| Disaster Management | |
Navigating indoors in 3D geospatial for disaster risk reduction and response
The paper highlights the need assessment and explores the role of 3D geospatial information and modeling regarding the indoor structure and navigational routes as disaster risk reduction and response strategy |
 |
|
 |
|
 |
|
A trend of densely populated highrise residential, commercial and office buildings are transforming the urban environments in increasingly complex infrastructure development areas (KPMG, 2012). Catastrophic situations as earthquakes, fires or terrorist attacks require quick access to buildings as well as rapid evacuation. This demands preplanning of access and escape routes (Ronchi, 2015). Devising a good response strategy under different disaster scenarios need to have information about the design of the building, possible escape routes, potential obstacles (such as furniture and dynamic blockades) as well as connecting indoor-outdoor. Scenarios can be generated using 3D spatial information with non-spatial attributes for resource optimization so as to save human and economic losses. The paper assesses the need for 3D geoinformation and explores approaches for 3D indoor modeling, navigation, evacuation and visualization which can be utilized in disaster risk reduction (DRR) and response strategy for a high-rise and complex building structure. For this purpose, several papers have been reviewed.
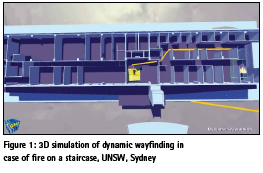
Rapid evacuation can be accomplished with proper pre-planning in complex infrastructures considering predefined escape plans, escape routes and response of occupants (Ronchi et al., 2013). In case of a fire incident, responders need strategies to evacuate, building access and reaching source of fire using floor plans of indoor structure (OSHA, 2001). A response route is drawn for this purpose. In addition, they need assessment of reaching time to the desired place in the building based on distance, the location of obstacles, type of structure, and other materials expected inside. Locational information of these obstacles, escape routes, storage points, etc. is required in multi-floor large buildings in addition to the floor connecting stairs, inside and outside connecting corridors or lobbies. 3D spatial information is much more effective than traditional 2D mode to understand the indoor structural formation and navigating optimally (Gangraker et al., 2015). Figure 1 illustrates an imaginary use of 3D indoor information in an emergency situation.
Obtaining 3D indoor spatial information has been researched upon in various publications, and many 3D approaches have been devised. However, the 3D models need additional enrichments and links to many other data sets to be able to support disaster risk reduction and response effectively.
Disaster risk reduction and response requires information-based preparation and mitigation strategies to deal with an emergency event. Spatial information enables capturing the emergency situation better, consider various parameters and create a better common operational picture (Diehl et al., 2005). The existing paper or digital based 2D format spatial information has limited interactive capability.
With the advancements in spatial science-based GIS and Remote Sensing technologies, 3D information is getting generated on the much wider scale.
It is primarily used for visualization purpose and as a virtual reality training tool (Berlo et al., 2005). In recent times, it has emerged as analytical tool with realistic views and application simulations such as plume modelling, forest fire simulation or landslides (Wang et al., 2017; Kemeç et al., 2010).
With rapid urbanization, complex three-dimensional structures are developing on a large scale as underground networks, basements and multi-floor high rise buildings.
Based on literature study, the following requirements have been identified:
1. 3D reconstruction of indoor spaces should be done in a quick and feasible manner (Holenstein et al., 2011; Staats et al., 2017).
2. The reconstruction approaches should be able to collect information about obstacles.
3. The 3D models should be semantically enriched containing information about properties of building components and spaces of importance for DRR (Diakité et al., 2016 a).
4. Accurate information on space connectivity and accessibility should be recorded in the models, emphasizing potential openings in case of disaster.
5. The information should be organized in a way that allows flexible derivation of navigation networks, which enables user-tailored navigation, considering their profile as well as tasks
6. Application development should be supported for different platforms using the models.
7. The navigation should consider different situations that might occur during emergencies, e.g. smoke, lack of electricity, water, not using elevators
8. Constraints to wayfinding need to be dealt for route planning (Stoffel et al., 2007).
9. The developed interfaces should be simple and expressive.
10. The developed applications should have a self-contained variant, being able to work with or without internet access.
Therefore, 3D indoor geospatial information is gaining importance for an efficient and quick response. This justifies the need to develop methods which can provide reliable, accurate, context wise semantics-based 3D indoor data for reconstruction and navigation purposes on a mass scale.
