| GNSS | |
Improving availability of the EGNOS system in Algeria for dual frequency
The objective of this present work is to analyze the coverage of the EGNOS system for the civil aviation applications in Algeria. The main searched results concern the comparison between the availability of the system when using the single frequency (L1) in simple mode, and the double frequency (L1/L5) |
 |
|
 |
|
 |
|
The European system EGNOS (European Geostationary Navigation Overlay Service) provide ranging signals transmitted by GEO satellites, differential corrections on the wide area and additional parameters aimed to guarantee the integrity of the GNSS user. EGNOS offers the following information:
▪ Satellite orbit and clock corrections to the existing satellite navigation services (GNSS and GEO), as well as the estimation of errors associated to satellites or User Differential Ranging Error (UDRE).
▪ Ionospheric corrections for a given grid of points, as well as the estimation of errors associated to ionosphere or Grid Ionospheric Vertical Error (GIVE).
▪ Satellite orbit/clock corrections and ionospheric corrections are dynamically modeled. EGNOS shall communicate the user the corrections that are available to be used by the receiver. The information of the models is packed on messages to be sent to the user.
▪ Tropospheric corrections are statically modeled, which means that corrections are tabulated and the information does not depend on any external behavior but the user position (a mean troposphere is assumed).
Aviation navigation requirements
Several Satellite Based Augmentation Systems are currently in use by the aviation community. The Federal Aviation Administration’s objective in using GPS is to provide enhanced services and reduce infrastructure cost for aircraft navigation. To do so, the Required Navigation Performance (RNP) for accuracy, integrity, availability, and continuity must be met. These four parameters are defined as follows:
▪ Accuracy corresponds to the difference between the measured and the real position, speed or time value.
▪ Integrity refers to the confidence the user is able to have in the calculation of the position. Integrity includes a system’s capacity to provide confidence thresholds as well as alarms in the event that anomalies occur.
▪ Continuity defines a system’s ability to function without interruption throughout the operation the user wants to carry out (for example landing a plane). Continuity is the probability, from the moment that the accuracy and integrity criteria are fulfilled at the beginning of an operation that they continue to be fulfilled throughout that operation’s entire duration.
▪ Availability is the percentage of time in which, over a certain zone geographical area, the accuracy integrity and continuity criteria are fulfilled. [1]
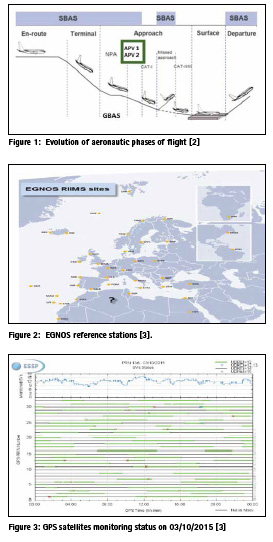
The requirements for the civil aviation have been standardised by the International Civil Aviation Organisation (ICAO) and they assume different values for each specific phase of flight. ICAO for SBAS for en-route through category I precision approach operations are shown in figure 1.
EGNOS extension in the MEDA region
At present, in the mission of EGNOS, the provision of services for MEDA (MEDiterranean Area) is foreseen. This extension will improve simultaneously the performances over the core EGNOS and MEDA service areas, creating new markets in emerging countries.
The main function of the Ranging and Integrity Monitoring Station (RIMS) is to collect measurements from GPS satellites and to transmit these raw data every second to the Central Processing Facilities (CPF) of each Mission Control Centre (MCC).
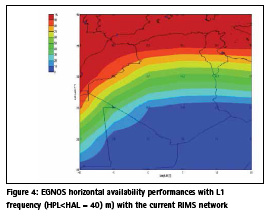
The current RIMS network comprises 39 RIMS sites located over a wide geographical area. Figure 2 shows the geographical distribution of the RIMS already in operation and where no RIMS station is installed in Algeria.
Use of single-frequency

