| GNSS | |
Multi-Constellation GNSS based on next generation RAIM
This paper proposes different operational scenarios that allow to better characterisation of ARAIM performance to meet RNP0.1 requirements as well as current ADS-B mandates. The promising results are used to initiate practical implementation analysis and trade off discussion about the ARAIM architecture for H-ARAIM development in a civil aviation receiver |
 |
|
 |
|
 |
|
 |
|
 |
|
Because receiver autonomous integrity monitoring (RAIM) techniques are based on measurement redundancy, multi-constellation signals will have a positive impact in principle on the integrity monitoring performance of RAIM algorithms. Increasing reliability and resilience of next generation GNSS services is an agreed objective of the Global Air Navigation Plan agreed by ICAO member states. Service robustness is also a key performance indicator as introduced in the GPS-Galileo Concept of Operation developed by the EUROCAE WG62.This includes supporting approaches to landing with lateral as well as vertical guidance to achieve an increased level of safety and other operational and environmental benefits. However, current assumptions being used for RAIM based on single frequency GPS no longer hold true in a multi-constellation architecture. Consequently, this paper investigates updates required to implement future multi-constellation RAIM algorithms and evaluates associated system implications and performance.
Separate from any benefit has been recognized within standardisation bodies such as RTCA SC 159 and EUROCAE WG62, that multi-constellation and multi-frequency technology (MCMF) brings issues concerning avionics processing power, complexity of operational modes and the number of core constellations to be used. Furthermore, current investigations on MCMF Advanced RAIM (ARAIM) for vertical approach guidance have introduced a ground segment or Integrity Support Message (ISM) which increases cost and complexity and may impact implementation timescales. While the ISM does provide fl exibility which has the potential to reduce the cost of future upgrades, it is not sure if and in which form it is required for horizontal guidance and positioning applications. The paper evaluates these trade-offs focusing in particular on horizontal positioning and associated implementation issues including an evaluation of operational requirements in light of how positioning performance impacts the quality of aircraft fl ight path guidance.
Based on these identified system trade-offs, the paper evaluates the achievable level of performance for various navigation and surveillance operations in several operational contexts. The operational contexts cover dual frequency test case, single frequency test case, nominal and degraded constellation configuration and different failure scenarios from optimistic to pessimistic. The idea behind the development of those operational contexts is to get a clear picture of the needs of horizontal advanced RAIM to sustain robust horizontal operation in civil aviation. An analysis of the results obtained under those operation contexts is performed leading to recommendations on the H-ARAIM concept discussion in the Working Group C (WGC) of the EU-US Cooperation on Satellite Navigation.
Mission requirements description
ARAIM is being designed to globally provide localizer performance with vertical guidance (LPV) approaches. It also includes a horizontal only guidance function. The development of such techniques highlights limitations to the current RAIM function already standardised for non-precision approach. Indeed, RAIM algorithms operating on the basis of only one constellation (i.e. GPS), have been built on the assumption of a single satellite failure with no consideration for a GPS constellation-wide failure. Considering the safety criticality of the operation served by GPS + RAIM equipment, those assumptions were acceptable. In a multiple constellation environment however, this may not be the case because an overall failure of a given constellation will not be observable in the range measurements of the other constellation. This could induce non acceptable errors. Considering the number of satellites signal available at the receiver antenna in a multiple constellation environment, the assumption of only a single satellite fault at a given time also becomes difficult to justify considering current core constellation standards or observation [SPS] [Heng]. In that perspective, standardisation bodies and civil aviation institution have identified that advanced RAIM algorithm are of interest to augment new generation of multi-constellation equipment even in case when precision approach is not the targeted operation.
In addition, ARAIM concept [GEAS] introduces an ISM component that should provide to the user information from ground observations to help the user algorithm meeting LPV requirements. The current work on ISM such as its architecture and means of dissemination show that this component may not be fully defined in a 2020 timeframe. Indeed, some questions linked to the certification, feasibility, sovereignty have been asked and are not trivial to answer. Nevertheless, in order to find a positive trade-off in the a quick implementation of ARAIM in a 2020 timeframe, it is of interest to investigate if a solution can be described obviating the need for a dynamically updatable ISM component for horizontal-only based operations.
