| Mapping | |
Modern acquisition technology of spatial data
UAV technology and the technology of laser scanning of the terrain and buildings are becoming more dominant techniques of mass gathering of spatial information |
 |
|
 |
|
|
|
 |
|
During the last ten years, the possibilities for data acquisition in geodesy have been rapidly improved. The devices have become cheaper, smaller and more accurate and, on the other hand, they are capable of gathering a large number of data within a very short time interval. Also, mobile platforms have been developed as carriers for different devices such as LIDAR (Light Detection and Ranging) platforms, platforms for cameras, etc. Unmanned aerial vehicles (UAV) are of special interest. Their primary use concerns the threedimensional terrain mapping and they are applied in various domains, among which is geodesy. These devices are light, mobile, completely automated, providing access to even the most unavailable terrains. The satellite high-resolution frames have demonstrated immense potential in forming the frames to national maps (charts) of all kinds and purposes. In addition to geometric data offered by the digital terrain model for the necessities of determining spatial form of urban planning, a very important role belongs to the orthophoto map as a geocoded digital raster photograph, on the basis of which different space forms can be identified. The satellite high-resolution frames have demonstrated a high potential in forming the frames to planning and designing of various kinds and purposes. What is attractive to many potential users is just the meter resolution which, practically, makes it possible to extract the objects appearing in the majority of digital cartographic products. The technology of preparation of digital topographic layouts in vector and raster format is in expansion. Great number of satellites with sensors for remote sensing provides a resolution better than 1 meter. Also, laser scanning technology is often used in urban design and space planning project.
Technology of laser scanning of terrain and buildings
For the purpose of solving practical problems in many branches of engineering industry, there is a need for measuring and modeling of measured data as per real display of spatial surroundings. By development of laser scanning technology the conditions for application of 3D measuring of points of very high density have been met in a way that modeling of subject survey can be carried out by using this data. The necessity for highly detailed 3D terrain and building coordinates occurs in different engineering disciplines, such as [3]:
• Quality control, supervision and comparison of construction with plans, especially on complex construction sites;
• Virtual planning, analysis of spatial relations between buildings themselves, but also between a building and surroundings (complex buildings);
• Digital archiving of infrastructure (tunnels, bridges and road network) in order to provide the basis for efficient management; and
• Control of different deformations on construction sites (landslides, strains, faults on facilities) and surveying of entire construction sites with not only the previously determined selected points.
Detailed survey of culturally significant buildings, monuments, churches and towers, with very accurate documentation of their condition (interior and exterior), is required to repair them in case of collapse or destruction of any kind.
Laser scanning LIDAR
Laser scanning of the terrain from the air (LIDAR) today represents one of the most contemporary technologies used in surveying and preparation of topographic plans and maps for different purposes. Laser scanning data can be combined with satellite images in order to make 3D terrain model and create a photorealistic view of the terrain (Figure 1).
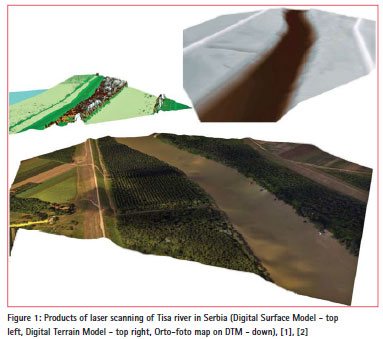
The technology is based on gathering three different sets of data. The position of a sensor is determined by the use of Global Positioning System (GPS) using a phase measuring in the regime of relative kinematics, and the orientation is determined by use of Inertial Measurement Unit (IMU). A laser scanner is the last component. The laser sends an infrared beam to the earth and it reflects to the sensor. Time lapsed from emission to reception of signal with knowledge of sensor and orientation position, enables for the 3D coordinates on Earth to be calculated [1], [2].
During flight speed of approximately 250 km/h and altitude of approximately 1,000 meters with standard characteristics of a sensor (130,000 emissions / second), the data on position of points on the ground with density of up to 100 dots/m² have been gathered. Usual relative accuracy of a model with calculated omission of GPS and inertial system amounts to 5-7 cm. Absolute error is always better than 15 cm and it can be significantly reduced by use of control points on the ground. Almost all modern LIDAR systems, next to GPS, IMU and laser scanner, also integrate RGB/NIR (Red – Green- Blue, Near Infra Red) cameras of high resolution which enable the making of quality orthophoto plans of resolution of up to 2 cm (depending on the height of flight above sea level). Survey with LIDAR is carried out while moving and the system can be mounted to a vehicle in the aim of a scanning corridor, such as roads or similar line facilities or to an aircraft for scanning the corridor from the air. LIDAR has a very simple principle of measuring. The scanner emits high frequency impulses and it reflects from the surface to the instrument. The mirror inside laser transmitter moves by rotating perpendicular to the flight direction which enables the measuring in wide belt. Time elapsed from the emission to the return of each impulse and angle of divergence from the vertical axes of the instrument are used for determining relative position of each measured point. Data from laser scanning are combined with scanner position and orientation, in order to obtain three dimensional coordinate of laser print on the surface of the terrain [3].
