| GNSS | |
Design and Validation of Korean WADGNSS Reference Station Software
In this paper, the results of design, implementation and validation of
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
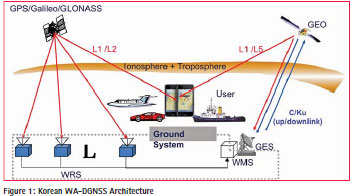
In Korea, technologies on WA-DGNSS (Wide area differential GNSS) has been being jointly developed by a consortium of universities and research organization in order to construct the system in the near future (Ho Yun et al., 2011 and Ho Yun et al., 2011). WA-DGNSS provides the correction data and integrity information via geostationary satellite to various users, i.e. aerospace, maritime, LBS etc (Fig. 1).
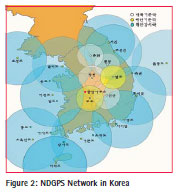
WA-DGNSS comprises Wide Area Reference Station, Master Station and User segment. Wide area reference station (WRS) receives data from the GNSS satellite, performs quality monitoring of decoded navigation data, and sends the correction data to the wide area master station (WMS) via terrestrial communication network. Wide area master station (WMS) processes the data collected from the WRS, and uplinks the calculated correction data as well as the integrity information to the geostationary satellite (GEO). GEO satellite downlinks the correction data to the users such as aerospace, marines, land applications etc for accurate and reliable positioning. In Korea, the nationwide DGPS network (Fig. 2) completed by the MOF (Ministry of Ocean and Fisheries) in Nov. 2002, has been providing the dual coverage service since then. Some of the NDGPS reference stations are being considered for the utilization as the WRS of WADGNSS system. The internet based NTRIP (Network Transport of RTCM via Internet Protocol) service has also been provided to facilitate the DGPS service since Nov. 2002. Furthermore, the so called smart phone DGPS comprising electronic chart, NTRIP server and Bluetooth is expected to be provided in realtime by using the TDMB (Terrestrial Digital Multimedia Broadcasting) network from 2015.
This paper describes the results of design, implementation and validation of WADGNSS reference station software that is being carried out by applying the Object Oriented Programming methodology to provide flexibility in software: ease of model changes (ionospheric delay model), system addition (Galileo, GLONASS in addition to GPS) etc.
WRS software design
WRS software is designed to support the following functions of the Wide Area Reference Station (Changdon Kee et al., 2011) of the WA
-DGNSS system:
– Collect Raw GPS Data
– Determine Satellite Orbits
– Determine Satellite Corrections
– Determine Satellite Integrity
– Calculate Ionospheric Delay
– Calculate Tropospheric Delay
– Calculate Pseudorange
– Estimate Pseudorange Residuals
– Monitor Data Quality
– Determine WRS Integrity
– Perform Data Verifi cation
– Transmit Raw and Preprocessed Data to WMS
– Log data
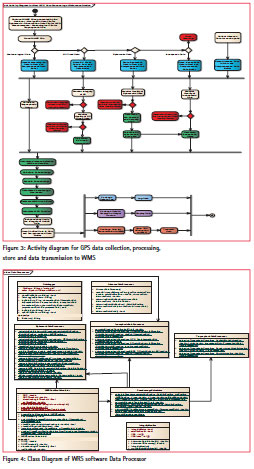
The object oriented methodology is applied for the design of the WRS software that includes Use case diagram, Architecture diagram, Activity diagram and Class diagram. Data transmission from WRS to WMS is also designed to support TCP/IP communication between WRS and WMS. Through the preliminary design phase (Uzair Ahmad et al. 2011 and Wan Sik Choi et al. 2012), UML based use case diagram is designed by identifying 18 use cases to fulfill the WRS functions. Based on the use cases designed, WRS software architecture is designed with 19 components in order to perform the designed use cases. The Activity diagrams (Fig. 3) and Class diagrams (Fig. 4) are generated as the results of the WRS software detailed design phase activities (W.S. Choi et al. 2013).
Activity diagram is designed to represent the workflows of stepwise activities and actions of WRS software. Elements of activity diagram include Start Node, Finish Node, Activity, Action, Control Flow, Decision Node and Fork/Join Nodes.
Major processing actions include calculations of ionospheric delay, tropospheric delay, SV (Space Vehicle) clock correction, pseudorange, pseudorange residuals etc.
Class diagrams are generated to represent the static structure of the WRS software, and each class is characterized by attribute, operation and relationship with other classes. WRS software class diagrams consist of three parts: WMSTCP Server class, WMSWRS Class Library, WRS Software class. WMSTCP Server class handles communication with client, and extracts data such as ephemeris data, ionospheric data, preprocessed data etc. WMSWRS Class Library handles time such as GPS time, and processes observation data set, ephemeris data packet etc. WRS software is the main class that comprises BINEX parser for realtime data processing, Data Handler data processing such as Raw Preprocessed Data Buffer, Data Processor for data processing such as Ionospheric Data Processor, Ephemeris Data Processor etc, User Interface for GUI processing, WRS_WMS Interface for data processing of data transmission to WMS. Fig 5 shows the Data Processor class diagram which is one of the class diagrams of the WRS software.
Implementation and validation
WRS software is implemented by using the OOP language C# in order to facilitate easy maintenance and extension (Wan Sik Choi et al. 2013). WRS software can be operated in post processing mode as well as in pseudo-realtime mode. BINEX (BINEX) parsing algorithm is implemented to support the pseudo realtime mode of the WRS software.
WRS software implementation includes components for initialization of WMS server, class libraries, Data Parser, Data handler, Data processor, user interface and WMS interface. Part of the WRS software implementation is shown in Fig. 5: WRS Main Screen for initialization, and preprocessed data screen of ionospheric delay etc.
Validation of the WRS software is carried out in two levels: data parsing level, modeling level. Validation of models such as ionospheric delay, pseudorange residuals etc is currently being carried. Validation of data such as BINEX data parsing has been completed as in follows. First, TEQC toolkit (TEQC) is employed to convert the BINEX data format to RINEX (RINEX) format. Then data generated from the BINEX parser module of the WRS software is compared with those from TEQC toolkit. Fig. 6 shows that the value of Square Semi Major Axis is same for both cases, i.e. values from TEQC and BINEX respectively.
Conclusions and future works
In this paper, results of design, implementation and validation of the WRS software are described. WRS software design is carried out by applying the OOP methodology in order to provide the flexibilities in software. Consequently, the software is implemented using the OOP language C#. Validation results in data level show that the data are processed correctly. Model level validation is currently being carried out. After completing the validation for both levels of data and model, extension of the WRS software will be considered for commercial level applications.