Navigation operations
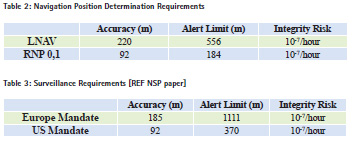
It is well known that current RAIM augmentation may lead to RAIM operational holes for non-precision approach especially when a normalised minimum GPS constellation is taken into account [DO229D]. In that purpose lateral navigation type of operation which provides requirement equivalent to non-precision approach in terms of alarm limit is of interest. Performance results for LNAV can be used to assess the robustness of H-ARAIM solution.
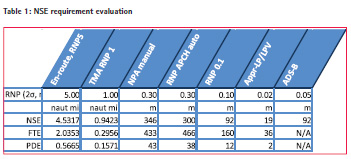
In addition, investigations have been conducted to identify additional navigation operations that may become achievable with DFMC + ARAIM equipment. The International Civil Aviation Organisation (ICAO) has defined in its Performance Based Manual (PBN) [PBN], civil aviation needs in terms of navigation. The most stringent horizontal only positioning performance level that could be found is called RNP 0.1 NM. The RNP 0.1 requirements are specified for the overall aircraft meaning that it refers to the total system error including the navigation system error (NSE), path definition error (PDE) and the fl ight technical error (FTE). The NSE is caused primarily by the position determination function which, in our case comprises GNSS DFMC + ARAIM. The FTE is a function of the aircraft system architecture and equipage level, specifically the design of the fl ight guidance and control system.
For RNP0.1 operation, the overall (TSE) accuracy required is ±0.1 NM (95%) and the integrity required is ±0.2 NM (1- 10-5). An analysis has been conducted to deduce, from different aircraft architectures, the NSE requirements for different PBN applications including RNP 0.1 (see [PBN]). The outcome of the analysis has been presented to the EUROCAE WG62 meeting [EUROCAE]. The group provided as a feedback that the information used in the standardsbibliography to deduce the NSE was obsolete given current equipment performance but, in the meantime, no new reference can be made available.
Subsequently, no consensus could be reached with the aircraft OEM on revised or improved allocation values. It was therefore decided to follow the WGC ARAIM TSG 50/50 split [MSII] of the TSE requirement among the NSE and FTE to assess the availability of the DFMC + ARAIM equipment toward RNP0.1 operation.
Table 2 summarize the operational requirement of the navigation operation evaluated in this article.
Surveillance operation
Although GNSS is associated primarily with navigation, GNSS is also the backbone of Automatic Dependent Surveillance – Broadcast (ADS-B) applications. As such, GNSS positioning and track-keeping functions are no longer “confined” to navigation enablers but become an ATS surveillance enabler. ADS-B is recognized as a key enabler for new surveillance applications to improve the Air Traffic Management (ATM) system.
Although GNSS is not a minimum requirement to support ADS-B applications, in practice, the information transmitted through ADS-B will actually be based on GNSS (assumed to be GPS in current RTCA/ EUROCAE standards). Consequently, any variations in the GNSS performances will have an effect on ADS-B operations.
Different countries in the world have started to develop ADS-B implementation through mandates based on current standards. Two types of mandates have been issued currently:
• ADS-B mandate targeting nonradar airspace with the objective to provide radar-like separation services (e.g. Australia, Canada, Singapore, Fiji, Vietnam, etc.).
• ADS-B mandate targeting ADS-B use in addition to radar and not as the only surveillance source. This kind of ADS-B mandate has been issued in Europe and in the United States.
The second case is the most constraining one based on RTCA DO-260B and EUROCAE ED-102A [DO 260]. Recent activity indicates that there may be issues to satisfactory meet the US ADS-B mandate with current GPS+RAIM equipment in the long term. This on-going analysis requires further investigation and evidence. Nevertheless, there is an interest to investigate if DFMC + ARAIM significantly improve the performance and robustness of such operations.
Table 3 summarizes the operational requirements of the ADS-B mandates as evaluated in this article.
GNSS environment and operational scenarios
This section details the GNSS operational environment that has been considered to assess the performance of DFMC+ARAIM equipment for the navigation and surveillance application introduced in previous section. Operational scenarios have been set up based on the defined GNSS environment in order to obtain a better knowledge of the performance of the ARAIM algorithm in nominal conditions but also in potential reversion mode of the future DFMC + ARAIM equipment. The method adopted to build those scenarios has been established to assess the sensitivity of the algorithm towards the receiver environment and operational constraints.
