| GNSS | |
An IGS-based simulator of ionospheric conditions for GNSS positioning quality assessment
Currently in its first development phase, this simulator allows for a rather accurate simulation of the space weather conditions at minimum costs |
 |
|
 |
|
 |
|
The analysis of space weather and ionospheric disturbance effects on satellite navigation, its performance and operation relies upon either the identification of the deteriorating conditions and setting up the GNSS equipment for data collection, or the utilisation of model-based simulators that hopefully resemble the natural conditions of a space weather or an ionospheric event. Here we present an alternative approach, based on the experimentally collected GNSS observations using the International GNSS Service global network of reference stations. In recent development, we have developed an IGS-based statistical learning-driven simulator of ionospheric conditions for GNSS positioning, that examines the requirements given by its user (description of a class of a space weather event with the choice of geographical region and GNSS systems/pseudoranges to be used), finds out the appropriate storm-case through the search of the internet-based archive of space weather indicators, and returns the most suitable IGS RINEX record of GNSS pseudorange observations with which a GNSS (SDR) receiver is to be fed for the space weather/ionospheric effects assessment. Currently in its first development phase, this simulator allows for a rather accurate simulation of the space weather conditions at minimum costs. Future research will be aimed at refining the algorithms for identification of the suitable space weather storm-case by expansion of the related space weather descriptive parameters and deployment of advanced artificial intelligence storm-case selection algorithm.
Space weather is recognised as the single most influential natural source of GNSS positioning performance degradation. With continuously rising number of GNSS-enabled technology and socio-economic applications and services, satellite navigation has become an essential component of the national infrastructure. Risk assessment of satellite navigation utilisation in application and services development requires the ability to assess the GNSS positioning performance in different positioning environment scenarios.
Introduction of the GNSS Software- Defined Radio (SDR) receiver concept offers an invaluable research tool to scientists and engineers. In the SDR deployment, a GNSS receiver is constructed in a manner that minimises specialised hardware processing through transition towards software-based processing. The SDR concept retains the necessary specialised hardware-based signal processing in the Radio-Frequency (RF) domain, while the processing tasks in Base-Band (BB) and Navigation Application (NA) domains are performed with dedicated software run on the general-purpose hardware (an ordinary PC or a smartphone, for instance).
The transition from hardware-specific to software-specific signal processing discloses the GNSS positioning process, rendering it suitable for evaluation and improvement through introduction of new models, processing methods and algorithms that can be easily deployed and evaluated. Research and evaluation can be conducted in the specific domain, without the requirement for utilisation of the whole GNSS positioning process. Finally, the modularity of GNSS SDR software allows for immediate assessment of the effects of new models, methods and algorithms on the over-all GNSS SDR receiver positioning performance, all those without leaving laboratory.
A GNSS SDR receiver may act as a testbed for positioning and error correction models, methods, algorithms and applications performance validation and testing without leaving the laboratory. New research opportunities created by utilisation of the GNSS SDR concept call for an accurate and low-cost simulation of different positioning environment scenarios in laboratory. The ability to mimic various real scenarios in SDRbased environment is recognised as essential for the new generation GNSS applications development. Here we address the opportunities to create real-world utilisation scenarios for the Navigation Application Domain research based on the GNSS SDR environment.
The GNSS positioning performance process in the NA domain is based on the utilisation of two sets of information: raw measured GNSS pseudoranges and information extracted from the received GNSS navigation message.
Satellite-based position estimation is a measurement-based process, thus exposed to systematic and random errors sources of both natural and artificial origin. Those unavoidable leave signatures in received GNSS signals. Signatures of the GNSS positioning environmental effects are brought with the GNSS positioning signals into a GNSS receiver, causing systematic and random errors of GNSS position estimates. The character of both kinds of errors is determined by the nature of the very positioning environment in which the GNSS signals were observed, and by the nature of the GNSS signals distortion. Distorted GNSS signal is then used in GNSS pseudorange measurement.
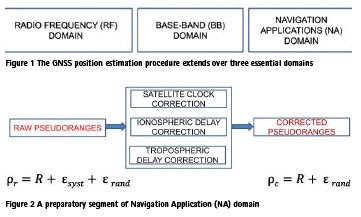
The signatures are duly transferred to NA domain in the form of the error-corrupted GNSS pseudorange observations. A GNSS receiver is designed to attempt to mitigate the systematic errors, at least. The mitigation process involves utilisation of three essential correction models, for which the real-time parameters are usually supplied in satellite navigation message: ionospheric correction model, tropospheric correction model, and satellite clock error correction model. Corrections of satellite clock, ionospheric and tropospheric errors are applied on the observed raw GNSS pseudoranges in the preparatory information process in the NA domain to mitigate known (systematic) GNSS positioning errors. Corrected GNSS pseudoranges will retain random errors, and in that form enter the GNSS position estimation procedure.
Preservation of GNSS positioning environment effects should be avoided in the GNSS positioning estimation procedure. However, it becomes essential for creation of a GNSS SDR laboratory test bed, since it emerges as a natural concept for laboratory simulation of the real GNSS positioning environment.
Two approaches emerge as candidates for GNSS positioning environment simulation development.
