| GNSS | |
A look into the future of positioning, navigation and timing
The world urgently needs an even stronger, more resilient and more versatile PNT infrastructure |
 |
|
The present Position, Navigation and Timing (PNT) world infrastructure is mainly based on the American Global Positioning System (GPS), complemented by other Global Navigation Satellite Systems, such as the Russian GLONASS and the forthcoming European Galileo and Chinese Beidou.
Regional navigation satellite systems, such as The Indian Regional Navigational Satellite System (IRNSS) and the Japanese Quasi-Zenith Satellite System (QZSS), are also important components of the present worldwide scenario.
The multi-constellation has already proved to be a safeguard against massive outages of one constellation. However, present GNSSs and GPS “in primis”, are very vulnerable to jamming and spoofing attacks.
These are the reasons why alternative non-GNSS PNT systems and technologies are being developed worldwide.
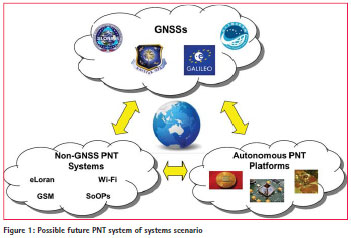
In the not so far future, a PNT system of systems, including GNSS and non- GNSS infrastructures, is likely to take place; while, at user receiver level, a fusion of data from GNSS and other sensors (such as inertial platforms, Wi- fi, GSM, signals of opportunity, etc.) will become normal practice (figure 1).
Introduction
On April 1, 2014, GLONASS, the Russian GNSS, experienced a system-wide 12-hour blackout, apparently due to the uploading of wrong ephemeris data from the ground segment to the satellites in orbit.
The accident demonstrated that complex systems such as GNSS’ need to be supported and operated by dedicated organizations responsible for their operations, use and ultimately, quality of service.
Large and complex systems are otherwise vulnerable: state-of-the-art technologies and well-conceived system architectures can hardly compensate for weaknesses in operational and service provision processes and procedures.
On the other hand, the GLONASS blackout also confirmed that the multi-GNSS approach, presently being adopted in most civilian and mass-market applications, is very resilient against even total failures of one constellation. Presently, there are no mass-market devices, even in Russia, that use exclusively GLONASS, so that no major consequences were suffered from the black-out.
However, each individual GNSS is intrinsically affected by many vulnerabilities and limitations.
Because of the weakness of their radio signals, GNSSs can be easily jammed and spoofed. This problem is becoming terribly serious, also due to the proliferation of commercially available jamming equipment that are relatively inexpensive yet very sophisticated.
Weak radio signals also make GNSSs incapable to work indoors, underground and underwater.
GNSS Multi- Constellation Scenario
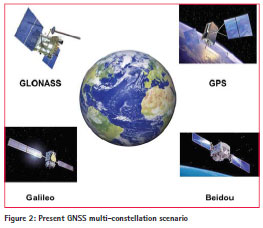
At present, the world is experiencing a proliferation of GNSS constellations: two fully fledged and operational constellations (GPS and GLONASS), along with two more (Galileo and Beidou) under development (Beidou is actually already operational over the Asian region). In addition, regional constellations are in highly inclined or geostationary orbits, such as the Japanese QZSS and the Indian IRNSS (figure 2).
The situation in space would seem to be rather crowded and this is no exaggeration.
Then all of a sudden, GLONASS’ massive and worldwide system outages in April in 2014 made everybody understand that the world’s dependence on GNSS was so high that one could not risk to get anything less than wellfunctioning navigation satellites in orbit. Moreover, the world sometimes faces critical political situations that force others to start doubting the repeatedly stated full interoperability and compatibility among all GNSSs.
A closer look at the problems would suggest that the solution should be qualitative rather than quantitative. We need well operated systems supported by effective management organization, with fool-proof processes able to compensate for the inevitable bugs of the technology and guarantee vis-à-vis the users continuity and quality of the service provided.
This serviceoriented approach is well presented in the genetic code of the Galileo system.
European Commission, European GNSS Agency (GSA) and European Space Agency are all together spending a substantial effort to set the path towards the forthcoming Galileo service exploitation phase.
A focal role will be played in this perspective by the GSA based in Prague, which in its role of Core Service Provider will have the responsibility to guarantee performance, continuity and availability of the Galileo signals to users, customers and stakeholders in Europe and worldwide.
Today, more than ever before, Galileo, a system conceived from the beginning to be compatible and interoperable with GPS and with a strong focus on civilian services, could play a strategic role in the future GNSSs scenario.