GNSS environment
The GNSS environment retains for the assessment of ARAIM performances is a dual frequency multi-constellation system (DFMC) that is expected to be available in a 2020 timeframe. Multiconstellation refers to GPS and Galileo in this article. Multi-frequency refers to L1/ L5 frequencies in the GPS case and E1/ E5a frequencies in the Galileo case.
It is assumed that future receivers will be capable to provide sufficient channels to be capable to track all satellites in view, even if maybe not all of them will be processed. An “all-in view” approach is adopted with a receiver mask angle of 5° for GPS and Galileo.
GPS constellation is simulated according to GPS SPS document [SPS] leading to a nominal case of 24 satellites or an extended case of 27 satellites. GPS 24 satellites configuration doesn’t represent a minimum guaranteed state. This configuration is supposed to be available approximately 95% of the time. There is a non-negligible probability of approximately 3.5 % that the constellation may downgrade to 23 satellites. In that respect, 23 GPS constellation case is also considered in the study.
Galileo constellation specification has recently been changed from a 27 satellites constellation to a 24 satellites constellation [IOV]. The European commission adopted a step wise approach for the deployment of the Galileo system leading to 2 major milestones: FOC1 (or IOC) and FOC [IOV]. FOC1 configuration is defined with 18 satellites:
• Plane A / Slots 2, 3, 5, 8
• Plane B / Slots 2, 3, 4, 5, 6, 8
• Plane C / Slots 1, 2, 3, 4, 5, 6, 7, 8
FOC configuration is based on 24 satellites (every 8 slots in the 3 orbital planes) plus 6 spares satellites. Almanac information on the Keplerian coordinates associated to this new satellite configuration is provided in [IOV]. The FOC configuration represents a priori a minimum configuration of the constellation as 2 spares per orbit will be present to replace any faulty satellite. The constellation management plan currently anticipates that a new launch of a spare satellite will be done as soon as the two spares on one orbit are used for operation. This would maintain the number of satellites in that orbit at 8 + 2. There is a risk that a third satellite fails before new spare satellites are deployed in the orbit. This risk is linked to the reactivity of the Galileo program to launch two additional spares when all spare satellites in one orbit are used. In that respect a 23 satellites configuration is considered as degraded configuration in the study. More information on this 23+23 scenario case is presented in the next section.
Operational scenarios
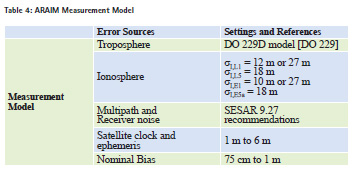
The operational scenarios are elaborated such that an analysis of the robustness and operational benefits of an ARAIM DFMC receiver for horizontal based operation is possible. First of all, the models representing the error budget associated to the various sources of positioning error affecting the satellite to ARAIM user receiver channel per constellation have to be defined. The measurement error budget has to take into account the following contributions:
• Orbit determination and synchronization equivalent error
• Troposphere residual error
• Ionosphere residual error
• Multipath residual error
• Receiver noise residual error
Most of conventional RAIM measurement model assumes that satellite ranging errors have a zero mean Gaussian distribution [DO 229]. For integrity monitoring of more stringent applications than non-precision approach, this assumption has been criticised [GEAS]. Indeed the GEAS group explicitly considered the presence of biases in the range measurements and has designed a RAIM algorithm to protect against the worst case distribution, which occurs when the contributions from these biases to user position error all have the same sign. Therefore, each satellite ranging error is modelled as a combination of random and bias error components. This philosophy has been kept in the WGC ARAIM algorithm [Blanch]. As it follows from statistical analysis, the impact of bias error components increases the probability of false alarm and, also the probability of missed detection. Two these factors lead to the reduction of the detection function availability while providing better protection level figure.
The global pseudorange error variance of the random contribution is computed as follow:
![]()
The nominal bias parameter (bnom) represents the overbounding terms of all bias terms that could affect the pseudorange measurement.