The reviewed approaches are analyzed using parameters in the context of indoor risk and disaster management. These parameters are implementation, connection to outdoor, spatial model and network, constraints handling.
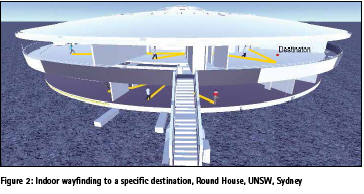
Indoor space capturing can be efficiently performed byTerrestrial laser scanners and handheld devices. Mobile Laser Scanner (MLS) devices are more efficient than static terrestrial scanners since they can provide a continuous scan of the environment following a trajectory (Holenstein et al., 2011; Staats et al., 2017). Sensors such as Kinect V2 from Microsoft are popular among the RGB-D cameras (Figure 2). These sensors provide low-cost and accurate depth images after proper calibration and thus can be used for 3D reconstruction (Jiao et al., 2017). Use of micro unmanned aerial vehicles (UAVs) for 3D mapping of the facility have been suggested for quick data collection. Using 3D axis parallel box (APB) approach which in plural sense include maps closed to basic set operations of union, intersection and set difference, etc. (Leth et al., 2017). Another example is Google-Tango Development Kit, which enables indoor reconstruction combining different sensors (Gülch, 2016).
Regarding quick processing of point clouds, Octree data structuring has emerged as a common method. This allows efficient structuring of space, in which case a large empty space can be represented by a large node high in the octree (Rodenberg et al., 2016).
Reconstruction of semantic and geometric components include volume shifting and loop closure, the coarse-to-fine iterative closest point (ICP) algorithm, the SIFT odometry, inertial measurement unit (IMU) odometry combined to robustly and precisely estimate pose and least square adjustment algorithm (Huai et al., 2015, Jamali et al., 2015). Contextual relationships as well as local features based planar patches can be input for the classification algorithms (Xiong et al., 2010).
Artificial or image-based textures can enrich an 3D environment. Stock objects from 3D warehouses (e.g., Google 3D Warehouse) can also be used for this purpose. Further enhancement can be done by importing such models into 3D gaming engines for instance Unity3D (Gangraker et al., 2015). Another way is to use a vocal interface with contextual information about the surrounding environment (Ran et al., 2004). In case of incomplete knowledge of space, further observations can be made from actions performed, using derived knowledge to achieve the goal (Raubal, 1999).
Automatic reconstruction of 3D interiors from raw point clouds as a grammar-based approach enables building modelling with rooms access through hallways on horizontal, continuous floors. Seamless transition from LOD3 to LOD4 building models is possible by embedding such grammar in an iterative automatic learning process. After the initial grammar, higherlevel grammar can be applied to predict realistic geometries to building parts where only sparse observation data are available (Becker et al., 2015). Too much reliability on empirical analysis in case of absence of large datasets needs to be tackled with human interpretation of results based on experience and expert judgement.
Different approaches have been explored for information collection about potential obstacles in indoor environment from existing plans. This can allow the automatic prediction and generation of building floor plans serving as the basis of building a 3D indoor model using architectural regularities and probability distributions for doors location prediction (Dehbi et al., 2017).
Point clouds can also be utilized to detect potential obstacles (Vilariño et al., 2016). Such models could be developed as interactive and contextsensitive by utilizing the sensor on the mobile devices which include builtin accelerometer, compass and camera capabilities (Low et al., 2015).
All such methods differ in one way or another. The, laser scanner sensors use separate technologies and designs for 3D model generation along with different prices, sizes, quality, measurement capabilities and additional requirements of usage. Besides accuracy and suitability for emergencies, very often access to devices and transporting them to the place to be modeled are points of importance (Sirmacek et al., 2016).
The 3D data collection and reconstruction aspects could be highly useful for DRR and disaster response activities. Enriching the data with semantics attributes, geometric attributes and textures can generate more realistic environment in 3D for DRR and response planning. Detection and prediction of potential obstacles could enhance these disaster management efforts.