Use of dual frequency
The usage of dual civilian frequencies (L1 and L5) is an attempt to address the largest delay estimation in the EGNOS system (ionospheric delay), the need for better improvement of its error estimation and correction was raised. This need lead to the potential use of both L1 and L5 frequencies together which would improve the performance for GPS users by allowing them to estimate and correct/mitigate the ionospheric errors.
This is done in a way through which the GPS dual frequency receiver would be directly involved in estimating the ionospheric delay and applying its error factor to the pseudo-range measurements for each line of sight GPS satellite without any help needed from the EGNOS system. There is another major advantage from using the dual frequency system which is its relative immunity against unintentional interference. So if one of the signal frequencies has been jammed, we will still have visual and measurements from the second signal from the same satellite. [7]
For an L1/L5 dual-frequency GPS/EGNOS user , the weighting matrix W is a diagonal matrix and the inverse of the ith diagonal element is given by the variance for the corresponding satellite, as calculated in equation:

Availability analysis
The criterion of this research is to compare the coverage of availabilities in Algeria versus the horizontal and vertical alert limit (HAL and VAL) under the different cases. The simulation tool used is the SBAS Simulator 2 including dual- frequency developed by European Space Agency (ESA). The following parameters were used to evaluate EGNOS system performance in flight operations:
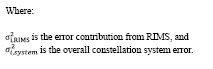
▪ Date 03/10/2015; EGNOS satellite monitoring status for each satellites GPS as function of the precision indicators (UDREI) is given in figure 3.
The monitoring status of each satellite in function of UDREI, it’s given by:
▫ UDREI<12: SV satellite is used by EGNOS.
▫ UDREI=12, 13: Although not considered as unhealthy, satellites with UDREI ≥12 cannot be used for all services.
▫ UDREI=14: SV unmonitored.
▫ UDREI=15: SV unhealthy.
▫ The satellites that are not in EGNOS GPS mask are also represented in the figure 3.
▪ The area covered is [-10, 15] degree in longitude and [15, 40] degree in latitude (to allow coverage for all the Algerian country);
▪ RIMS Network: RIMS stations used in the simulation is based on operational stations in 2015 which are in total of 39, presented in figure 2;
▪ σUDRE and σDFRE is determined by the interpolation; is set the value which is based on number of RIMS that monitor a specific satellite. The model used to calculate the ionospheric error (GIVE) is based on an interpolation which depends on current RIMS stations;
▪ Availability simulation computes the availability for a defined service level, it calculated in relation to the percentage of time when the protection levels (HPL and VPL) are below their threshold values (set for a type of operation by the alarm limits, i.e. HAL and VAL).. In this simulation we consider three services: APV1 (HAL = 40 m, VAL = 50 m), LPV 200 (HAL = 40 m, VAL=35 m), and APV2 (HAL= 40 m and VAL=20 m).
EGNOS horizontal availability
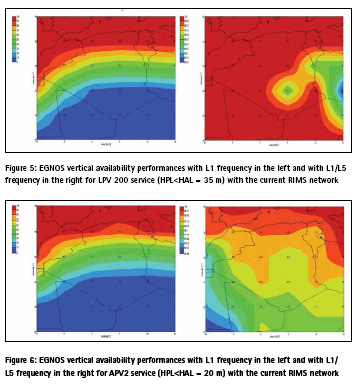
The simulation result of horizontal availability for an L1 single-frequency is shown in Figure 4. As can be seen, in north of Algeria (φ ˃35°); EGNOS is available of more than 90 %; this coverage is ensured by the European stations and neighbouring countries. However, in dual frequency mode, the simulation results show that the availability is higher than the 99% of 40 m HAL (necessary for all horizontal service) in Algeria.
Table 1 summarized EGNOS horizontal availability with single and dual frequency for all services.
EGNOS vertical availability
Now that we have appropriate estimates for the individual error components, we can construct the dual frequency case. Here we use for the availability the calculation of VPL give by equation 4; the results are shown in table 2.
For single-frequency simulation results, the coverage of APV1, LPV 200 and APV2 in centre of Algeria (φ <30°) is less than 60 %, this coverage can be improved if a RIMS station will added in the centre of Algeria for APV1 and LPV 200 [8]; the results show that availability is more than 96 % in north of Algeria (φ ˃35°).
In Algeria, the coverage is slightly better with 39 stations using L1/L5 because the ionospheric delay can be directly estimated; this direct use of dual frequency will be more accurate and offer higher availability. The availability of LPV 200 service is given by figure 5.
The results show that both APV1 and LPV 200 availability is nearly 100% for dual frequency; and even APV 2 availability goes beyond 97% consequently, with dual frequency. It is not obvious that the EGNOS System with GPS alone would meet more than 97 % APV 2 availability in Algeria (VAL =20 meters), as a result to complete 99 % APV 2 availability additional RIMS is required [8]. Figure 6 shows the availability obtained with the current RIMS network for this service.
Comparing figure 5 and figure 6, it is evident that in the case of a single frequency, EGNOS covered the north of Algeria, this coverage is ensured by the European stations and neighbouring countries. However this availability decreases moving in the south.

