| Mapping | |
Innovations in boundary mapping
One of the objectives of the study was to develop a method for mapping customary land parcels using a UAV. A method was developed and tested in Namibia |
 |
|
 |
|
 |
|
 |
|
This study investigates the potential of using Unmanned Aerial Vehicles (UAV) in surveying and mapping customary land parcel boundaries. In Namibia, new laws demand for the boundaries of individual and collective customary lands to be adjudicated, mapped and recorded. Over two thirds of Namibia’s population still live on unregistered customary land (Kasita, 2011). Thus, it has been the obligation of government to come up with developmental initiatives aimed at developing communal areas. One such initiative was the introduction of the Communal Land Reform Act No.5 of 2002 aimed at eliminating tenure insecurity in the communal areas.
Many studies relating to the use of UAV in land administration are emerging. These studies generally claim that UAV is now an alternative or supplement to conventional mapping techniques. Proven benefits with regards to costs, efficiency, accuracy and flexibility have been revealed, especially in urban areas where the majority of testing has been performed. However, the argument is yet to be empirically proven in more rural contexts, particularly those with customary lands. This study, therefore seeks to address this gap by testing the applicability of UAV technology in capturing images for surveying and mapping customary land rights.
Based on a joint publication by the FIG and the World Bank, “75% of the world’s population do not have access to formal systems to register and safeguard their land rights and, therefore, there is an urgent need to build affordable and sustainable systems to identify the way land is occupied and used”(FIG & WORLD BANK, 2014). It is believed that the advancement in emerging technology such as small and affordable UAV systems and geoinformation techniques offer an innovative means to capturing and producing cheaper and faster spatial data for use in land administration projects(Kelm, 2014). Such advancement in technology can help land administration agencies and governments to secure land rights for their people.
As Williamson, Enemark, Wallace, & Rajabifard, (2010) point out, emerging land administration systems do not require formal land surveying and mapping practices. The communal land registration system in Namibia is one such system. This means that there is no need for a professional land surveyor, as any technical employee with basic training can undertake the mapping exercise. In addition, the demarcation of physical boundaries is not required by law, but in order to reduce boundary conflicts and to have a graphical representation of the land parcel in the cadastre, a means to spatially identify land parcels and interests in land is required.
Studies in Namibia have revealed that aerial photos are the most efficient means to map customary land boundaries. However, since the beginning of the land registration program in 2005, aerial photos have not been available country wide. Until early 2014, the use of orthophotos has been limited to the northern part of the country due to high acquisition costs and prioritization as the major reasons behind the lack of or delayed acquisition of the aerial images. In addition, due to the amount of time it takes for the suppliers to prepare the images, they are out-dated at the time of delivery; this means that the images do not represent the current situation on the ground.
There has been on-going debate about the credibility of the mapping techniques used on communal land. Land surveyors
in Namibia have not been in support of the use of hand held GPS and aerial photos, citing that the methods are not up to the prescribed standards set out in the law in terms of accuracy. This situation has threatened the envisaged merger of the Namibia Communal Administration System (NCLAS) with the Deeds system in the future.
This paper will present a general background of UAVs and their use in cadastral surveying. This will be followed by a discussion on the developed methodology for mapping customary land parcels with UAVs, which includes a look into the legal implications and the results of the pilot study.
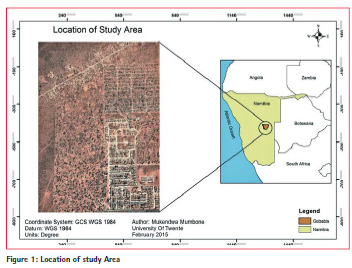
Study area
The study took place in the “Freedom Square” informal settlement situated on the outskirts of Gobabis Namibia. The settlement has approximately 3188 inhabitants in 808 households, the housing structures are made of corrugated iron sheets, plastic, grass and wood. The area was chosen because it gives a broad overview of the diverse spatial and social structures in different communal parts of the country. Furthermore, the area is close to the main town of Gobabis. Gobabis is the regional capital of the Omaheke region, located 200km east of the capital Windhoek, along the Trans Kalahari highway towards Botswana (22°00′S 19°30′E). The Omaheke region is one of the 14 regions in Namibia; it lies on the eastern border of Namibia. The close proximity of the area would accord the researcher more time to sensitize communities prior to flight, to process the data and return to communities to complete the mapping exercise. In the end it took less time and effort to get much higher yield in terms of number of households and variety in development status and density. Figure 1 shows the location of the study area.