In case of indoor navigation, the path of a person is not limited the way it is for a car in case of outdoor navigation (Gotlib et al., 2013). In case of emergencies, two types of navigation can be considered: 1) from outside to indoor for rescuers and responders and 2) from indoor to outdoor to aid people in need. Depending on the type of user the applications differ.
Important building information within the spatial context of the rescuer can be provided on a mobile device for rescuers (Rueppel et al., 2009). In case of response process initiated, indoor and outdoor drones can perform monitoring both inside and outside the building, sending all visual data to the server (Maravall et al., 2017). This visual data can be utilized by rescuers. Indoor navigation for evacuees requires a guidance system which could be based on navigation algorithm devised using information on hazardous areas, emergency spreading, congestion areas (Weeraddana et al., 2013).
Another specific application of indoor navigation research is for routing purposes to fulfil the transportation necessities of each production asset (Scholz et al., 2017). Similarly, a user can be a normal person with no problems with eyesight while another user could be a visually impaired person or a person in an environment with bad visibility (e.g. smoke). Thus, indoor navigation aid has to be developed accordingly taking care of the specific requirements of a user (Ran et al., 2004).
Accessibility for different people should be defined using a hysical 3D environment. For instance, an accessibility map for people with disabilities using wheelchairs and first responders caring specialized equipment can vary compared to ordinary people. Hence, in order to calculate the accessibility map aspects related to max slope that a person can climb along with step height and person’s radius and height should be taken into account (Barrera et al., 2015).
Navigation of people and wayfinding in indoor environments is affected from the fact that different navigation areas can be used by a person such as open spaces, corridors, doors, stairs, elevators and escalators (Bukowski et al., 2016). Apart from that other people having the same trajectory can influence the navigation process (Braun et al., 2003). Therefore, considering the impact of the number of people residing a building during a different period of a day should be considered for path calculation (Tashakkori et al., 2016).
Thus, two navigation types are identified: outdoor/indoor navigation for first responders and indoor/outdoor navigation for evacuees. Regarding first responders, real-time information about the current situation and the best route should be provided. When it comes to evacuees, aspects such as people abilities and their performance using different egress components should be taken into account to provide the best navigation for them.
Evacuation is one of the most critical activities during emergencies. People have to be lead outside the building to a specific safe place in an appropriate period. Usually, these estimations are made in advance during the risk preparedness phase and are validated with the help of simulation models.
One of the approaches for simulating an evacuation is Multiple Ant Colony Optimization (MACO) algorithm coupled with heuristic information, two-colony rules and local search for generating optimal indoor room spatial patterns (Yang et al., 2017). In case of a disaster event, Ant Colony Based algorithm can find the required number of first responders and their potential individual routes to search points of interest in a building which will minimize the overall time spent by all rescuers inside the disaster area (Tashakkori et al., 2016). Based on a swarm algorithm, swarm creatures can search for the requested target and, once found, return to the user whilst creating a path (Yoon et al., 2006).
In order to track evacuees’ movements, data from RFID devices and smartphones can be used (Ortakci et al., 2015). Also, surveillance videos can be processed to detect their movements (Zhou et al., 2016). Another approach suggests using the concept of decentralized evacuation targeting single evacuees in a dynamically changing environment with risk-aware guidance on their smartphones. Information depositories, collecting the knowledge acquired by the smartphones of evacuees passing by, at strategic locations convey it to other passing-by evacuees (Zhao et al., 2017). 3D localization approaches can be based on the use of Bluetooth (BT) radio technology and implemented using Java and J2ME (Cruz et al., 2011).
An important aspect of evacuation is guidance. Landmarks fetched in the memory of evacuees or responders can help them to prepare a mental map of the optimal route for escape or evacuation. Algorithms used can calculate path linking the minimal amount of actions to the landmarks (Vaiene et al., 2016). An optimization technique considering timespace- based risk is proposed taking into account the spatial location of evacuees within a building to minimize the risk (Han et al., 2007). One interesting approach used is of navigation graphs with weights, done with affordances based on ontology (Scholz et al., 2017).
Implementation of the constraint models require to take into account visibility and generating route descriptions (Stoffel et al., 2007). 3D engines have some capabilities to handle collision avoidance during route planning. For example, the physics component of the Unity Engine (Gangraker et al., 2015). Mosaics can be used to map local areas to ease user navigation through streets and hallways, by providing a wider field of view (FOV) and the inclusion of more decisive features. Besides, audio support, visual support can be considered as signage, visualtext, and visual-icons for augmenting environments (Molina et al., 2012).