After the processing of GPS vector from base stations to each measured sensor position, orientation and determining relative position on the ground in regard to the sensor, the following data are obtained:
• The cloud of points of first and last echo
• DSM first and last echo
• RGB and NIR recording
Technique of mobile laser scanning
The implementation of the most recent laser scanning technique combined with the high-precision navigation system, yields a system for 3D scanning of roads, buildings and trees from moving vehicles. The device utilizes several laser scanners where each of them performs up to 10,000 measurements per second with a scanning speed of at most 100 acts of scanning per second. In this system, different scanners located at different places of the car platform can be utilized.
In Figure 2, the technique of mobile laser scanning by using the ‘MDL Dynascan’ system, model 250, is presented.

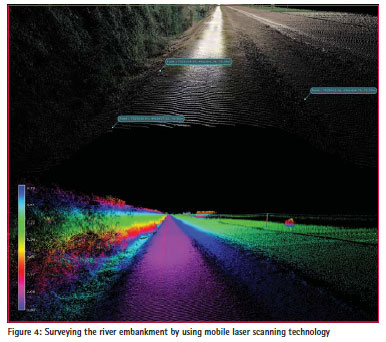
The system is specially designed for a rapid 3D mapping of motorways, roads, runways, railways, infrastructure objects, etc. The data can be registered in a normal drive speed. The survey of urban environments over a relatively short time is also possible. Such a system makes it possible to register every detail along the scanning corridor, including road verges, traffic signs, surface lines, object facades and everything entering the view field of the scanner. Combining the data scanned by laser with the video and photographs make it possible to produce a very precise 3D model [4]. Such a system makes it possible to scan the corridor very quickly (even 60km/h – recommended not higher than 30 km/h) with high precision satisfying various necessities. One of them would also be the canal scanning for the purposes of reconstructing and designing (Damaturu, The State of Yobe, Nigeria) [5].
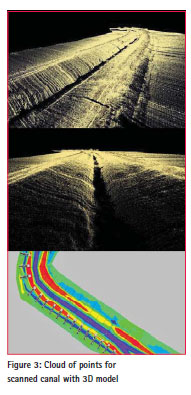
LIDAR scanning, even with a speed of 350,000 points per second, can scan a large number of points with georeference coordinates. Such a set of points is not suitable to any application in the process of designing, consequently, a data treatment is unavoidable. To generate 3D models with all technical characteristics necessary to all kinds of space analyses and new designing is possible by means of a numerico-graphical data treatment, by using a specialised software. One day of scanning requires about 7 days for data treatment in order to obtain the corresponding formats of graphical presentations suitable to standard designing in space planning, urbanism and other engineering branches [5].By a computer treatment of the collected cloud of points, it is possible to generate a 3D model and from it the characteristic profiles (Figure 3 and Figure 4). By comparing them to the profiles generated from the existing topographic documentation or to the profiles from the same measurement after a time interval, it is possible to quantify the changes and determine the degree of terrain degradation.
UAV technology in regional and urban planning
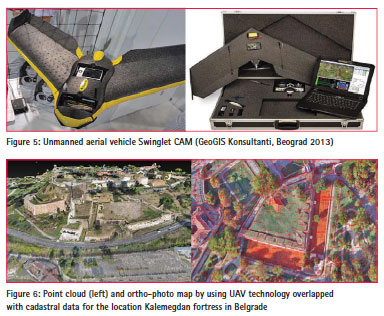
Unmanned aerial vehicles (UAV) are of special interest. Their primary use concerns the three-dimensional terrain mapping and they are applied in various domains, among which is geodesy. These devices are light, mobile, completely automated, providing access to even most unavailable terrains. They are simple for use so that, in addition to the mapping, they are also used for various purposes of concept and other kinds of regional and urban planning, and design. It is also important to mention its application in engineering geodesy. Here we explain the procedure of creating a digital terrain model and cadastre-topographic map with the minimal application of the conventional measuring methods; we also present a short specification of the eBee SenseFly (Figure 5). The SenseFly UAV System is exceptionally light, and with a mass of 0.7 kg, it is one of the lightest UAV systems available in the market. The flexible polystyrene construction and the propeller mounted in the rear part of the construction are designed to provide the security of both the system itself and people on the terrain.