GNSS Limitations, Threats and Vulnerabilities
GPS or, more generally, the GNSS concept, suffers from some well-known intrinsic system limitations. They mainly derive from the poor quality of signal reception. GNSS signals, propagating from the satellites to the user receiver, are weak and cannot penetrate well liquid and solid obstacles, such as sea water, soil, concrete buildings, etc.
Therefore, weak radio signals make GNSSs incapable of working indoors, underground and underwater. On the other hand, a reliable and accurate PNT would be mostly useful just in the above situations.
Indoor navigation would have many important applications both in commercial (eg., assets management) and emergency environments (fires, natural disasters, etc.).
Similarly, subsurface marine navigation (submarines) and underground positioning and surveying (tunnels, mines) would benefit greatly from a suitable PNT infrastructure.
It is also often forgotten that the weak GNSS signals can be swamped by solar flares and storms, as already experienced in the past.
Finally, the recent GLONASS system wide outage confirmed something well known: Figure 2: Present GNSS multi-constellation scenario large and complex systems can fail.
Apart from its limitations, GNSSs are vulnerable systems, at least as far as civilian applications are concerned.
In 2013, ‘The Economist’ reported in an article titled ‘Out of sight’, about the daily 10-minute jamming of GPS signals near the London Stock Exchange. Most likely, the problem was unintentionally but still culpably caused by a delivery driver dodging his bosses’ attempts to track him.
The main threat to the integrity of GPS and, in general, GNSS signals are posed by a growing number of jamming and spoofing devices that are commercially available and that can be purchased even online (figure 3).

To understand the potential risk derived from jamming, one should realize how tightly linked are our society critical infrastructures to GNSS (mainly GPS). As a matter of examples, cell phones towers and electrical grid systems use GNSS signals for time synchronization: jamming can throw them off and cause outages. Not to mention the potentially disastrous effects of GNSS jamming onto air traffic management inflight and at airports (although, airplanes still rely on non- GNSS, autonomous navigation systems).
Intentional jamming is also possible. North Korea for instance, has already experimented with this technology, reportedly blocking GPS signals in South Korea on several occasions.
North Korea used big lorry-mounted jammers to block GPS signals in South Korea up to 100 km away. Starting with a four-day burst in August 2010, the attacks which come from three positions inside North Korea, have lengthened. In early 2012, they ran for 16 days causing 1,016 aircraft and 254 ships to report disruption.
Spoofing is a more subtle and slightly more difficult way to harm and attack the GNSS infrastructure.
The threat is based on the possibility to generate, through relatively inexpensive and technologically simple equipment, fake replicas of GNSS signals. In this way, it is possible to provide to the attacked user or infrastructure, inaccurate information about both location and time.
The reality of this type of threat was glamorously proven last year by a team of researchers from the University of Texas. They boarded a 65-meter, $80 million luxury yacht named ‘White Rose of the Drachs’, sailing from Monaco to the island of Rhodes in the Mediterranean (figure 4)
 .
.
While in international waters some 50 km off the coast of Italy, the team, using just a laptop, an antenna and a ‘spoofing’ device (a total investment of about USD 3,000), managed to overpower the authentic GPS signals with fake ones and gain control over the yacht’s navigation system, deviating its course from the original one.
The same approach could be used to hijack commercial airliners, although these are still somehow less dependent on GNSS navigation.
The general feeling is that in order to circumvent the present limitations and vulnerabilities of GNSS, alternative and/ or complementary PNT approaches have to be adopted. The ultimate goal is that of a truly resilient PNT infrastructure, based not on a single system or family of systems, but on complementary and dissimilar systems. As Dana Goward of the Resilient Navigation and Timing Foundation stated at this year’s European Navigation Conference (ENC 2014) in Rotterdam, “GNSS vulnerability is a massive mudslide waiting to happen.”
Non-GNSS PNT Alternatives
The US Defense Advanced Research Projects Agency (DARPA) launched the ‘All Source Positioning and Navigation (ASPN)’ program, aiming at the development of a multisensor fusion system that is able to offer low cost navigation on any operational platform and in any environment, with or without GPS.
The concept is based on a swift integration of various possible sensors with a sort of ‘plug-andplay’ open architecture approach.
Besides a multi-GNSS receiver, the core of the system will be an Inertial Measurement Unit (IMU) associated with an atomic clock, allowing the socalled ‘dead-reckoning’ navigation. Other sensors could also be integrated such as electronic compasses, 3D imagers, LiDAR, laser rangers, radio receivers (to take advantage of the so-called signals of opportunity, SoOPs) and even stellar sensors.
An affordable, low-cost and lowmass realization of the multi-sensor platform is made possible by advanced microelectronic technologies together with powerful processing algorithms.
The present state-of-the-art is a single chip Timing and Inertial Measurement Unit (TIMU), containing a six axis IMU (three gyroscopes and three accelerometers) and integrating a highly accurate master clock into a single miniature system, smaller than the size of a penny (figure 5).
