| GNSS | |
Impact of cheap commercial jammer on BeiDou signal
A detailed analysis is performed using real-world data collected with an RF front-end unit in Northern Europe |
 |
|
 |
|
 |
|
 |
|
 |
|
At the present the society is dependent on accurate and reliable Position, Velocity and Time (PVT) information acquired using Global Navigation Satellite Systems (GNSS). GNSS signals travel a long way from the satellite transmitter to the user receiver antenna on the Earth and therefore the signal power level is extremely low at the user receiver. The low signal level makes the GNSS technology highly vulnerable to intentional interference, called jamming. Jamming is anticipated to proliferate simultaneously with the increase of number and relevance of the applications relying on GNSS. Although jammers are illegal in most of the countries, many people still use them for the protection of personal privacy, i.e. preventing the operation of GNSS receivers that could track their location (Pullen and Gao, 2012). Jammers transmit signals with power and characteristics disturbing acquisition and tracking of GNSS signals (Mitch et al. 2011). The use of easy-access low-cost jammers results in degraded positioning accuracy or total loss of GNSS signals and, therefore, may cause serious damage if the jamming signals are not properly detected and their effects mitigated (Kuusniemi et al. 2012).
Interference is normally classified into narrowband (NB) or wideband (WB) (Kaplan and Hegarty, 2006). Narrowband interference occupies usually less than the entire available spectrum of GPS C/A-code having a bandwidth of 2.046 MHz (Jiang 2004). Sources for narrowband interference are jamming devices but also other RF sources, such as Amplitude Modulation (AM) or Frequency Modulation (FM) transmitters. Unfortunately, the cheap jammers transmit mainly wideband interference signals occupying the entire C/A-code spectrum. In addition to the appearance of large position errors or positioning loss, the presence of such interference may also be evaluated by monitoring e.g. the Carrier-to-Noise density ratio (C/N0) quantifying the signal quality. The typical nominal C/ N0 value for GPS signal is 44 dB-Hz and with such signals the obtained position solution is sufficiently accurate for most use cases, i.e. 5-10 meters, when single-frequency single-receiver performance is considered. In this paper the effect of jamming is evaluated in terms of position solution accuracy and the estimated C/N0 values.
The United States Global Positioning System (GPS) has been in use already for over two decades and is still the most used satellite navigation system. In 2011 the Russian GLONASS navigation satellite system achieved the full operation capability. At the present moment the European Galileo has four satellites in operation and the Chinese BeiDou fourteen; both systems are anticipated to have the full operation capability latest in the year 2020. The wider range of new signals will improve the availability and accuracy of the PVT solution computed using GNSS. Besides, the modernized signals have improved signal characteristics providing better performance, also at lower carrierto- noise density ratios, either due to attenuation in urban environments or jamming. The modern GNSS signals have longer codes, pilot signals that do not encompass data modulation and higher transmission powers. However, despite the careful re-design of the navigation satellite signals e.g. Galileo signals were found to be affected similarly to GPS by wideband jamming (Borio et al. 2013). This is due to the wideband jamming having similar spectral separation with respect to GPS (L1) and Galileo (E1) modulations. However, BeiDou signals have specific features (Bhuiyan et al., 2014) making the system more tolerant of jamming, especially because the center frequency of the civilian B1 signal is 14 MHz off from the GPS/Galileo L1/ E1 center frequency, as jamming is still most of the time directed towards the most used system GPS. The use of more than one GNSS interoperable system provides a multi-GNSS position solution being much more robust than any system alone, also when interference is encountered. However, when multi- GNSS integrating more than three systems is used, the enhancement of position solution accuracy and availability might be compromised with the increase of the Radio Frequency (RF) noise floor hindering the GNSS receiver signal processing (Gibbons, 2011) unless carefully designed. Herein the effects of a cheap commercial jammer on the BeiDou signal will be assessed. In (Baek et al. 2012), jamming of BeiDou signals was simulated and its effects on the signal were evaluated based on the signal quality factor, tolerable jamming power level and propagation range. As far as the authors know, this paper, on the other hand, presents the first BeiDou interference study performed in Europe. The study presented in this paper was committed using real-world signals for evaluating the effect of jamming on the signal quality and the position solution accuracy. First, the specific features of the BeiDou system and signals will be discussed. Then, the software defined multi-GNSS receiver used for experimenting and demonstrating the effects of jamming, FGI-GSRx, will be introduced. Then, experimental results of BeiDou positioning in the presence of intentional interference are presented and compared to the respective results obtained using GPS and multi-GNSS. Finally, concluding remarks and future work are discussed in Section 5.