The device takes off, flies and lands fully automatically. The vehicle gathers photographs from the air, its range is 1-10 sq km for a single flight and it reaches a precision up to 5 cm (Figure 6). The maximum duration of its flight is 45 minutes which makes it possible to cover even 10 sq km in a single flight. Its 16MP camera produces photographs from the air with a resolution of 3cm per pixel. The images can be used in creating maps and digital elevation models with a precision attaining 5 cm. The reverse-buoyancy technology and innovative terrain sensor make possible landing even in limited areas. SenseFly has built an intuitive software ‘eMotion 2’ with which one can plan, simulate, track and control the device trajectory, both before the flight and during it. The artificial intelligence built in SenseFly autopilot analyses the data from the inertial measuring unit and GPS incessantly, and takes care about all aspects of the flight mission. The Ebee autopilot saves all data and gathered images of the flight trajectory. These data can be taken by use of a USB. They are directly compatible with the Postflight Terra 3D-EB software. This software offers the possibility of automatic treatment of georeferenced orthomosaics and digital elevation models (DEM) to an accuracy of 5 cm (relative accuracy). The ground control points can be used for the purpose of improving accuracy. The main problem arising in the treatment of a large number of points (Point Cloud) is the classification. By classifying the terrain points, one can group the points within classes so that it becomes possible to reach a very precise digital terrain model (DTM). In the case of UAV everything is visible, but the problem is due to roofs and roof constructions. On the basis of visible roof constructions, one can obtain information concerning the position of the principal axial points of an object. Where the scanning is performed by using the UAV system only, the characteristic object points must be scanned by applying one of the classical methods or by applying mobile laser scanning; whereas in the case of objects for which the details are scanned by using both systems, it is possible to determine the characteristic points by combining the obtained data.
Conclusion
The application of devices for gathering large bodies of data has become essential in recent times. The technological development of these devices is very rapid. The accuracy of measurements has improved, which is followed by an intense software development concerning data treatment. The conventional manner of the presentation of spatial data in 2D form enriched with information at sea level of certain points (isohypses) is slowly abandoned, and has been replaced by the modern concept of 3D presentation of altitude display of terrain and buildings. Here, in regard to recent experiences, more geometrical and visual information on terrain configuration and artificial buildings have been obtained by manipulating 3D model in suitable software surroundings. For that purpose, UAV technology and the technology of laser scanning of the terrain and buildings are becoming more dominant techniques of mass gathering of spatial information in regard to recent techniques, with great saving in time and money. Modern datacollecting methods can to a high extent quicken and improve the formation quality for 3D topographic frames which are necessary, because the quality of urban planning carried out depends on the quality of geodetic maps. Modern technological procedures of gathering and processing of spatial data enable 3D display of spatial forms (terrains and buildings) in full-color regime. Practically all most-recent geo-information systems have an integrated module for 3D visualization that enables a 3D positioning of the buildings in relative and absolute model, i.e., coordinate system. Many of them have some additional possibilities such as the extraction of building height, flight simulation over the digital terrain model, etc. Engineers of different professions connected with spatial planning shall consider this 3D analysis as extremely useful for regional and urban planning, designing of transport and telecommunications, environment protection, etc.
References
[1] GeoGIS Consultants, Belgrade (2012): Project of surveying river embankment on the Danube by using mobile laser scanning technology.
[2] GeoGIS Conslultants, Belgrade (2011): The project of laser scanning and preparation of orthophoto maps of Tisa river.
[3] Ninkov,T., Bulatovie, V., Sušie, Z., Vasie, D. (2010): Application of laser scanning technology for civil engineering projects in Serbia, , FIG International Congress 2010, Sydney, Australia, 11-16 April 2010.
[4] Sušie, Z., Ninkov,T., Bulatovie, V., Vasie, D. (2011): Use of IR cameras in industrial applications, Iinternational scientific conference and XXIV meeting of serbian surveyors: Professional practice and education in geodesy and related fields, Proceedings, Kladovo, 2011.
[5] Vasie, D., Ninkov,T., Bulatovie, V., Sušie, Z. (2011): Development of 3D topographic layouts for the Design of rain sewerage for the city of Damatur in Nigeria, Iinternational scientific conference and XXIV meeting of serbian surveyors: Professional practice and education in geodesy and related fields, Proceedings, Kladovo, 2011.
The paper was presented at FIG Congress 2014,Kuala Lumpur, Malaysia, 16 – 21 June 2014












 (7 votes, average: 3.57 out of 5)
(7 votes, average: 3.57 out of 5)




Leave your response!