Background on UAV
Unmanned Aerial vehicles were initially designed for military operations, however recent advancement in technology have seen smaller, more lightweight platforms being used in civilian applications such as Forestry and Agriculture (Engel & Teichert, 2008), Heritage Management(Chiabrando, Nex, Piatti, & Rinaudo, 2011), Mapping and Surveying(Nex & Remondino, 2013). The term UAV photogrammetry has emerged (Eisenbeiss, 2009), which in simple terms is the use of UAV platforms for photogrammetric measurements. When used as mapping platforms, the platforms are equipped with photogrammetric measurement systems such as still or video cameras(Eisenbeiss, 2011). Bailey, (2012) defined UAV as “a powered aircraft system that is remotely piloted, either manually or semi-autonomously by remote control or autonomously through the use of an on-board computer navigation system or a ground control station that sends commands wirelessly to the aircraft”. Apart from the name UAV, various other names such as; Drone, UVS (Unmanned Vehicle System) and UAS (Unmanned Aircraft System) are commonly used. As argued by Eisenbei, (2009), UAS is commonly understood to refer to the whole system; the UA(Unmanned Aircraft) and the ground control station( GCs).
There are two distinct categories of UAVs, Rotary-wing and fixed-wing UAV systems. Rotary-wing is based on rotors and blades, and is said to be well suited for surveying small areas, whereas the fixed-wing’s design is based on that of an aircraft and is suited for surveying larger areas (Tahar & Anuar, 2012). Furthermore, the multiple rotor design of the rotarywing gives it the ability to fly steadily, hover over an area and capture images (Eisenbeiss & Sauerbier, 2011). According to Tahar & Ahmad, (2013), this gives the rotary-wing the ability to be more stable and thus capture images easily.
Both types may be used in land administration projects, depending on the scope of the project and extent of the area to be mapped. For example, mapping an entire village of up to 100ha would require a fixed wing, whereas mapping selected homesteads in that village would require the use of a rotary-wing UAV. In a UAV test in Switzerland, Manyoky et al. (2011) used the Octocopter Falcon 8 rotary wing UAV to capture images and demonstrated that UAV could reach the required accuracy for cadastral surveying.
In a study by Jing (2011), who investigated the application of UAVs in adjudicating land rights in a city in China, it was concluded that UAV technology can benefit adjudication in rural areas where accuracy standards are not high. Meanwhile Barnes et al. (2013) developed a methodology that entails the steps involved in using UAV for cadastral surveying and mapping projects. This was done on a case study basis in Albania. A similar workflow can be seen in (Eisenbeiss, 2011). In Albania (Kelm, 2014), UAVs were tested in three major areas; Rural mapping applications, Urban mapping applications and Periurban applications. In the rural area, it was tested whether the technology can deliver high resolution orthophotos that can be used for cadastral surveying. An orthophoto with 2cm accuracy was produced. The Albanian tests concluded that UAV technology is indeed fit-for purpose because it includes elements of flexibility, participation, inclusivity, affordability, reliability and upgradeability.
Current process for mapping customary land parcels
To support the graphical part of the Namibia Communal Land Administration System (NCLAS), parcel boundaries need to be established. The most convenient and affordable means is the use of Orthophoto. As pointed out in a report by the Millennium Challenge Account (MCA, 2010), orthophotos were acquired in 2008, and are available digitally. They are geo-referenced 10×10 km tiles with a ground resolution of 1 meter and an accuracy of 2-3 meters.
This process begins with the retrieval of tiles that cover the area to be mapped. Tiles are printed and stored as hard copy. The tiles are carried along in the field where parcel owners identify their parcel boundaries and mark them with a fine pointed marker pen. Sometimes this is done house to house, or in cases where a prior arrangement had been done, a community meeting is arranged. Back in the office, the tiles are scanned and the parcels vectorised. The problem with this approach is that the orthophtos are out-dated. The orthophotos are over 8 years old, and do not depict developments that have taken place over the eight years. In addition, the printing and scanning of orthophotos causes them to lose accuracy.