3D information is essential to determine required safe egress time (RSET) performing evacuation simulations to understand evacuees’ performance as well as to accurately calculate available safe egress time (ASET) carrying out fire simulations (Bukowski et al., 2016).
Several important aspects have been identified in this section presenting the components that should be considered for effective evacuation and DRR. Thus, different algorithms based on ant colony and swarm optimization can be utilized to find the best option among the available set of solutions integrating various aspects such as risk, dangerous locations and people preferences. Localization and dissemination of information to evacuees is another important aspect which needs careful investigation for DRR. Different methods such as audio support, the use of text and arrow based signage can be utilized to reduce the risk during an evacuation. 3D information can be also used to determine RSET and ASET times to provide safe evacuation for evacuees though a building.
In many cases indoor location is more appropriate to be given as a relative location, such as ‘next to’, ‘at from of’, or ‘close to’, and approach which is not used for outdoor navigation (Sithole et al., 2016). Indoor Navigation models such as IndoorLocationGML can support establishing such locations and linking them to outdoor notations for seamless indoor-outdoor expression of location (Zhu et al., 2016). Using mobile phone base station’s signal patterns could be an approach to identify the users’ location (Wang et al., 2016). Many libraries are currently available to develop personalised applications. 3D gaming engines make readily available a number of utilities in a package form as a software development kit (SDK). Thus, various SDKs are compatible with mobile devices providing core components such as rendering engine, media engine, physics engine, scripting functionality, networking capability and even Artificial Intelligence (AI). For emergency situations, the role of renderer component is critical due to its interaction with user and allows having 2D or 3D display of the surrounding environment (Gangraker et al., 2015).
One of the promising gaming engines is Unity3D, which enables development of a Graphic User Interface (GUI) which can reflect specific needs or tasks. Also, objects that are within a visible field of view can be rendered, and thus increase the performance of a graphical processing unit (Lovreglio et al., 2018). Another suitable 3D gaming engines is 3DState (Rahman et al., 2007). Research has been conducted connecting indoor modeling process, route finding and visualization using CityEngine (Kim et al., 2015). A multilayer system with application, web-service and database can be developed to provide services of localization, navigation and visualization (Xu et al., 2013). However, such internet-based approaches should be used with care in case of emergency response as internet connection might fail.
Navigable areas can be automatically extracted and presented over the physical 3D space enabling a person to intelligently move through an available walkable environment, which option is also available within Unity3D. Visualization of different navigable layers within a building impacting the speed of people as well as the calculation of the shortest path, using A* algorithm considering layers’ costs and even dynamic obstacles, can be undertaken at runtime (Barrera et al., 2015).
In case of emergency, instant visualization on a mobile device with proper information of static obstacles and direction could be useful for responders as well as victims. Direction presented in a visual manner can prevent the disoriented victims, blinded due to invisibility, from getting trapped even when they know the building interiors. For this purpose, Mobile applications have been developed for smartphones to provide the user with such visual support (Ortakci et al., 2014). Static obstacle positions can also be pre-defined (Mutlu et al., 2012). Indoor architecture is represented via corner based feature points obtained through a monocular camera (Celik et al., 2008). Smartphones are readily available which have a geomagnetic sensor which can be used for designing a geomagnetic positioning indoor navigation system based on Android platform (Jiaxing et al., 2017).
Research topics have also explored solutions for navigation with a different perspective for evaluating the ease of wayfinding, considering 3D interactions between wayfinding behaviors and signage location, visibility, legibility, noticeability, and continuity to detect ‘disorientation spots’ such as forks (Maruyama et al., 2017). External information can be used (e.g., signage) as a wayfinding aid (Vilar et al., 2012) during emergency route planning. A digital sign system with designated patterns can be readily detected and identified with a digital camera and machine-vision system (Tjan et al., 2005). These digital signages can flash updated emergency messages for evacuees or responders.