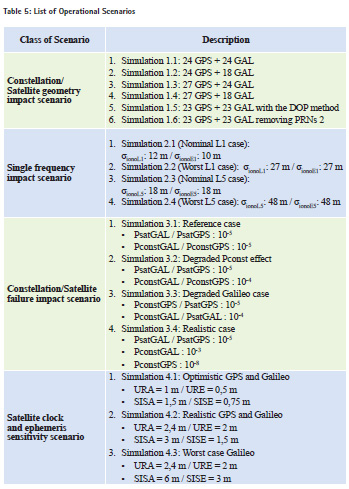
Table 4 provides the references of the models used to define the pseudorange error variance of the ARAIM user receiver: The operational scenarios have been elaborated taking into account the potential nominal and fall back mode of the future DFMC receiver and the main inputs related to the ARAIM algorithm processing or the information provided by the ISM in the ARAIM concept of operation [MSII]. Four categories of scenarios have been characterised:
• Constellation/Satellite geometry impact scenario
• Single Frequency impact scenario
• Constellation/Satellite failure impact scenario
• Satellite clock and ephemeris sensitivity scenario
Constellation/Satellite geometry impact scenario
The number of satellites available has usually a significant impact on the autonomous integrity monitoring performance as those techniques rely on the redundancy of the measurements. Today the GPS constellation is very well populated. Nevertheless it seems fair to consider only 24 satellites (eventually extended to 27) for performance assessment as soon as the dual frequency case is the nominal mode of operation. The step wise approach adopted for Galileo may lead to an initial state of 18 followed by a final state of 24. There is an interest to mix the various cases in order to analyse the potential impact of such parameter on ARAIM performance.
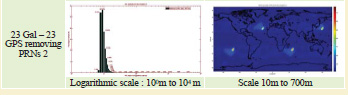
As described in the previous section, a 23+23 configuration may be experienced by ARAIM user. Scenarios have been elaborated on this configuration. The methodology used for the 23+23 simulation is to first identify the couple of GPS and Galileo satellite that that will impact the most the DOP when they are removed from the solution at each epoch and location. Based on this result, the ARAIM algorithm is launched in a second step without this specific couple of satellite at each epoch and location. This method is not a practical case but will provide conservative results in terms of performance degradation at each location in a 23 + 23 satellite scenario. Another method consisting in removing the satellite PRN 2 of each constellation is also considered.
The following scenarios have been simulated:
• Simulation 1.1: 24 GPS + 24 GAL
• Simulation 1.2: 24 GPS + 18 GAL
• Simulation 1.3: 27 GPS + 24 GAL
• Simulation 1.4: 27 GPS + 18 GAL
• Simulation 1.5: 23 GPS + 23 GAL with the DOP method
• Simulation 1.6: 23 GPS + 23 GAL removing PRNs 2
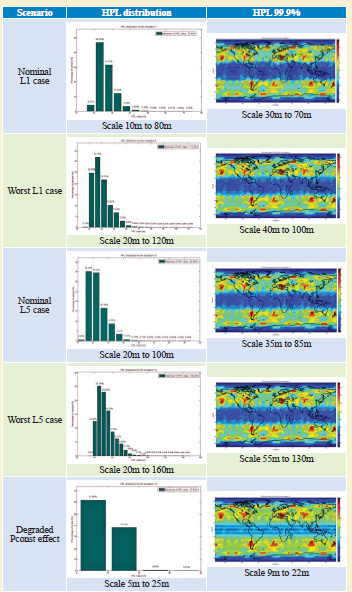
Single frequency impact scenario
The ARAIM receiver may fall back to a single frequency mode in case of interference in one of the two frequencies used. In that respect, the following scenarios have been considered:
• Simulation 2.1 (Nominal L1 case): σionoL1: 12 m / σionoE1: 10 m
• Simulation 2.2 (Worst L1 case): σionoL1: 27 m / σionoE1: 27 m
• Simulation 2.3 (Nominal L5 case): σionoL5: 18 m / σionoE5: 18 m
• Simulation 2.4 (Worst L5 case): σionoL5: 48 m / σionoE5: 48 m
The L5 only scenarios have been elaborated based on L1 scenario references adapted to the L5 frequency environment.
Constellation/Satellite failure impact scenario
It has been recognized that probability of satellite failure and constellation play a significant role in the ARAIM performance for LPV operation. However, there is information available in the standards only for GPS satellite failures [SPS]. Galileo standard development is on-going on this matter and should be available in a 2016 timeframe. Consequently, there is an interest to perform a sensitivity analysis on those parameters in order to anticipate the impact that this may have on user performance. The following scenarios are considered here with the idea GPS is more mature and measurement available that sustain low probability while it is anticipated that Galileo may not commit to the same level of probability of failure initially.