Alternatively, the use of GPS is employed. This system includes simple hand-held GPS devices with an accuracy of about 5-10 meters, and cost between N$ 500 – N$ 2000(€50-200) per unit. A GPS survey can map up to an average of 10 land parcels a day depending on the size.
The process begins with the preparation of the GPS equipment. The GPS receivers are set up to WGS84 datum, and further set up to collect waypoints in Decimal Degrees. Parcels are then marked by walking to each parcel corner and marking the way point at that specific corner. The way point numbers for each parcel are recorded on a paper (data collection sheet) as back up. After completion, the way points are downloaded on to a computer as shapefile (.shp). Making reference to the data collection sheet, the waypoints are connected to each other creating polygons. Each polygon is given the owner’s name and a unique parcel identifier (UPI).
Mapping customary land parcels with UAV in Namibia
Legal implications Despite the laws demanding for customary land parcels to be mapped and adjudicated in Namibia, surveying methods are not prescribed. This study uncovered that the Communal Land Reform Act #5 of 2002 does not specify the type of survey instruments or the minimum accuracy standards that should be considered in mapping customary land parcels.
The land survey act 33 of 1993 specifies classes of surveys, and accuracy standards, but nothing specific is said about communal land. Class A for urban areas, Class B for surveys in townships, and Class C for “all other surveys not included in class A and B”. It is also stipulated under the same regulation that the Surveyor General may determine the standard of accuracy of any survey operation that is not specified in the regulations. There is however no documentary evidence that the Surveyor General has ever determined any surveying standards for communal lands.
There researcher therefore, found this to be vague and misleading as there is no reference of communal land falling under any of the mentioned classes. This vagueness in the law leaves land administrators with the task of being proactive and constantly research and employ new methods and techniques that are fit for purpose. In the case of UAVS, research has shown that UAV use is heavily regulated in most countries. In the case of Namibia, this study reveals that there are regulations put in place for using the UAVs. The regulations do not prevent the use of UAVs for mapping applications or any other applications.
The Namibia civil aviation authority (Aviation act 74 of 1962) compels any person who would like operate a “remotely piloted aircraft”, which in this study is understood as a UAV, to seek prior approval from the relevant authorities. UAVs may not be operated within a published controlled zone, air traffic zone or air traffic area. The maximum flight height cited is 45.7m/ 150 feet, and this should not be closer than 5 nautical miles to an airport.
These finding brought the researcher to the conclusion that, since there are no tools and techniques prescribed by law, any survey and mapping method can be employed, given it has been proven to work. Therefore, these findings warrant for the testing of UAVs in mapping customary land parcels in Namibia.
The pilot test
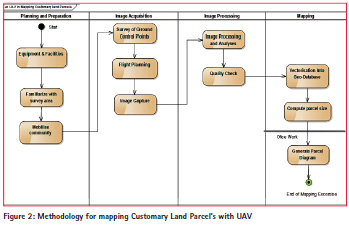
A methodology was developed in order to integrate UAVs in mapping customary land parcels. The methodology consists of four main sections; Planning and Preparation, Image Acquisition, Image processing and Mapping, as seen in figure 2. Different stages in each section are presented and discussed. To test the methodology, a pilot test was undertaken in the “Epako North” informal areas in Gobabis Namibia.
Planning and preparation
This stage entails the planning and preparation of the project. The area to be mapped is studied; the equipment and facilities are prepared. According to (Barnes, Volkmann, Sherko, & Kelm, 2014)The following technical aspects are to be considered:
(i) The type of UAV platform- this is determined by the size of the area to be mapped, the larger the area is the more the need to use a Fixed wing UAV
(ii) GSD -This is an important consideration in a project; GSD depends on the required resolution. The higher the resolution, the smaller the GSD values. These require low flying height and slower speeds. For ultra-high resolution needs, the use of rotary wing UAVs is recommended.
(iii) Nature of Terrain- This affects the choice of UAV platform to use. Fixedwing UAVs may require an open flat surfaced area for launch and landing, whereas rotary wing is easier to launch in a dense forest area or built up area.
