| GNSS | |
Adaptively Steered Antenna Array and Receiver Testing
The paper discusses the GALANT adaptively steered antenna array and receiver and demonstrates the test scenarios generated with the GNSS simulator |
 |
|
 |
|
The vulnerability of GNSS to radio frequency interference and spoofing becomes more and more of concern for navigation applications which require a high level of accuracy and reliability, e.g. for safety of life applications in aviation, railway and maritime environments.
Besides pure power jamming with CW, noise or chirp signals, also cases of intentional or unintentional spoofing with wrong GNSS signals have been reported.
Hardware simulations with GNSS constellation signal generators allow investigating the impact of radio interference and spoofing on GNSS receivers in a systematic, parameterized and repeatable way. The behaviour of different receivers and receiver algorithms for detection and mitigation can be analysed in dependence on interference power, distance of spoofers and other parameters. Goal of this paper is to show examples how realistic and advanced simulation scenarios can be set up for simulation of several user antennas simultaneously.
Multi-RF NavX®-NCS
The NavX®-NCS Professional is a highend, powerful but easy to use satellite navigation testing and R&D device. It is fully capable of multi-constellation / multi-frequency simulations of Global Navigation Satellite System (GNSS) for safety-of-life, spacial and professional applications. The NavX®- NCS Professional is one of the leading solutions on the market providing all L-band frequencies for GPS, GLONASS, Galileo, BeiDou, QZSS, SBAS and beyond in one box simultaneously.

Due to its superior technology, the outstanding performance features of the NavX®-NCS Professional are beyond the capabilities of many other signal generator on the market today. Furthermore, the extra complexity and cost of using additional signal generators or intricate architectures involving several hardware boxes is avoided, while improving reliability and not compromising on functionality. It was the first GNSS simulator on the market offering both flexibility and scalability together with full multi-constellation capability, all in a single chassis.
Unlike many other GNSS simulators, the NavX®-NCS Professional gives you full control on scenario generation.
IFEN offers a Multi-RF capable version of its NavX®-NCS which provides up to four independent RF outputs (Figure 1). In addition to each individual RF output, the NavX®-NCS provides a master RF output which combines the RF signal of each of the up to four individual RF outputs.
Each individual RF output is connected to one or more Merlin modules allowing simulating of up to twelve satellites per module. Due to the flexible design of the Merlin module, each one can be configured to any of the supported L-band frequencies (see above).
As one NavX®-NCS chassis supports to carry up to nine individual Merlin modules, a couple of different Multi- RF combinations are feasible, e.g.
• 2 RF outputs with up to four modules each
• 3 RF outputs with up to three modules each
• 4 RF outputs with up to two modules each
With this configurations IFEN gives the user of the NavX®-NCS the capability to simulate different static or dynamic receivers or even one receiver with multiple antennas, covering such challenging scenarios like ground networks, formation flying or usage of beam-forming antennas.
As the user is free to assign each individual module to a dedicated simulated antenna, the user could also use all of the up to nine modules to simulate nine different carrier signals for one single antenna using the master RF output and thus simulating the complete frequency spectrum for all current available GNSS systems in one single simulation.
All modules are calibrated to garantue a carrier phase coherency of better then. Figure 13 shows the output at the RF master of two modules assigned to the same carrier but with a phase offset of . Theoretically the resulting signal should be zero because of the destructive interference. In practice a small residual signal remains because of component tolerance, small amplitude differences and other influences. Nevertheless the best cancellation can be seen at this point. The phase accuracy can now simply be estimated from the measured power level of the residual signal:
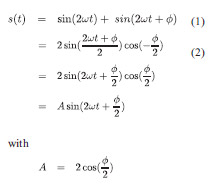
This means that the sum of two sine waves with the same frequency gives another sine wave. It has again the same frequency but a phase offset and its amplitude is changed by the factor A. The factor does affect the power level. If ø is 180o then A is 0 which means complete cancellation.
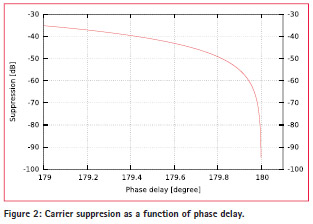
So shows the power of the resulting signal relative to the single sine wave. It can also be transformed to dB:
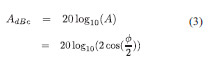
Figure 2 shows the carrier suppression as a function of carrier phase offset with a pole at 180o.
The factory calibration aligns the modules to a maximum of 0.5o misalignment. The measured suppression therefore shall be better than 41.18dBc. In practice, the residual signal is also caused by other influences, so that the actual phase alignment can be expected to be much better.