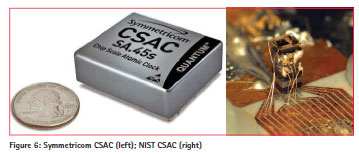
Chip scale atomic clocks (CSACs) are also available and will be soon integrated in future generation TIMU’s (figure 6). They can already achieve stabilities in the order of 1 microsecond per day with associated power consumptions compatible with battery operation.
It is very likely that in the future, both for civilian and military applications, a single chip with powerful data fusion capabilities will integrate a multi-GNSS receiver and a TIMU.
Moreover, Personal Digital Assistant (PDA) devices such as smartphones, will further develop their location capabilities based on Wi-fi, GMS and other ‘signals of opportunity’ through the so-called Wireless Local Positioning Systems (WLPSs).
Unlike GPS or other global navigation satellite systems, local positioning systems do not provide global coverage. They use RF beacons with a limited range, including cellular base stations, Wi-fiaccess points and radio or TV broadcast towers.
Among the non-GNSS PNT systems, a raising attention is gained by eLoran (Enhanced Loran).
eLoran is an internationally-standardized positioning, navigation, and timing (PNT) system concept which can be considered the last and modernized version in the long-standing and proven series of low-frequency, LOng-RAnge Navigation (LORAN) systems.
eLoran meets the accuracy, availability, integrity, and continuity performance requirements for aviation non-precision instrument approaches, maritime harbor entrance and approach maneuvers, landmobile vehicle navigation, and locationbased services. It is also a precise source of time and frequency for applications such as telecommunications.
The increasing interest in this PNT system, however, does not derive from its performance, although comparable in terms of accuracy, availability, continuity and integrity with that of GNSS.
The attractiveness of eLoran relies mostly on being independent, dissimilar and yet complementary to the existing Global Navigation Satellite Systems presently in use.
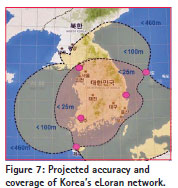
After the already mentioned North Korean GPS jamming attacks, exploiting the vulnerability of the very low-powered GPS signals, South Korea announced in 2013 a nationwide eLoran navigation project under which the entire country will be covered by the new system in 2016, with 20-meter position accuracy (figure 7).
A PNT System of Systems
A likely future scenario starts appearing: that of an integrated PNT world infrastructure, a system of systems including present and future GNSSs (with all the associated local and wide area augmentation networks, such as EGNOS), non-GNSS systems (e.g., eLoran, WLPSs) and autonomous navigation platforms at user level.
Data deriving from different systems and platforms will be seamlessly ‘fused’ at user receiver level, guaranteeing a high degree of availability and continuity.
The integrity of time and position data will be more easily assessed by the user himself, comparing different sources and spotting discrepancies.
Jamming and spoofing will be more difficult to exercise and more easily detected as the user will no longer rely on a single source of information.
The above scenario is a natural evolution of the multi-constellation GNSS approach that has already demonstrated its effectiveness during the GLONASS outages, as well as in harsh environments (e.g., urban canyons).
However, in order for this vision to materialize, three conditions need to be verified;
a. To proceed along the path of compatibility and interoperability among GNSSs to the maximum possible extent;
b. To assure that each GNSS be supported by very effective, servicecentered organizations monitoring their performance through a severe KPIs process and aiming at continuously improving it;
c. To further develop technologies and platforms allowing a seamless data fusion of PNT information at user level.
Conclusion
Whether we like it or not, our society has become essentially dependent on the world Positioning, Navigation and Timing infrastructure today, mainly based on GNSSs and more specifically on GPS.
The advent of GNSS has made possible numerous advances in all area of our manufacturing and service economies and many critical infrastructures of our society would literally collapse in case of a total, worldwide GNSS failure.
The world urgently needs an even stronger, more resilient and more versatile PNT infrastructure.
The answer to this need should come from a consolidation of the GNSS system of systems, pursuing the objectives of compatibility and interoperability among the systems. In this respect, the European GNSS Galileo could play a vital role, being the most compatible and interoperable with GPS and because of its strong service orientation.
In parallel, the development of non- GNSS solutions and of autonomous platforms and technologies will go in the direction of a worldwide, totally integrated PNT system of systems that are able to resolve to a large extent all present limitations and vulnerabilities.
All views expressed in this article are those of the author and do not necessarily represent the views of, and should not be attributed to, the European Space Agency.












 (5 votes, average: 3.40 out of 5)
(5 votes, average: 3.40 out of 5)




Leave your response!