Discussion and recommendations
Disaster management is an integral part of planning and development of urban areas in developed countries. The similar issue face high-rise multi-story complex infrastructure environment in metro cities of fast developing economies like India and China, it is going to be an important component of infrastructure development plans. With densely populated areas having complex structures, there is always a possibility of emergency situations like fires or earthquake or flash floods, endangering human lives and infrastructure. Disaster management for urban environments with complex structures requires to focus on 3D indoor applications development as risk reduction and response strategies.
As part of DRR and response strategy, the most critical aspect for indoor applications is the generation and maintenance of 3D information. Generating three-dimensional spatial data with a reliable method on a mass scale at rapid speed is essential to widespread the awareness to use such data among planners. 3D information serves as the basis of modeling for 3D data structuring, visualization and guidance, 3D indoor construction, seamless indooroutdoor connection and evacuation. This kind of information requires technical accessories and skills available in the form of software & hardware platforms. Our review has shown that such methods exist, but information is unstructured and can be used only for observation. 3D data collection is becoming quick and cheap, but the 3D reconstruction methods are still at experimental stage.
The study clearly shows that terrestrial and mobile scanners are mostly used to generate semantically rich 3D reconstructions. To fulfill geometric measurements and CAD models with high level semantics in the form of key structural components such as walls, floors and ceilings along with their spatial relationships, much research is needed. Standard representations such as BIM and CityGML LOD4 could be very helpful to facilitate exchange and re-use of 3D models, and they have to be maintained and up-to-date. Such accurate geometric and high level semantic information can allow planners to develop very realistic mitigation measures as part of the DRR efforts. Responders will also get very good virtual environments to train in the preparation phase or to create an accurate common operational picture during the emergency.
Information about accessibility of spaces (based on use of spaces) is of critical importance and should be further investigated (Alattas et al., 2017). With 3D information of indoor space, limitless benefits can be achieved such as modelling and calculation of more accurate network routes, precise identification of navigable spaces for users with different capabilities and preferences, better understanding of daily activities of residents, performing realistic RSET and ASET calculations, risk reduction of evacuees considering spatial location of dangerous locations and rapid distribution of first responders for better coverage within a building. 3D reconstruction approaches should also consider mechanical, electrical and plumbing (MEP) designs more and more as integral part of building structure. This will allow to generate better response measures and to consider alternate routes of evacuations with more knowledge of building structural intricacies.
For the purpose of navigation, standardisation approaches to create Geometric Network Model have been gaining interest. In this respect IndoorGML can be mentioned as one promising concept, allowing to create navigation models on the basis of duality of space and indication about connectivity. This concept is further extended to link different space models, which can be organized in a Multilayered Space- Event Model (MLSEM). This provides a flexible framework supporting all indoor navigation tasks. By dividing indoor environment into subspaces and automatically deriving a network, a more refined navigation paths can be computed that considers the task of the navigated agent (user or robot).
These developments must be further intensified and specialized for DRR considering the storage space and processing power required to subdivide the space of interest and tasks to be executed. In case of response to a disaster event, the urgency of the nature of the event, develops requirement to process the data at high speeds considering the dynamics of changing the environment.
Indoor navigation is not only about defining the space models but also developing routes which should be cost effective in terms of time, distance, safety, security or physical effort. Avoiding obstacles is an integral part of it. Indoor navigation aid has to take into context the specific requirements of a user. For rescuers, mobile devices such as smartphones and drones can play an important role by providing inputs about the building structure and displaying the potential routes and obstacles while on the move. Thus, indoor accessibility and evacuation maps have to be extended, considering the physical criteria such as corridor slope or stairs to be climbed and user context such as disable victims and rescuers carrying specialized equipment, need to be developed as a part of DRR efforts.
Any DRR and response strategy has the safe evacuation of victims trapped inside a structure as the first and foremost target to be achieved. This critical activity requires estimates to be made in advance as part of DRR efforts. Reviewed literature showed that most studied approach is Ant Colony Optimization (MACO) algorithm. Importance of mental maps defining an optimal route for escape or evacuation are mentioned in the reviewed literature. Safe evacuation is directly linked to time as a crucial factor. 3D information of indoor environment can enable accurate calculations of RSET and ASET and facilitate modeling of evacuation process. Audio & visual support as announcements, signage, visual-text, and visual-icons can be considered for augmenting environments.