Acknowledgements
This research was a part of the project titled “WA-DGNSS Development” funded by the Ministry of Oceans and Fisheries
References
BINEX – Binary Exchange format for GPS/GNSS, UNAVCO
Changdon Kee, Ho Yun, Wan Sik Choi,”Transmission Data Specifi cation for GNSS (GPS) Wide area Reference Station”, TTAK.KO-06.0266, Dec. 2011
Ho Yun, Changdon Kee, Doyoon Kim, “Availability Performance Analysis of Korean Wide Area Differential GNSS Test Bed”, The Korea Navigation Institute, Vol 15, No 4, Aug. 2011
Ho Yun, Changdon Kee, and Doyoon Kim, “Korean Wide Area Differential Global Positioning System Development Status and Preliminary Test Results”, International Journal of Aeronautical and Space Science, Vol. 12, No. 3, 2011, pp. 225-233
RINEX: The Receiver Independent Exchange Format Version 2.10, University of Berne, Dec. 10, 2007
TEQC — The Toolkit for GPS/ GLONASS/Galileo/SBAS/ Beidou/QZSS Data, UNAVCO
Wan Sik Choi, Shah Sayed Chhattan, Joong Eup Kye, Ho Yun, Changdon Kee, “Data Processing Design of Korean WADGNSS Reference Station”, enc2012, 25-27 April 2012, Gdansk, Poland
W.S. Choi, S.S. Chhattan, J. E. Kye, W.Y. Han, H. Yun, C. Kee, “Flexible Software Design of Korean WADGNSS Reference Station”, Int J on Marine Navigation and Safety of Sea Transportation, Vol 7, No 1, Mar. 2013, pp. 75-78
Wan Sik Choi, Shah Sayed Chhattan, Woo Yong Han, Ho Yun, Changdon Kee,” Development of WA-DGNSS Reference Station Software”, Korea Institute of Navigation and Port Research Conference, Oct. 2013, pp. 390-392
Uzair Ahmad, Choi Wan Sik, Changdon Kee, “Processing of WA-DGNSS Correction Messages: A Functional Perspective”, The 18th GNSS Workshop, Phoenix Island, Jeju, Nov. 2011












 (3 votes, average: 1.67 out of 5)
(3 votes, average: 1.67 out of 5)




Leave your response!