Chinese navigation satellite system beidou
At present the Chinese navigation satellite system BeiDou consists of 14 satellites and has an operational capability in Asia region. The system is anticipated to be complete in 2020 with 35 satellites. BeiDou will have a mixed space constellation, which means that in addition to the prevailing constellation of 27 Medium Earth Orbit (MEO) satellites, the system will contain five Geostationary Earth Orbit (GEO) and three Inclined Geosynchronous Satellite Orbit (IGSO) satellites. As conveyed by the name, the GEO satellites are located in orbit at an altitude of 35786 kilometers and therefore seem to stay stationary with respect to the Earth. The orbits of IGSO satellites have the same altitude as GEOs and an inclination of 55 degrees to the equatorial plane improving the availability of high elevation satellites in densely populated areas (Montenbruck et al., 2013). The mixed constellation will bring better satellite to user geometry and therefore improve the accuracy of height estimation. However, in Northern areas, as in Finland, GEO satellites are at low elevations which could degrade the BeiDou position solution remarkably. Fortunately, previous research carried out at the Finnish Geodetic Institute has shown that despite the challenges introduced by the Northern location, the position accuracy obtained using BeiDou system is comparable to GPS already in this early stage in favorable conditions (Bhuiyan et al., 2014).

BeiDou signal characteristics are similar to GPS; their spreading code periods are both 1 milliseconds (ms) long and their coordinate systems and the navigation message structure have only minor differences (China Satellite Navigation Office, 2012), (IS-GPS- 200G, 2012). BeiDou B1 signal has twice the chipping rate and the code length than those of the GPS L1 signal. The center frequency of BeiDou B1 signal is 1561.098 MHz, when for GPS and Galileo the nominal center frequency is 1575.42 MHz, although there is a plan to shift the center frequency at 1575.42 MHz in the future (Gibbons 2013). However, the BeiDou signal has one improvement also affecting its narrowband jamming resistance, namely the signal has an additional layer of modulation between the PRN code chips and navigation data; Neumann- Hoffman (NH) code modulation. The use of the NH code modulation improves the data bit rate and it has already been adapted to other modernized GNSS signals, such as GPS L5. Due to the NH code modulation the BeiDou signals have more tolerance to narrowband jamming when its power is tolerable.
FGI-GSRX software defined gnss receiver
Software defined GNSS receivers are beneficial platforms for GNSS research and algorithm design. In software receivers all signal processing and navigation functions are delivered by software, making it possible to modify and develop new algorithms as well as elicit information about the signal properties at all processing stages. While using a software defined receiver, GNSS signals are captured using a radio front-end, which digitizes the analog signals down converted into the intermediate frequency (IF). From then on, all processing is performed by software (Kaplan and Hegarty, 2006).
FGI-GSRx is a Matlab based software defined GNSS receiver built by the Finnish Geodetic Institute on an opensource platform (Borre et al. 2007). At present, the receiver is capable of computing a navigation solution using GPS (L1), BeiDou (B1) and Galileo (E1) independently, as well as providing a multi-GNSS solution using all three systems. The implementation of Glonasscompatibility is ongoing. In recent years, also algorithms for interference detection (Kuusniemi et al. 2013) and mitigation, using deeply coupled INS/ GNSS integration (Ruotsalainen et al. 2013), have been developed and implemented into FGI-GSRx.
Signals processed in FGI-GSRx are collected using a dual-board GNSS front-end stereo v2 from Nottingham Scientific Limited (NSL) capable of capturing simultaneously GPS (L1), Galileo (E1) and BeiDou (B1) signals (Nottingham Scientific Limited 2013). Stereo comprises two front-ends, the other one was used for capturing the B1 signal using a bandwidth of 4.2 MHz and the other one for GPS signal using a bandwidth of 6.61 MHz. Galileo signals may also be captured simultaneously with GPS using the same front-end.