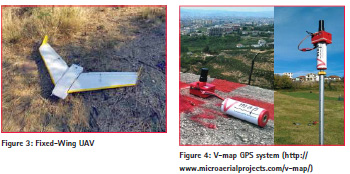
(iv) Regulatory limitations- it is important to consider the legal regulations before flying. For this study, a locally manufactured fixed-wing UAV (figure 3) was used to capture the Imagery for the study area “Epako North” which covers an area of 160 ha/ 1.6km2. The drone used has a payload of 650g and was fitted with a 16mp camera from Sony.
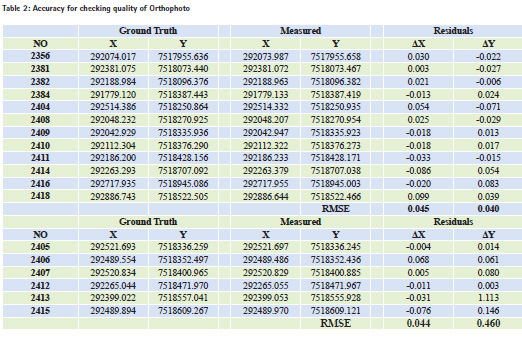
Image acquisition
Image acquisition involves the acquisition of ground control points, mission planning and the launching of the flight. The acquisition of ground control points is dependent on whether or not geo-referencing of the end product (orthophoto) is required. In case there is a need to fulfill specific accuracy standards, geo-referencing is required, and hence ground control points need to be collected. Ground control points are usually surveyed with the use of high accuracy differential GNSS equipment, and placing markers systematically across the area.
The markers are usually bright colored features that are easily visible in an image. Once the ground control points have been surveyed, a flight mission is then developed. This can be done using open source flight planning software which is freely available on the web. In mission planning, the desired area is marked on an image from Google Earth; together with other parameters, this guides the UAV in its mission.
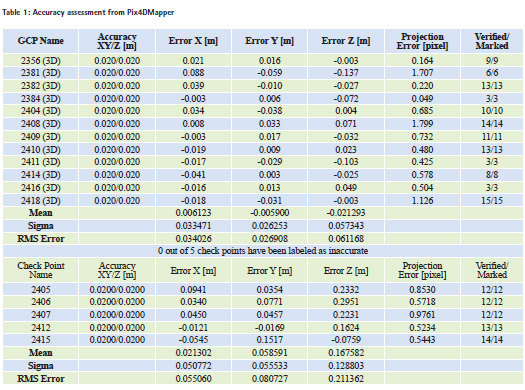
For this study, a total of 23 ground control points where placed systematically across the area, using V-maps differential GPS system. The V-Map system is a pair of light weight (130g) dual frequency receivers small and light enough to be carried by small drones (Figure 4). The units are configured for event marking and are primarily designed to determine camera exposure positions by means of postprocessing L1 and L2 phase observations. To locate a known reference point, coordinates were sourced from a land surveyor who had previously surveyed the area. These coordinates were loaded into a GPS navigating device with the aim of locating at least one of the points.
This activity however proved futile as the markers had either been removed or buried deep in the sand. To remedy this situation, a local reference point was established and a local reference station was installed and positioned through GPS (WGS 84 Datum). It is important to note that because of the remaining, unknown offset with the mapping frame, the coordinates of the GCPs also have this unknown bias. Manholes, tires and white paper plates stuck in the ground were used as markers.
The excess amount of ground control points were a guarantee that in the end of the flight, some GCPS would still be visible besides being removed by children or blown away by the wind. Otherwise, only 17 of them were used; 12 control points for geo-referencing and 5 check points for validation. The coordinates where established using post–processing techniques because the GPS system was not in Real Time Kinetic (RTK). Whether in practice such a large number of ground control points is necessary is subject to further research. In this study we wanted to ensure highest available accuracy.
In order to be able to later assign the right coordinates to the correct ground control point, each time a ground control point was established, its positions was fixed by placing and leveling the rover over it for 60 seconds, during which a photograph was taken at 30 seconds on each point with a camera whose time is synchronized with that of the GPS. Using the open source planning software called “Mission Planner” a flight plan was designed to cover the study area with an average ground sampling distance (GSD) of 45mm. The flight plan was uploaded to the UAV system, which was then launched to capture 16MP images with the following specifications: 150m flight height and an average air speed of 14m/s, a lateral overlap of 70%, and forward overlap of 80%.
