integration and clock through extrapolation. This approach would allow scalable correction update rates for different applications, including lower update rates for the purpose of reducing system sensitivity to correction outages and communication cost, as required for mas-market applications. With reduced update rate on initial parameters, the requirements on continuous wireless connection can also be relaxed, making the positioning system less susceptible to temporary poor network connection and communication satellite signal blockage, particularly in challenging environments such as when a receiver is operating in urban canyons and under tree canopy.
Figure 2 shows the accuracy statistics of the orbit corrections generated by the users over a period of 12 h using orbit initial parameters. Daily solutions over a week are used to calculate the average RMS values, with respect to the IGS Final products. As the figure shows, the average orbit RMS values in all three directions are smaller than 6 cm for all GPS satellites, with average RMS values of the 31 satellites about 3 cm for the radial, along-track and cross-track directions. The results demonstrate that the initial parameters for orbit correction generation can be valid for a long period of time, allowing the adoption of much lower update rates than currently applied high update rates in applications.
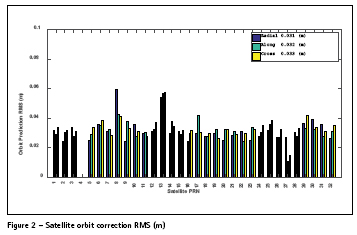
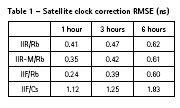
Table 1 shows the accuracy statistics of the clock corrections generated by the users over a period of 1, 2 and 3 hours using the clock initial parameters. The results indicate that the performance of user generated corrections depends on the type of clocks. For correction generation over 1 hour, the RMS values of IIR/Rb, IIR-M/Rb, IIF/Rb and IIF/Cs clocks are 0.41 ns, 0.35 ns, 0.24 ns and 1.12 ns. For correction genertaion over 6 hours, the RMS values of IIR/Rb, IIR-M/Rb and IIF/Rb clocks are smaller than 0.62 ns while the RMS value for the IIF/Cs clock is 1.83 ns. Compared to other types of clocks, IIF/Cs clock is much instable.
Quick availability of precise positioning solutions
Mass-market applications demand quick and even instant obtainability of precise position solutions without initial or reconvergence. Further they also demand stand-alone operation without requiring base stations. Although PPP techniques able to eliminate the requirement on base stations, the required time for carrier phase ambiguities to converge or to be fixed to integer values are significantly long, typically at a level of several tens of minutes. This is not acceptable for most mass-market applications.
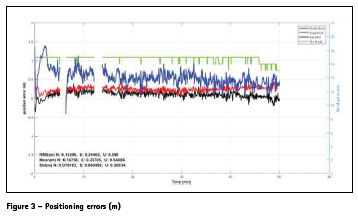
Two approaches can be focused in an effort to make precise positioning solutions quickly available in real-time applications. One is to focus on the reduction of the convergence time for the ambiguity float solutions. With the deployment of multiple GNSS systems, the combination of measurements from all available constellations, e.g. from fully operational GPS and GLONASS and partially operational Galileo and BeiDou, can help reduce the convergence time as a result of geometry improvement (Cai et al, 2015). Multi-GNSS approach alone, however, will not be able to totally eliminate the required convergence time. Uncombined positioning model is increasingly adopted which allows for the integration of additional information such as precise ionospheric products. The elimination of ionospheric effects has the potential to enable precise positioning solutions quickly available in real-time applications, but the improvement will depend on the quality of the ionospheric products. The obtainable positioning accuracy also depends on the efficiency of mitigating errors and systematic effects in the measurement models. With the moderization of GNSS systems including multi-frequency signals, triple-frequency based ambiguity resoltuion technqiyues have been investigated which, together with other advanced processing algorithms, has made fast PPP ambiguity resolution feasible (Wang, 2014). Considering single-frequency GNSS receivers are still dominated in the massmarket applciations, Figure 3 shows the positioning errors from a kinematic test, with the use of a low-cost single-freqeuncy GNSS receiver and real-time orbit, clock and ionospheric corrections. The results indicate that precise positioning solutions can be quickly obtainable (virtually no convergence period for the horizonatl solutions), which demonstartes its potential to support mass-market applciations. The two data gaps in the figure were caused by data outages due to loose cable conneciton resulting in power losses.
Conclusions
This paper has identified and discussed several challenges in an effort to extend precise positioning techniques to support mass-market applications based on low-cost GNSS. It has described feasible solutions to address the challenges as well as numerical results to demonstrate reduced cycle slips in carrier phase measurements using new phase tracking techniques, reduced sensitivity to correction outages and reduced system cost and complexity by using scalable update rates of realtime corrections and quickly available precise positioning solutions through advanced positioning algorithms.
Since mass-market applications are often conducted in challenging environments, techniques to bridge the GNSS signal blockages are demanded in order to further improve the positioning system availability and robustness. Integration of GNSS with other low-cost sensors, such as low-cost inertial and vision sensors that are widely embedded in UAV, self-driving cars and smartphones, should also be investigated in order to develop low-cost and high availability and robustness positioning systems towards mass-market applications.
Acknowledgements
The contributions to the preparation of this paper from the graduate students in the Positioning and Mobile Information System group at The University of Calgary are acknowledged.
References
Bhaskar S (2015). “Improved GNSS Carrier Phase Tracking for Hand Held Receivers”. PhD. Thesis, Department of Geomatics Engineering, The University of Calgary, Calgary, Canada.
Bisnath, S and Gao, Y (2009). “Precise Point Positioning: a powerful technique with a promising future”, Innovation, GPS World, April 2009.
Cai, C, Gao, Y, Pan, L, Zhu, J (2015). “Precise point positioning with quadconstellations: GPS, BeiDou, GLONASS and Galileo”, Advanced Space Research, April, 2015, http://dx.doi.org/10.1016/j. asr.2015.04.001. Volume 56, Issue 1, 1 July 2015, Pages 133–143.
Chen S, Gao Y, Lin T (2017). “Effect and Mitigation of Oscillator Vibrationinduced Phase Noise on Carrier Phase Tracking”. GPS Solution. doi:10.1007/s10291-017-0629-2
Gao, Y and Chen, K (2005). “Performance analysis of precise point positioning using real-time orbit and clock products”, Journal of Global Positioning Systems, Vol. 3, No. 1-2. pp.95-100.
Gao, Y, Zhang, W and Li, Y (2015). “Methods and systems for performing global navigation satellite system (GNSS) orbit and clock augmentation and position determination”, Patent pending.
Gao Y, Zhang W, Li Y (2017). “A New Method for Real-Time PPP Correction Updates”. International Association of Geodesy (IAG) Symposia.
Mozo, A, Calle, D, Navarro, P, Píriz, R, Rodríguez, D and Tobías, G (2012). “Demonstrating in-the-field real-time precise positioning”, Proceedings of the ION GNSS+, 16-20 September, 2013, Nashville, TN, pp. 1642-1651.
Pesyna J, HeathJ, Humphreys T (2014). “Centimeter Positioning with a Smartphone-Quality GNSS Antenna”. Proceedings of ION GNSS+ 2014, Institute of Navigation, Tampa, FL, September 8-12, 1568-1577.
Wang, M (2014). “Ambiguity Resolution with Precise Point Positioning”, PhD Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, Canada.
The paper was presented at FIG Congress 2018 Istanbul, Turkey, May 6–11, 2018.










 (No Ratings Yet)
(No Ratings Yet)





Leave your response!