Another critical issue is seamless outdoor and indoor connection, which are important for both evacuation planning and individual guidance. Current approaches of linking outdoor and outdoor networks via anchor points are trivial but insufficient for DRR. The existing outdoor networks fail to provide accurate paths appropriate for human movements. In this respect, an extension of the indoor approaches for navigation could be an option for outdoor.
Using realistic visuals and appropriate guidance on the basis of 3D rendering engines can enhance the perception and comfort of the user. Visual guidance should be combined with sound interfaces. For example, smoke, engulfing the building, or electricity failure can be a reason for reduced visibility, which will require a vocal interface with contextual information about the surrounding environment.
With readily available mobile technologies, the rapid development of mobile applications is observed, but these applications should be extended to serve emergency situations. In case of disaster scenarios, such mobile applications should allow users to plan the escape routes on their own as well as to connect with responders in a 3D visual way for further guidance.
References
Alattas, A., Zlatanova, S., Oosterom, P.V., Chatzinikolaou, P.E., Lemmen, C., and Li, K-J., 2017. Supporting Indoor Navigation Using Access Rights to Spaces Based on Combined Use of IndoorGML and LADM Models, International Journal of Geoinformation, vol. 6 (12), 384
Barrera, R., Kyaw, A.S., Peters, C. and Swe T. N., 2015. Unity AI Game Programming. Packt Publishing Ltd..
Berlo, M.V., Rijk, R.V., and Buiël, E., 2005. A PC-based Virtual Environment for training team desicion-making in highrisk situations, in: Proceedings of the 2nd International ISCRAM Conference, Brussels, Belgium, pp. 195-201
Becker, S., Peter, M., Fritsch, D., 2015. Grammar Supported 3D Indoor Reconstruction from Point Clouds for “As-Built” BIM. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. II-3/W4.
Braun, A., Musse, S.R., Oliveira, L.P.L. de, and Bodmann, B.E.J., 2003. Modeling individual behaviors in crowd simulation, Computer Animation and Social Agents, 16th International Conference on. IEEE, pp. 143–148.
Bukowski, R. W., and Tubbs, J. S., 2016. Egress Concepts and Design Approaches BT – SFPE Handbook of Fire Protection Engineering, Springer, New York, pp. 2012–2046.
Celik, K., Chung, S., and Somani, A., 2008. Mono-Vision Corner SLAM for Indoor Navigation, IEEE International Conference on Electro/Information Technology
Cruz, O., Ramos, E., and Ramírez, M., 2011. 3D indoor location and navigation system based on Bluetooth, CONIELECOMP 2011, San Andres Cholula, 2011, pp. 271-277. doi: 10.1109/ CONIELECOMP.2011.5749373
Diakité, A. A., and Zlatanova, S., 2016a. Extraction of the 3D free space from building models for indoor navigation, ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, IV-2/W1, 241-248, doi:10.5194/ isprs-annals-IV-2-W1-241-2016
Dehbi, S.L., Dehbi, Y., and Pliumer, L., 2017. Estimation of 3D Indoor Models with Constraint Propagation and Stochastic Reasoning in the Absence of Indoor Measurements. International Journal of Geoinformation, 6, 90; doi:10.3390/ijgi6030090
Diehl, S., and Heide J.V. d., 2005. Geo Information Breaks through sector shink, Geo-information for disaster management, Springer Verlag, Heidelberg, pp. 85-108
Gangraker, Z., 2015. 3D indoor modelling using a gaming-engine. Originally presented at AfricaGEO 2014. PositionIT; http:// www.ee.co.za/article/3d-indoor-modellingusing- gaming-engine.html (12 July 2018).
Gotlib, D., and Gnat, M., 2013. Spatial Database Modelling for Indoor Navigation Systems; Reports on Geodesy and Geoinformatics. Pages 49-63; doi:10.2478/rgg-2013-0012; Versita
Gülch, E., 2016. Investigations on Google Tango Development Kit for Personal Indoor Mapping, AGILE 2016, Helsinki,
Han, L. D., Yuan, F., and Urbanik, T., 2007. What is an effective evacuation operation?, Journal of urban planning and development. American Society of Civil Engineers, 133(1), pp. 3–8.