Conclusion
This study evaluates the performance of dual-frequency GPS in term of EGNOS availability, which is used to determine the service coverage and includes the following cases:
▪ Case 1: APV1 (HAL=40 m, VAL=50 m);
▪ Case 2: LPV 200 (HAL=40 m, VAL=35 m);
▪ Case 3: APV 2 (HAL=40 m and VAL=20 m).
The new signals on L5 enhance the availability of the augmented GPS system for aviation. The nominal performance with two signals increases availability to 100% for the APV1 and LPV200 approach in Algeria. The difference between the availability obtained with EGNOS dual frequency and single frequency is decreased for services associated with a smaller VAL. The implementation of RIMS station in Algeria allow to receive the corrections transmitted by the EGNOS system and will benefit from the advantages offered by this system in particular in the centre and south of the country, in terms of accuracy, availability, integrity and reliability.
References
[1] User Guide for EGNOS Application Developers (2011), ED 2.0, 15/12/2011, CNES, ESA.
[2] M.Ciollaro (2008): GNSS multi system integrity for precision approaches in civil aviation, doctoral thesis, University of Naples “Federico II”- Italy.
[3] ESSP (2017) : https://egnosuser- support.essp-sas.eu/ new_egnos_ops/gps_egnos
[4] T.Walter, J.Blanch, and Puente(2010): Coverage Improvement for Dual Frequency SBAS. Proceedings of the International Technical Meeting of The Institute of Navigation, San Diego, CA, pp. 344-353.
[5] S. Shiun jan (2003): Aircraft landing using a modernized Global positioning system and the Wide area augmentation system, Doctoral thesis, Stanford university.
[6] User Manual (2015) , Upgrade of SBAS Simulator (2015): Iguassu Software Systems. Ref: SBAS-SIM-MANUAL. Issue: 1 Rev.: 2 Date: 19/08/2015.
[7] D. Zayan. And M. Rehan . (2011): Parametric Study on Wide Area Augmentation System for GPS Accuracy Enhancement. International Journal of Computer Applications (0975 – 8887). Volume 28– No.9.
[8] S. Kahlouche., L.Tabti (2017): EGNOS performance using L1/L5 dual frequency on the Algerian area, European Geosciences Union – EGU Vienna | Austria | 23–28 April 2017
[9] S.Shiun Jan. (2010): Vertical Guidance Performance Analysis of the L1-L5 Dual-Frequency GPS/ WAAS User Avionics Sensor. Sensors ISSN 1424-8220, www. mdpi.com/journal/sensors
[10] C.D.Salós Andrés. (2012): Integrity monitoring applied to the reception of GNSS signals in urban environments, Theses of Doctor, Institut National Polytechnique de Toulouse (INP Toulouse).










 (No Ratings Yet)
(No Ratings Yet)





Leave your response!