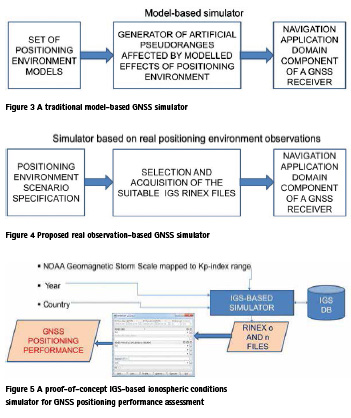
A traditional approach is based on the simulation of the GNSS positioning environment using complex mathematical models of that distort the GNSS signalsin- space (radio signals in RF domain), and generates the RF signal that a GNSS receiver may be fed with using the aerial interface. A traditional simulator engages the complete GNSS architecture in positioning process, assuming the traditional design of a GNSS receiver based on signal processing-specific hardware. Requirements for simulation of a broad range of various scenarios render a traditional GNSS simulator a costly piece of laboratory equipment.
We propose an alternative realobservables approach that preserves the actual GNSS positioning environment conditions for processing in the NA domain, as depicted in Fig X. The approach relies on availability of a large database of GNSS pseudorange observations taken in different positioning scenarios and GNSS positioning environment conditions (space weather/ ionospheric conditions, meteo-conditions, multipath environment conditions etc.). International community, that involves the UN International Committee on GNSS among the other organisations, has managed such a database for decades. Acting under the name of the International GNSS Service (IGS), it continuously collects the GNSS-related observations with 30 s separation 24 hours a day throughout the year using a systematically organised global network of stationary reference stations. Along with dual frequency GPS pseudorange observations, reference stations collect the received navigation messages. Some stations provide additional details on meteorological conditions, or pseudorange observations related to other GNSS systems (GLONASS, Beidou and Galileo). Collected GNSSrelated data are available openly, in a standardised RINEX format, without licence. A user can access data using a web-based interface.
We have demonstrated the concept of real pseudoranges-based GNSS simulator using the IGS database and its webinterface in development of an IGS-based simulator of ionospheric conditions for GNSS positioning quality assessment. We established a simple ontology that allowed us to define the criteria for RINEX data files selection based on an ontological description of position environment conditions scenario.
A positioning environment scenario is specified with the space weather condition (the NOAA Geomagnetic Storm Scale mapped to Kp-index range), year of positioning environment conditions simulation, and the country in which the positioning environment is to be simulated. The IGS-based simulator we prototyped utilises a simple naïve decision tree -method to select the most suitable RINEX data for the required scenario, requests related RINEX files from the IGS database, and stores them on the local data storage for an off-line processing with laboratory GNSS SDR in the NA domain.
The utilisation of the IGS-based GNSS simulators mitigates the effects of modelling errors that inevitably appear when the GNSS signal is artificially modelled, without any investment apart from a standard computing and internetaccess equipment. As the IGS provide its services mainly to scientific community and ask for the services to be used in a fair way, we limited the frequency of the IGS database access in accordance with the IGS recommendations.
Initial validation of the proof-of-concept IGS-based ionospheric conditions simulator for GNSS positioning performance assessment shows the results beyond the expectations.
Our team continue research activities on advancement of the ontology development for the GNSS positioning environment scenario description, development of the neural network-founded expert system for IGS-based GNSS positioning environment simulation, and the system expansion for provision both pseudorangefeeding (to NA domain of a GNSS SDR) and signal-feeding (to BB domain of a GNSS SDR) simulator capabilities.
Acknowledgements
This report is based on the presentation given by two leading authors at the UN/ USA Workshop on International Space Weather Initiative (ISWI) held at Boston College, Boston, MA, 31 July – 4 August, 2017. MF and RF appreciate support for participation from the UN Office of Outer Space Affairs, Vienna, Austria and Boston College, Boston, MA.
Reference
1) Davis, K. (1990). Ionospheric Radio. Peter Peregrinus Ltd. London, UK.
2) Filić, M, Filjar, R, and Ruotsalainen, L. (2016). An SDR-based Study of Multi-GNSS Positioning Performance During Fast-developing Space Weather Storm. TransNav, 10, 395- 400. doi: 10.12716/1001.10.03.03. Available at: http://bit.ly/2fxAvph, accessed on 29th November, 2017.
3) IGS. (2017). International GNSS Service archive and products. Available at: http://www.igs.org, accessed on 29th November, 2017.
4) Mendillo, M. (2006), Storms in the ionosphere: Patterns and processes for total electron content. Rev Geophys, 44, RG4001, doi:10.1029/2005RG000193.
5) Petrovski, I G, and Tsujii, T. (2012). Digital Satellite Navigation and Geophysics: A Practical Guide with GNSS Signal Simulator and Receiver Laboratory. Cambridge University Press. Cambridge, UK
6) Sanz Subirana, J et al. (2013). GNSS Data Processing – Vol. I: Fundamentals and Algorithms. European Space Agency (ESA). Nordwijk, The Netherlands. Available at: http://bit.ly/1QV4KAL, accessed on 29th November, 2017.
7) Takasu, T. (2013). RTKLIB: An Open Source Program Package for GNSS Positioning. Software and documentation available at: http://www.rtklib.com, accessed on 29th November, 2017.
8) R-project team. (2017). The R project for Statistical Computing (software, documentation, and books). Available at: https://www.r-project. org, accessed on: 15 July, 2017.










 (No Ratings Yet)
(No Ratings Yet)






Leave your response!