• Simulation 3.1: Reference case
▪ PsatGAL / PsatGPS : 10-5
▪ PconstGAL / PconstGPS : 10-5
• Simulation 3.2: Degraded Pconst effect
▪ PsatGAL / PsatGPS : 10-5
▪ PconstGAL / PconstGPS : 10-4
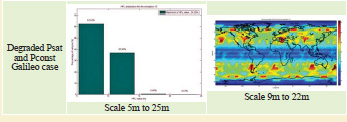
• Simulation 3.3: Degraded Galileo case
▪ PconstGPS / PsatGPS : 10-5
▪ PconstGAL / PsatGAL : 10-4
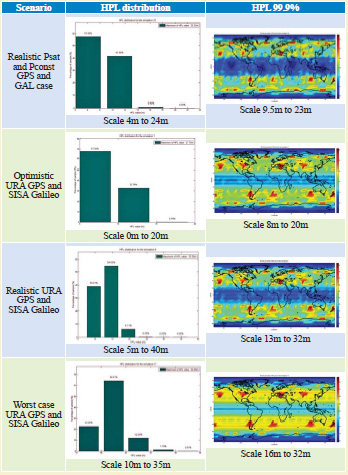
• Simulation 3.4: Realistic case
▪ PsatGAL / PsatGPS : 10-5
▪ PconstGAL : 10-3
▪ PconstGPS : 10-8
Satellite clock and ephemeris sensitivity scenario
ARAIM activity on LPV is relying on assumption that the broadcasted information on satellite clock and ephemeris error bounds (URA for GPS and SISA for Galileo) can be relaxed by comparison to the current URA broadcasted value. Measurement campaign and analysis done by Stanford University has confirmed that such assumption may be realistic. In the other hand, the results presented don’t take into account the full GPS L5 constellation as it has not been fully deployed neither the Galileo satellites. Therefore, this class of scenario targets the assessment of the impact of degraded URA/SISA on ARAIM user performance. The optimistic case was derived from the WGC ARAIM TSG work whereas the realistic and worst case are derived from current GPS performance and Galileo signal in space interface control document information [Galileo].
• Simulation 4.1: Optimistic GPS and Galileo
▪ URA = 1 m / URE = 0,5 m
▪ SISA = 1,5 m / SISE = 0,75 m
• Simulation 4.2: Realistic GPS and Galileo
▪ URA = 2,4 m / URE = 2 m
▪ SISA = 3 m / SISE = 1,5 m
• Simulation 4.3: Worst case Galileo
▪ URA = 2,4 m / URE = 2 m
▪ SISA = 6 m / SISE = 3 m
Summary of the operational scenarios investigated
Table 5 summarizes the operational scenarios defined in this article.
Simulation results and analysis
Simulation environment The ARAIM results that are presented in the next section has been realised based on a simulation platform implementing an ARAIM algorithm introduced in [Blanch] and using the platform configuration as mentioned in Table 6:
Results analysis
The simulation results are provided in the core article section through tables bellow including the 99.9% horizontal protection level (HPL) figure and availability of the ARAIM user as a function of the operational requirements used in this study. The 99.9% HPL represents means the maximum of the 99.9 percentile of the HPL distribution on each user point tested over the globe. It is anticipated that such information can solve issue introduced in section 2 on the FTE/NSE requirement allocation as one can deduce the NSE achievable at 99.9% with the ARAIM algorithm for the tested operational scenario.
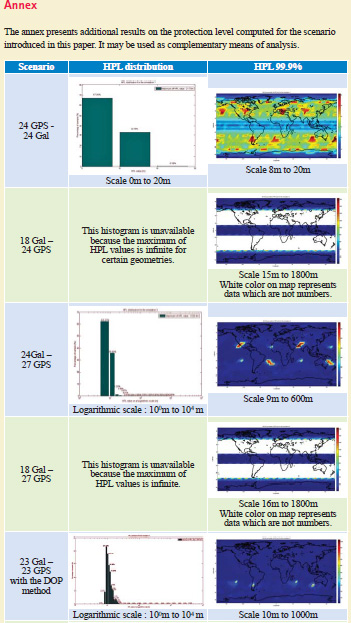
Maps of the HPL and HPL distribution figures are provided in addition in an Annex section (in the box accompanying this article).