Image processing & quality check
This stage involves the orthophoto generation and quality check. The generation of the orthophoto is achieved through various photogrammetric operations. Firstly, camera calibration is performed, which is followed by the processing of the images to create 3D point clouds. The point cloud is then geo-located using ground control points that have been identified in the image. The point cloud is then used to generate a Digital Surface Model (DSM). The geo-referenced images are combined to form an Orthomosaic. There is a number of image processing software available. Once this is done, it is good practice to perform a quality check of the orthophoto in terms of accuracy.
In this study, the image processing was carried out using professional software called “Pix4DMapper” from Pix4D. The interior orientation parameters of the camera (focal length, position of the principal point, and lens distortion parameters) were estimated through a self-calibration process, i.e. during bundle block adjustment. An alternative pre-calibration was not possible in the field and experience shows that selfcalibration delivers sufficient accuracy for most applications. After bundle block adjustment, photogrammetric results such as a Digital Surface Model and an Ortho-mosaic were generated.
The next stage in the methodology is the quality check. This was the assessment of the photogrammetric result in terms of accuracy. During initial processing by pix4dmapper, an accuracy assessment report for the bundle adjustment was generated. The result shows an average ground sampling distance (GSD) of 4.81cm. Table 1 shows the results of the accuracy assessment using object coordinate residuals at both ground control and check points based on Root Mean Square error (RMSE). It should be noted that the accuracy considered is that of the check points (bottom), because check points are independent from bundle adjustment. The error in X (east) is 5 cm whereas in Y (north) is 8 cm. From these results, it can be concluded that UAV techniques that are used in this study gives very high accuracy on 2D mapping. In the same table, it can be seen that there is a 21cm error in height. However, considering the fact that the maps used for cadastral purposes require just X and Y coordinates, Z coordinates and their accuracy do not play a significant role on mapping and on 2D cadastre in general. Thus, for this study height was not considered.
To evaluate the quality of the orthophoto, further analyses were done. GCPs were uploaded into Arcmap, where the base layer was the generated orthophoto. A manual approach was applied where the researcher visually checked if the uploaded coordinates of the ground control points fits with their marker on the orthophoto. In cases where there were significant differences (mostly in cm), the researcher then manually retrieved the coordinates from the center of the mark which is visually represented in the orthophoto.
An assumption was made to use the GCPs collected in the field by GPS as the reference value to use in comparison with the coordinates retrieved from the orthophoto in arcmap. The Root Mean Square Error (RMSE) of the coordinates was then computed in Microsoft Excel (Table 2).
It can be seen in table 2 that the accuracy of the orthophoto is 4cm in X and 5 cm in Y, which is not significantly different from the Pix4d generated accuracy (Table 1). We can also observe that the residual delta Y in point 2413 is significantly different to other points. This error could have been caused by a wrong measurement or it is an outlier. A conclusion can therefore be drawn that the intermediate steps (image matching, terrain modeling, and orthophoto projection) did not significantly reduce the accuracy of the final orthophoto; hence we can assume that point on ground, measured within this orthophoto will have a positional accuracy with a standard deviation of 4 to 5 cm.
Mapping
The final part in the methodology is mapping, which includes vectorisation, computing of the parcel boundary and the generation of the parcel diagram. Vectorisation refers to the process of converting raster data into vector data. In this case, land parcel boundaries are traced on the image (raster) and stored into a geodatabase as vector polygons. The parcel size is computed in Arcmap and displayed on the parcel diagram. The parcel diagram is the final output of this exercise.
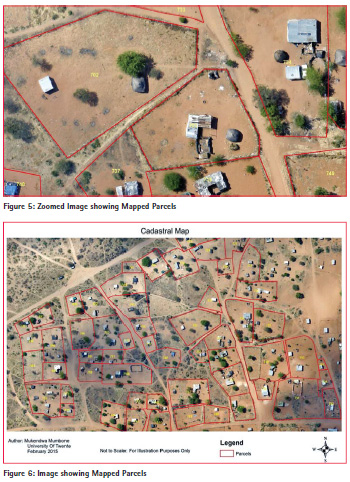
This activity took place after the image processing and quality checks were completed. A meeting was held with a small number of people from the community in the study area. During the meeting, a laptop was used to view the orthophoto digitally in Arc Map, and each of the people took turns to identify their parcel boundaries on the image. The researcher then vectorised the parcels and immediately entered the parcel information in the attribute table. The vectorised parcels can be seen in figure 5 and 6. Each parcel was given a unique parcel identifier (UPI). The UPI is a unique id associated to each parcel of land and linked to the name of the parcel owner in the database.