Huai, J., Zhang, Y., and Yilmaz, A., 2015. Real-Time Large Scale 3D Reconstruction By Fusing Kinect and IMU Data. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences. II-3/5, France Holenstein, C., Zlot, R., and Bosse, M., 2011. Watertight surface reconstruction of caves from 3d laser data. 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3830–3837.
Jamali, A., Anton, F., Rahman, A. A., Boguslawski P. and Christopher M. G., 2015. 3D Indoor Building Environment Reconstruction Using Calibration of Rangefinder Data. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences. II-2/W2, Malaysia
Jiao, J., Yuan, L., Tang, W., Deng, Z., and Wu, Q., 2017. A Post-Rectification Approach of Depth Images of Kinect v2 for 3D Reconstruction of Indoor Scenes. International Journal of Geoinformation, doi:10.3390/ijgi6110349.
Jiaxing, L., Congshi, J., and Zhongcai, S., 2017. The Design and Implementation of Indoor Localization System using Magnetic Field Based on Smartphone, International Archives of the
Photogrammetry, Remote Sensing and Spatial Information Sciences, doi: 10.5194/ isprs-archives-XLII-2-W7-379-2017.
Kemec, S., Zlatanova, S., and Duzgun, H. S., 2010. A Framework for Defining a 3D Model in Support of Risk Management, Geographic Information and Cartography for Risk and Crisis Management – Towards Better Solutions, Springer, 2010, pp. 69-82
Kim, K. and Wilson, J.P., 2015. Planning and visualising 3D routes for indoor and outdoor spaces using CityEngine, Journal of Spatial Science, Taylor & Francis, 60(1), pp. 179–193.
KPMG, 2012. Cities Infrastructure: a report on sustainability, KPMG International
Leth, J.J., Cour-Harbo, A., Schioler, H., Larsen, J., and Totu, L., 2017. Easy 3D Mapping for Indoor Navigation of Micro UAVs (Poster). 15th International Conference on Informatics in Control, Automation and Robotics. ICINCO.
Low, C.G., and Lee, Y., 2015. Interactive Virtual Indoor Navigation System using Visual Recognition and Pedestrian Dead Reckoning Techniques. International Journal of Software Engineering and Its Applications, 9(8), 15-24. doi:http:// dx.doi.org/10.14257/ijseia.2015.9.8.02
Lovreglio, R., Gonzalez, V., Feng, Z., Amor, R., Spearpoint, M., Thomas, J., Trotter, M., Sacks, R., 2018. Prototyping Virtual Reality Serious Games for Building Earthquake Preparedness: The Auckland City Hospital Case Study’, arXiv preprint arXiv:1802.09119 [cs.AI].
Maruyama, T., Kanoi, S., Date, H., and Tada, M., 2017. Simulation-Based Evaluation of Ease of Wayfinding Using Digital Human and As-Is Environment Models. International Journal of Geo- Information, 6. doi:10.3390/ijgi6090267
Maravall, D., Lope, J,d., Fuentes, J.P., 2017. Navigation and Self- Semantic Location of Drones in Indoor Environments by Combining the Visual Bug Algorithm and Entropy- Based Vision; Front Neurorobot, 11:46. doi: 10.3389/fnbot.2017.00046.
Molina, E., Zhu, Z., and Tian, Y., 2012. Visual Nouns for Indoor/ Outdoor Navigation. Computers Helping People with Special Needs. ICCHP 2012. Lecture Notes in Computer Science, vol 7383. Springer, Berlin, Heidelberg; https://doi. org/10.1007/978-3-642-31534-3_6
Mutlu, L., and Uyar, E., 2012. Indoor Navigation and Guidance of an Autonomous Robot Vehicle with Static Obstacle Avoidance and Optimal Path Finding Algorithm. 13th IFAC Symposium on Control in Transportation Systems. Sofia, Bulgaria: The International Federation of Automation Control.
Spatial Information Sciences, Volume IV-2/W4, 2017, pp. 393 – 400, China.
Stoffel, E.P., Lorenz, B., Ohlbach, H.J., 2007. Towards a Semantic Spatial Model for Pedestrian Indoor Navigation. Advances in Conceptual Modeling – Foundations and Applications. Lecture Notes in Computer Science, vol 4802. Springer, Berlin, Heidelberg.