The results have been realised based on the following setting. Table 5 provides the specific parameter change state that has been set in each operational scenario. The other parameters are not changed if not indicated.
The results highlight the sensitivity of ARAIM to the constellation design and number of satellites. Under the simulation assumptions and especially considering the 10-5 Psat and Pconst parameters, the algorithm is not capable to provide a protection level when 18 Galileo satellites are simulated. An increased number of satellites don’t necessarily bring additional performance benefits. Indeed, the GPS extended 27 constellations includes a downgrading geometry case with the removal of 3 nominal slots satellites compared to the nominal 24 constellation case. In general, looking at the HPL distribution shows that additional satellites decrease the HPL mean but some satellites geometries are observed affecting the 99.9 statistics of the HPL which is detrimental for the final availability.
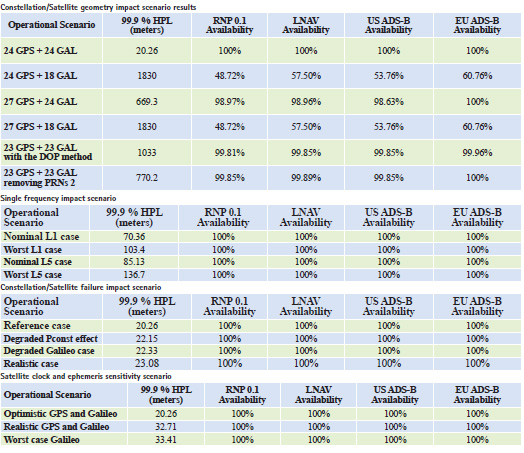
The methodology propose to assess the impact of downgraded constellation to 23 based on the DOP is more conservative than the one based on PRN 2 removal. While it doesn’t represent a physical situation, it provides the benefits to show the worst case cumulated situation over the user grid of a loss of one GPS and one Galileo satellite. 99% availability is available for all operation of interest in such 23 + 23 downgraded constellation cases.
Based on a nominal 24+24 constellation, a 20 m NSE requirement is sufficient to sustain 99.9% of availability which provides a lot of margin for the FTE budget for RNP 0.1 application.
As anticipated, an increase of HPL is observed on the results compare to the dual frequency case due to the ionosphere budget error but in the meantime the availability of all applications has not been impacted. The 99.9 % HPL metrics indicate that more than 0.1 NM could be allocated to the aircraft FTE even in worse case without impacting the availability of RNP0.1 operation.
Both navigation and surveillance application are covered in a reverted single frequency mode making the H-ARAIM concept robust to the loss of one frequency.
The probability of satellite failure and constellation is a key parameter in LPV 200 analysis done in the past on ARAIM. The results indicate that this is not the case for horizontal based applications as 100 % of availability is reached on all applications for each scenario. The increase of the Galileo Pconst or Psat has an impact but limited as it can be deduced from the 99.9% HPL metrics. Civil aviation may consider in the future high probability of constellation failure for a new core constellation if the second constellation is either performing at a low Pconst or has not been demonstrated to achieve a high Pconst.
Demonstration of Psat/Pconst at 10-3 or 10-4 level from core constellation service provider (CSP) may be sufficient to sustain civil aviation needs for horizontal applications.
Increase values for URA and SISA have a more significant impact on the results than low Psat/Pconst on the 99.9% HPL figure but not on the availability results. The worst case has been built upon the current GPS broadcasted URA value and the worst case SISA that could be encoded by Galileo. It results to an increase of 13 meters on the 99.9 % HPL which still provides a lot of margin compare to the requirements for all horizontal applications.