Experimental results
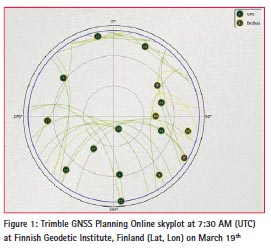
The data used in the experiments was collected in Finland on March 19th 2014. Figure 1 shows a Trimble GNSS Planning Online skyplot for the satellites visible at the time of the data collection with elevation cut-off angle 5 degrees. The skyplot shows that even in Northern Europe six BeiDou satellites (in yellow) out of the fourteen operational may be seen simultaneously. Occasionally, at favorable times even seven or eight satellites can be visible to southern Finland.
GNSS signals were collected using a roof antenna and the stereo-v2 radio front-end introduced above. At first no intentional interference was present. After collecting the data for about 48 seconds GNSS signals were exposed to interference by using a cheap commercial single frequency jamming device, presented in (Kuusniemi et al., 2012), transmitting wideband signals at the L1/E1 frequency. The bandwidth of the jammer is about 16.3 MHz and the maximum output power 13 dBm. However, as the use of a jammer is illegal also in Finland, the experiments were conducted inside the navigation laboratory of the Finnish Geodetic Institute with a special permission from the Finnish authorities using an attenuated output power of -30 dBm.
Below, the effect of jamming is examined based on the C/N0 values and the position solution accuracy, first for GPS, then for BeiDou and finally for a multi-GNSS solution using GPS and BeiDou signals.
Jamming GPS
First, the collected data was processed using the FGI-GSRx for acquiring, tracking and computing the navigation solution from GPS signals. At the time of the data collection, nine GPS satellites were visible offering a good user-tosatellite geometry expressed by a low position dilution of precision (PDOP) value, namely 1.86. Figure 2 shows the C/N0 values for the signals. For the first 48 seconds, when no jamming was present, the C/N0 signals were in adequate level; mainly between 35 and 50 dBHz. At the time when the jammer was turned on, at the 48th second, the values dropped drastically; below 20 dB-Hz for all satellites. Such low C/N0 values indicate that the positioning solution will be inaccurate, and there are chances that the receiver may eventually lose lock after some time.
Figure 3 shows the position error obtained using GPS signal measurements. Before jamming was started, the position errors stayed in the nominal level, namely below 10 meters for horizontal components East (E) and North (N) and below 12 meters for the vertical component (U). The Root Mean Square (RMS) error was 6.2 meters for the horizontal position and 10.5 meters for the vertical. After the jamming device was turned on at the48th second, the position accuracy started degrading fast. The error in the East component increased to a maximum of about 600 meters, North component to a maximum of about 200 meters and the vertical component to a maximum of about 100 meters. The horizontal RMS error of the whole data set, including also the 48 seconds of good quality data, was 168.9 meters and the vertical RMS was 41 meters. Table 1 shows the error statistics. As a conclusion it may be stated that the wideband jamming has drastic effects on singlefrequency single-receiver GPS positioning.
Jamming BeiDou
The effect of jamming on the BeiDou signal was examined also by using the wideband jammer presented above. Six BeiDou satellites were visible at the time of data collection; however one of them was very low elevated, (less than 5 degrees), and therefore the software receiver was unable to acquire one satellite, the satellite with PRN number 2.
After 48 seconds had elapsed from the start of the data collection, the signal was exposed to jamming. Figure 4 shows the C/N0 values for the tracked BeiDou satellite before and during jamming. The C/N0 values were good for three satellites, namely over 42 dBHz and moderate for two satellites, namely between 38 and 40 dB-Hz. The jamming device transmits a chirp signal centered at L1/E1 frequency with a bandwidth of 16.3 MHz. It was anticipated that the jammer would have no or very little effect on the BeiDou signal with a center frequency 14 MHz off from the GPS center frequency. Surprisingly, as Figure 4 shows, there was a drop of maximum 10 dB on the C/N0 values for each individual BeiDou satellite.