A line is simply drawn around the holder’s land parcel guided by natural features such rows of trees, hedges and rocks, or manmade features such as fences, foot paths and roads. Since the guiding features were clearly visible on the images, it can be concluded that in addition to good spatial accuracy, the orthophoto also delivers good visual quality. Thus, it can be argued that UAV generated orthophoto is well suited for mapping customary land parcels.
Barnes, Volkmann, & Barthel, (2013) advocate for the use of unmanned aerial vehicle in the “In-situ” delivery of high resolution aerial photos, as well as promotion of citizen participation in adjudication. This exercise saw a number of people, including the elderly participate in the mapping process. Participation by all land owners and their neighbors prevents or minimizes boundary disputes because all concerned parties are involved in the mapping process. This affirms that UAV-mapping encourages participation.
Conclusion
This study concludes that the UAV enabled mapping approach enables capture of high resolution images out of which good quality orthophotos can easily be generated. Due to the high resolution nature and timeliness, such images can easily be used for mapping customary land rights boundaries; this can be done in a fast and relatively cheap fashion of vectorising parcels straight on-screen, without having to print the orthophoto. This exercise also proved that the visual quality of the images is adequate for boundary mapping as the guiding features such as fences and hedges were clearly visible.
This study further revealed that the accuracy derived from photogrammetric operations is good enough to fit the purpose of mapping customary land parcels. The accuracy assessment was done in order to test the degree of error produced by the proposed UAV method. It was revealed that accuracy derived from this method surpasses those derived from hand held GPS receivers and the current orthophotos. The results show an accuracy of 4-5centimeters, which is by far higher than that of current methods (5-10meters).
With these accuracy results, this study recommends for further studies into the potential merger of the communal cadaster into the country’s main deeds system. It is further recommended that the use of UAV be considered in other similar applications in Namibia i.e; farm assessments and monitoring activities, building of 3D cadastre in urban areas, and informal settlement planning and upgrading. It is also important to study whether these approaches can be transferred to other countries with specific land administration needs.
There are many other ways to verify the accuracy of an orthophoto. However, due to time limitations such avenues were not explored in this study. Should there be a need to verify these results, this study recommends that other evaluations methods be used; for example, to perform a ground survey using RTK GNSS, and then compare with the accuracy of the vectorised features. This however depends on the quality needs of the survey as it is time consuming and may lead to extra costs.
Costs are an important consideration in land administration projects. However, costs were not in the scope of this study, but it is recommended that a comprehensive costbenefit analysis study be undertaken when considering the adoption of the technology.
Given that this study aimed to ensure highest possible accuracy, many ground control points were collected, which time was consuming. Further studies are encouraged to find out whether in practice such a large number of ground control points are necessary. There are already UAVs on the market with a dual frequency RTK receiver, see e.g the system Sirius Pro by Mavinci (http://www.mavinci. de/en/siriuspro), which means that the location of the camera for each single image can be theoretically computed by 2-4 cm accuracy. Further research should show whether such a system can be used to further reduce the number of ground control. A similar product can be seen in (ELING, 2014; Rieke & Foerster, 2011).
The study also revealed that laws are vague with regard to surveying methods and techniques on communal land. Therefore, it is recommended that laws be reviewed accordingly, and necessary amendments be made. This will prevent speculation.
Results generated in this study show that the developed methodology is functional. Thus, it is recommended that this methodology be explored further in a sanctioned communal land registration exercise by the Ministry of Lands and resettlement.
Acknowledgments
The authors would like to acknowledge Mr. Andreas Breitenstein of Namibia, who donated the aerial imagery that were used in this study.
References
Bailey, M. W. (2012). Unmanned Aerial Vehicle Path Planning and image processing For orthoimegery and Digitial Surface Model Generation.