H-araim implementation discussion
Activity realized under GEAS US program and EU US WGC have highlighted the need of an Integrity Support Message (ISM) helping the ARAIM algorithm to sustain LPV 200 operational requirements. The ISM should provide to all users information such as Psat/Pconst/URA based on a worldwide ground segment monitoring the core constellation signals. The information provided by the ISM could be based on CSP commitment or could be based on observation and monitoring process. In that sense, the ISM may provide to user a fair estimation of some ARAIM parameter allowing to take credit of performing constellation and to mitigate constellation with lower quality of service. Different ISM architectures based on an “on-line” scheme or an “off-line” scheme have been introduced in [REF MSIIB]. It becomes obvious that the ISM and the means to disseminate the information is a key driver in performance/cost/complexity/readiness analysis. An initial step to take credit of the future multi-constellation and dual frequency system available consists in looking at horizontal based application performance needs and assessment of the ISM constraints to sustain those needs. The main interest was to understand if the ISM architecture developed to sustain LPV200 ARAIM operation is still required to sustain horizontal navigation based application with ARAIM. The results presented in the previous section indicate that a regularly updatable ISM as described for vertical ARAIM (V-ARAIM) may not be needed for horizontal ARAIM (H-ARAIM). When looking at the nominal constellation scenarios based on 24 satellites on both GPS and Galileo, the ARAIM algorithm is robust toward the loss of frequency and the most conservative scenario for the probability of failure and the satellite clock/ ephemeris error budget. An ARAIM receiver with fixed and conservative assumption with regards to ISM parameter may be capable to sustain all navigation and surveillance requirements investigated in this paper. However, this does not exclude that an updatable ISM may be useful for other purposes.
An updatable on-board ISM provides benefits in the long term as it can mitigate changes in the quality of service of core constellation without change on the airborne equipment. Nevertheless, receiver manufacturer have expressed some concerns in RTCA SC 159 and EUROCAE WG62 on the complexity and certification burden of such implementation. A trade off may be found on H-ARAIM to set a receiver architecture that can accommodate change in the CSP performance and standardization/certification cost between a fix ISM and a complete updatable ISM.
Conclusion
An extensive analysis of the H-ARAIM performance has been provided in this paper showing that ARAIM is robust to the loss of frequency and can provide 100 % availability for LNAV, RNP01 NM operation, US and EU ADS-B mandates in conservative assumptions for URA, Psat and Pconst. In nominal mode of operation based on optimal 24 + 24 satellites constellations, ARAIM can sustain HPL requirements of 20 m. It provides promising technical feasibility outcomes that may accommodate various aircraft implementation as the NSE will not be a driver. Those results open perspectives to a more relaxed ISM architecture that could lead to an increase in autonomy of the ARAIM integrity algorithm. This solution will definitely ease the implementation, standardization and certification process of a DFMC receiver using an ARAIM algorithm for horizontal based operations.
Acknowlegment
This work has been supported in part by SESAR project 9.27 on Multi-constellation GNSS Receivers. The authors would like to gratefully acknowledge the support from SESAR WP9.27 partners Thales and Honeywell, as well as Juan Blanch from Stanford University.
Disclaimer
The opinions expressed in this paper are those of the authors alone. This paper does not represent any formal positions of EUROCONTROL or the SESAR Joint Undertaking.
References
[Blanch]: Advanced RAIM User Algorithm Description: Integrity Support Message Processing, Fault Detection, Exclusion, and Protection Level Calculation, Juan Blanch, Todd Walter, Per Enge, Young Lee, Boris Pervan, Markus Rippl, Alex Spletter, ION 2012
[DO 229]: SBAS MOPS, RTCA SC 159, December 2006
[DO 260]: Minimum Operational Performance Standards for 1090 MHz Extended Squitter Automatic Dependent Surveillance – Broadcast (ADSB) and Traffic Information Services – Broadcast (TIS-B), RTCA/EUROCAE, DO 260 B / ED 102 A, 2011
[EUROCAE]: Operational Requirement for H-RAIM activity, OF Bleeker, EUROCAE WG62 meeting 37 June 2014
[Galileo]: Galileo Open Service Signal In Space Interface Control Document, European Commission, Issue 1.1, September 2010
[GEAS]: GNSS Evolution Architecture Study Phase II report, GEAS group, February 2010
[Heng]: GLONASS Signal-in-Space Anomalies Since 2009, L. Heng, G. Xingxin Gao, T. Walter, and P. Enge, ION
[IOV]: Galileo IOV results, ESA, EUROCAE WG62 meeting 36 December 2013
[MSII]: Milestone II report, EU-U.S. Cooperation on Satellite Navigation Working Group C-ARAIM Technical Subgroup, February 2015
[PBN]: Performance Based Navigation Manual, ICAO, doc 9613 Vol II
[SPS]: Global Positioning System Standard Positioning Service Performance Standard, Department of Defense – GPS NAVSTAR, 4th edition – September 2008










 (No Ratings Yet)
(No Ratings Yet)






Leave your response!