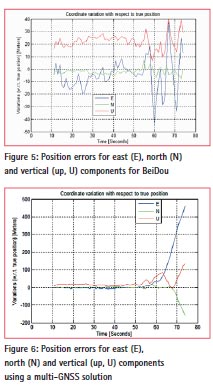
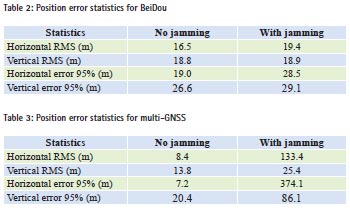
Unfortunately, one of the five satellites observed was not signed healthy (PRN 13) and therefore was not used for computing the position solution. The predominant situation at the time of data collection, i.e. the possibility to use only four satellites and having a poor user-satellite geometry (PDOP was 7.3) resulted in a deteriorated position solution as can be seen in Figure 5. The BeiDou satellite vehicles used in the experiment were PRNs 5, 7, 9 and 10. PRN 5 is a GEO satellite and all others are IGSO satellites, and therefore the signals had to travel much longer distances than the signals transmitted from the MEO satellites. Therefore the BeiDou signals used in the experiments were noisier than those from GPS. The error in the position vertical component was around 20 meters and varied a lot in the East component, being 20 meters in the worst case, even when no interference was present. The error in the North component stayed acceptable, below 10 meters at all times. The horizontal RMS error was 16.5 meters and vertical 18.8 meters. When the jammer was turned on the position solution degraded, the effect was significant especially on the East component. The RMS errors for the whole dataset were 19.4 meters for horizontal and 18.9 meters for vertical position. Table 2 shows the error statistics. As a conclusion it may be stated that the BeiDou position solution is also affected moderately by a wideband jamming device manufactured to interfere the GPS signals despite of the 14 MHz difference in the center frequency of the systems.
Jamming Multi-GNSS
Lastly, the data was processed using a multi-GNSS approach, namely by combining the GPS and the BeiDou signals. The benefit of the multi-GNSS solution is that due to the greater amount of satellites being used the user-satellite geometry is improved resulting into smaller DOP values. In this multi-GNSS experiment, the PDOP was namely 1.55. However, the number of unknowns to be solved in the navigation equations increases by one, as also the time difference between the two systems has to be accommodated for. Therefore, the number of independent measurements decreases and in a sense we lose the measurements of one satellite. Figure 6 shows the errors in the multi- GNSS position solution. The position root mean square errors increased using the multi-GNSS solution with respect to GPS only solution, the horizontal RMS error being 8.4 and vertical 13.8 meters, when no jamming was present. This was possibly due to the fact explained above that measurements from one satellite are lost due to the increase of unknowns in the navigation solution equations as well as the lack of the receiver autonomous integrity monitoring (RAIM) for satellite selection allowing the inaccurate BeiDou measurements distort the position solution. Using RAIM the navigation solution could be computed using the most profitable combination of satellites; selecting the ones providing the best quality signals and the best user-tosatellite geometry. The development of RAIM algorithms into the FGI-GSRx is a subject for future research. When the jamming device was turned on, the horizontal RMS error obtained using the whole data set was 133.4 meters and vertical 25.4 meters, both being worse than obtained using BeiDou only (19.4 and 18.9, respectively). The RMS errors obtained using multi-GNSS were less than with GPS-only (horizontal 168.9 and vertical 41 meters using GPS). Table 3 shows the error statistics.
As a conclusion it may be stated that even without RAIM the multi-GNSS solution provides better performance than BeiDou only solution, when no jamming is encountered and better performance than GPS in a jamming situation.
Conclusions
This paper assessed the impact of a cheap commercial jamming device on the BeiDou signal. The effects were monitored by examining the C/N0 values and the obtained position solution. The results were compared to the corresponding results obtained using GPS. The impact of the jammer was significant on GPS, as was known from previous research, but surprisingly it deteriorated the BeiDou performance slightly too. However, the impact was not as drastic as on GPS, the increase of the position errors was in the range of meters, as for GPS there was an increase of hundreds of meters.
A multi-GNSS solution using both GPS and BeiDou interoperable was computed. The position accuracy was worse with respect to GPS only, but much better compared to BeiDou only solution, when no jamming was encountered. However, when the jamming device was turned on, the accuracy was improved with respect to GPS solution, both on the horizontal and vertical components. BeiDou position solution was better on both position components even when jamming device was used due to the specific signal characteristics. The degraded performance of the multi-GNSS solution compared to GPS only, when no jamming was present, was probably a result from the use of all satellites available, and therefore the signals with poor quality deteriorated the solution. Future work consists of implementing the receiver autonomous integrity monitoring (RAIM) algorithms into the software defined receiver, FGI-GSRx. Using RAIM the best combination of satellites, regarding the quality of signals and geometry, could be selected for use and therefore a much better position accuracy obtained.