Barnes, G., Volkmann, W., & Barthel, K. (2013). Using Unmanned Aerial Vehicles (UAVs) to Democratize Spatial Data Production: Towards Spatially Enabling Land Administration Walter. In Annual World Bank Conference on Land and Poverty. Barnes, G., Volkmann, W., Sherko, R., & Kelm, K. (2014). Drones for Peace : Part 1 of 2 Design and Testing of a UAVbased Cadastral Surveying and Mapping Methodology in Albania Paper prepared for presentation at the “ 2014 WORLD BANK CONFERENCE ON LAND AND POVERTY ” Copyright 2014 by Grenville Barnes , Walter V. In The World Bank Conference on Food and poverty (pp. 1–28). Washington D.C.
Chiabrando, F., Nex, F., Piatti, D., & Rinaudo, F. (2011). UAV and RPV systems for photogrammetric surveys in archaelogical areas: two tests in the Piedmont region (Italy). Journal of Archaeological Science, 38(3), 697– 710. doi:10.1016/j.jas.2010.10.022
Eisenbeiss, H. (2009). UAV Photogrammetry. Retrieved from http://www.igp-data.ethz. ch/berichte/blaue_berichte_pdf/105.pdf Eisenbeiss, H. (2011). The Potential of Unmanned Aerial Vehicles for Mapping, 135–145.
Eisenbeiss, H., & Sauerbier, M. (2011). Investigation of uav systems and flight modes for photogrammetric applications. The Photogrammetric Record, 26(136), 400–421. doi:10.1111/ j.1477-9730.2011.00657.x
ELING, C. (2014). Development of an RTK-GPS system for precise real-time positioning of lightweight UAVs. Proc. of: …. Retrieved from http://www.ipb. uni-bonn.de/projects/MoD/literatur/ pdf/p1-2014_Eling_Development.pdf
Engel, A., & Teichert, B. (2008). THE PHOTOGRAMMETRIC POTENTIAL OF LOW-COST UAVs IN FORESTRY AND AGRICULTURE. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences., XXXVI. Retrieved from http://www.isprs.org/proceedings/ XXXVII/congress/1_pdf/206.pdf
F I G, & WORLD BANK. (2014). Fit- For-Purpose Land Administration. (S. Enemark, Ed.) (60th ed.). Copenhagen: Internation federation Of Surveyors. Retrieved from http://www.fig.net/ pub/figpub/pub60/Figpub60.pdf
Kasita, M. (2011). Establishing Communal Land Registration in Namibia : The Process , Benefits and Challenges. In Annual World Bank Conference on Land and Poverty. Washington D.C.: World Bank. Retrieved from http:// siteresources.worldbank.org/INTIE/ Resources/475495-1302790806106/ EstablishingKasitaPres4.pdf
Kelm, K. (2014). UAVs Revolutionise Land Administration. GIM International, 28(10), 35–37. MCA. (2010). Communal Land Support ( CLS ) Sub-activity Registration Strategy & Implementation Plan. Windhoek. Retrieved from http://www.mcanamibia. org/files/files/PDFs/CLS/Registration Strategy and Implementation Plan.pdf
Nex, F., & Remondino, F. (2013). UAV for 3D mapping applications: a review. Applied Geomatics, 6(1), 1–15. doi:10.1007/s12518-013-0120-x
Rieke, M., & Foerster, T. (2011). Highprecision positioning and real-time data processing of UAV-systems. … Archives of the …. Retrieved from http:// www.int-arch-photogramm-remotesens- spatial-inf-sci.net/XXXVIII- 1-C22/119/2011/isprsarchives- XXXVIII-1-C22-119-2011.pdf
Tahar, K. N., & Ahmad, A. (2013). An Evaluation on Fixed Wing and Multi- Rotor UAV Images using Photogrammetric Image Processing, 1, 348–352.
Tahar, K. N., & Anuar, A. (2012). A simulation study on the capabilities of rotor wing unmanned aerial vehicle in aerial terrain mapping. International Journal of the Physical Sciences, 7(8). doi:10.5897/IJPS11.969
Williamson, I., Enemark, S., Wallace, J., & Rajabifard, A. (2010). Land Administration for Sustainable Development (First.). Redlands Carlifonia: Esri Press Academy.
The paper was presented at the “2015 World Bank Conference on Land and Poverty” The World Bank – Washington DC, March 23-27, 2015. Reprinted with permission












 (35 votes, average: 1.46 out of 5)
(35 votes, average: 1.46 out of 5)




Leave your response!