Tashakkori, H., Rajabifard, A., Kalantari, M., 2016. Facilitating the 3D Indoor Search and Rescue Problem: An Overview of the Problem and an Ant Colony Solution Approach. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences. IV-2/W1. Greece
Tjan, B.S., Beckmann, P.J., Roy, R., Giudice, N., and Legge, G. E., 2005. Digital Sign System for Indoor Wayfinding for the Visually Impaired. Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05)
Vaiene, P., Wulf, A., Maeyer, P. 2016. Indoor landmark-based path-finding utilizing the expanded connectivity. Environment and Planning B: Planning and Design 0(0). doi: 10.1177/0265813516670901
Vilar, E., Rebelo, F. and Norlega, P. 2012. Indoor Human Wayfinding Performance Using Vertical and Horizontal Signage in Virtual Reality. Human Factors and Ergonomics in Manufacturing & Service Industries, 00 (0)(c 2012), pp. 1-15. DOI: 10.1002/hfm.20503
Vilariño, L.D., Boguslawski, P., Khoshelham, K., Lorenzo, H., and Mahdjoubi, 2016. Indoor Navigation from Point Clouds: 3D Modelling and Obstacle Detection. XLI-B4. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLI-B4, 2016 doi:10.5194/ isprsarchives-XLI-B4-275-2016
Wang, S-H, Wang, W-C, Wang, K-C, Shih, S-Y, 2015. Applying building information modeling to support fire safety management. Automation in Constraction. Vol. 18, pp. 158 – 167
Wang, W., Chang, Q., Li, Q., Shi, Z., and Chen, W., 2016. Indoor-Outdoor Detection Using a Smart Phone Sensor. Sensors, doi:10.3390/s16101563 Wang, Z., Zlatanova S., and Oosterom, P.V., 2017. Path Planning for First Responders in the Presence of Moving Obstacles with Uncertain Boundaries, IEEE Transactions on Intelligent Transportation Systems, Vol. 18 (8), pp. 2163 – 2173
Weeraddana, D., Gunathillake, A., and Gayan, S., 2013. Sensor Network Based Emergency Response and Navigation Support Architecture; World Academy of Science, Engineering and Technology; International Journal of Electronics and Communication Engineering; Vol:7, No:7.
Xiong, X., Huber, D., 2010. Using Context to Create Semantic 3D Models of Indoor Environments, Proceedings of the British Machine Vision Conference, pages 45.1-45.11. BMVA Press, doi:10.5244/C.24.45.
Xu, W., Kruminaite, M., Onrust, B., Liu, H., Xiong, Q., Zlatanova, S., 2013. A 3D model based indoor navigation system for Hubei provincial museum. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. XL-4/W4.
Yang, L., Xu, S., Zhu, A., and Chi, T., 2017. A Multiple Ant Colony Optimization Algorithm for Indoor Room Optimal Spatial Allocation. International Journal of Geo-Information, 6. doi:10.3390/ijgi6060161
Yoon, S. J., Maher, M. L., 2006. Wayfinding Swarm Creatures Finding Paths Indoors. Moving Ideas into Practice. Cooperative Research Centre for Construction Innovation; ISBN 1-7410712-8-3
Zhao, H., Winter, S. and Tomko, M., 2017. Integrating Decentralized Indoor Evacuation with Information Depositories in the Field. Int. J. Geo- Inf. doi: 10.3390/ijgi6070213
Zhou, Y., Zlatanova, S., Wang, Z., Zhang, Y., and Liu, L., 2016. Moving Human Path Tracking Based on Video Surveillance in 3D Indoor Scenarios. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, III-4, Czech Republic; doi:10.5194/isprsannals-III-4-97-2016
Zhu, Q., Li, Y., Xiong, Q., Zlatanova, S., Ding, Y., Zhang, Y. and Zhou, Y., 2016. Indoor Multi-Dimensional Location GML and Its Application for Ubiquitous Indoor Location Services;. International Journal of GeoInformation, 5, 220. doi:10.3390/ijgi5120220











 (3 votes, average: 4.67 out of 5)
(3 votes, average: 4.67 out of 5)




Leave your response!