Acknowledgements
This research has been conducted within the projects DETERJAM (Detection analysis, and risk management of satellite navigation jamming) funded by the Scientific Advisory Board for Defence of the Finnish Ministry of Defence and the Finnish Geodetic Institute, Finland and FINCOMPASS, funded by the Finnish Technology Agency TEKES with the Finnish Geodetic Institute, Nokia Corporation, Roger-GPS Ltd., and Vaisala Ltd.
References
Baek, J., S. Yoo and S.Y. Kim (2012). Jamming Effect Analysis of Two Chinese GNSS BeiDou-II Civil Signals. International Journal of Electrical and Computer Engineering (IJECE) Vol.2, No.6.
Bhuiyan, M. Z. H., S. Söderholm, S. Thombre, L. Ruotsalainen and H. Kuusniemi (2014). Implementation of a Software-defined BeiDou Receiver. In Lecture Notes in Electrical Engineering, Springer, in press.
Borio D., C. O’Driscoll and J. Fortuny (2013). Jammer Impact on Galileo and GPS Receivers. In Proc. ICL-GNSS, Torino, Italy, 1-6.
Borre, K., D.M. Akos, N. Bertelsen, P. Rinder, and S.H. Jensen (2007). A Software Defined GPS and Galileo Receiver – A Single- Frequency Approach. Birkhäuser.
China Satellite Navigation Office. (2012). BeiDou Navigation Satellite System Signal In Space Interface Control Document (2012): Open Service Signal B1I (Version 1.0).
Gibbons, G. (2011). GNSS Interoperability, not so easy after all. Inside GNSS. Gibbons, G. (2013). BeiDou to Restart Satellite Launches Next Year, Shift B1 Signal Frequency after 2016. Inside GNSS News.
IS-GPS-200G. (2012). Navstar GPS space segment / Navigation User Interfaces. Global Posi-tioning Systems Directorate
Jiang, Z. (2004). Mitigation of Narrow Band Interference on Software Receivers based on Spectrum Analysis. MSc Thesis, published as UCGE Report No. 20202, Department of Geomatics Engineering, University of Calgary, Canada.
Kaplan, E. and D. Hegarty, eds. (2006). Understanding GPS Principles and Applications. Norwood, Ma, USA: Arctech House.
Kuusniemi, H., E. Airos, M.Z.H. Bhuiyan and T: Kröger (2012). GNSS jammers: how vulnerable are consumer grade satellite navigation receivers? European Journal of Navigation. 10(2), 14-21.
Kuusniemi, H., M.Z.H. Bhuiyan and T. Kröger (2013). Signal Quality Indicators and Reliability Testing for Spoof-Resistant GNSS Receivers. European Journal of Navigation 08/2013; 11(2):12-19.
Mitch, R.H., R.C. Dougherty, M.L. Psiaki, S.P. Powell, B.W. O’Hanlon, J.A. Bhatti and T.E. Humphreys (2011). Signal characteristics of civil GPS jammers. ION GNSS, Portland, OR, September 19-23.
Montenbruck, O., A. Hauschild, P. Steigenberger, U. Hugentobler, P. Teunissen and S. Nakamura (2013) Initial assessment of the COMPASS/ BeiDou-2 regional navigation satellite system. GPS Solutions, 17(2), 211-222.
Nottingham Scientific Limited (2013) Delivering Reliable and Robust GNSS, available online (retrieved on 10 November, 2013): http://www. nsl.eu.com/datasheets/stereo.pdf.
Pullen S. and G.X Gao (2012). GNSS Jamming in the Name of Privacy, potential threat to GPS aviation. Inside GNSS, March/April.
Ruotsalainen, L., M.Z.H. Bhuiyan, H. Kuusniemi and S. Söderholm (2013). Preliminary Investigation of Deeply- Coupled Galileo and Self-Contained Sensor Integration for Interference Mitigation. In Proceedings of ESA/ GSA 4th International Colloquium: Scientific and Fundamental Aspects of the Galileo Programme, 4-6 December, Prague, Czech Republic.
This paper has been presented in ENC-GNSS 2014, Rotterdam, Netherlands, 15-17 April.












 (4 votes, average: 1.50 out of 5)
(4 votes, average: 1.50 out of 5)




Leave your response!