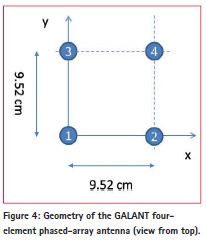
The very accurate carrier phase alignment of the different RF outputs makes the NavX®-NCS an ideal simulator to generate the GNSS signals for multiantenna systems. With four RF outputs, the received signal of a four element antenna can be configured very easily. Figure 3 show the dialog to configure a four element antenna with the geometry shown in figure 4. Please note that the antenna elements are configured in the body-fixed system with the x-axis to front and the y-axis to the right (inline with a north-east-down (NED) system when facing to north) whiles the geometry shown in figure 4 follows an east-north-up (ENU) convention).
The subsequent sections will give an overview of multi-antenna systems and will discuss some results from a measurement campaign of the German Aerospace Center (DLR) utilizing the NavX®-NCS and their GALANT fourelement multi antenna receiver.
Multi-Antenna Receivers
Multi-antenna receivers utilize an antenna array with a number of antenna elements. The signals of each antenna element are mixed down and converted from analogue to digital for baseband processing. In the baseband the signals received by the different antenna elements are multiplied with complex weighting factors and summed. The weighting factors are chosen in such a way, that the received signals from each antenna element cancel out into the direction of the interferers (nulling, CRPA) and, additionally for advanced digital beamforming, that the gain is increased into the direction of the satellites by forming of individual beams to each satellite. Because all these methods work with carrier phases, it is important that in the simulation setup the signals contain the correct carrier phases at the RF-outputs of the simulator corresponding to the user-satellite and user-interferer geometry and the position and attitude of the simulated array antenna.
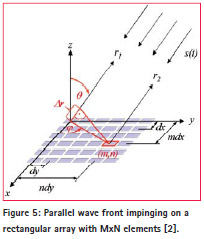
Figure 5 presents the geometry of a rectangular antenna array with MxN elements and a signal s(t) impinging from direction (Φ,θ).
The spacing of the dx, dy elements, are typically half a wavelength, but can be also less. The range difference for antenna element i relative to the reference element in the centre of the coordinate system depend on the incident direction (Φ,θ) and the position (m,n) of the element within the array [4]:
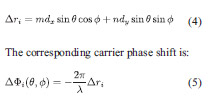
For controlled reception pattern antennas (CRPA) and adaptive beam forming applications, the differential code delays may be neglected if they are small compared to the code chip length. However, it is essential that the carrier phase differences are precisely simulated, because they contain the information about the incident direction of the signal and are the basis for the array processing in the receiver. For instance, the receiver can estimate the directions of arrival of the incident signals from these carrier phase differences.
In the following a 2×2 array antenna is considered. It can be simulated with the Multi-RF NavX®-NCS with four RF outputs, where each output corresponds to one antenna element. In the NavX®-NCS ControlCenter a user with four antennas is set up, where the position of each antenna (antenna element) is defined as an antenna position offset relative to the user position. In this approach both differential code and carrier delays due to the simulated array geometry are taken into account, because the code and carrier pseudoranges are computed by the simulator for the position of each antenna element. However, the RF hardware channels of the receiver frontend may have differential delays against each other, which may even vary with time. If the direction of the satellites and interferers shall be estimated correctly by the receiver algorithms, a calibration signal is required to measure and compensate these differential hardware delays.
For the real antenna system, a BPSK signal with zero delay for each antenna channel is generated by the array receiver and fed into the antenna calibration port [6]. For the simulation, this calibration signal must also be generated by the constellation simulator.
In a simply way a satellite in the zenith of the user antenna can be simulated, which has the same distance and delay to all antenna elements. Unfortunately, this simple solution includes some limitations to the simulated position and attitude of the user, because the user position must be at the equator (if a “real” satellite is simulated in form of a geostationary satellite) and the antenna must not be tilted.
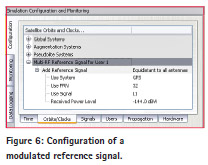
With a small customization of the NavX®- NCS ControlCenter software these limitations could be overcome. Figure 6 show how to set up the generation of a reference signal. This reference signal can either be simulated as a transmitter directly above the user position, which follows the user position and thus allows also simulations offside the equator or – which is the preferred method – simulating a zero-range signal on all RF outputs neglecting any geometry. The latter one is more or less identical to the reference/calibration signal generated by the receiver itself.
The power-level of this signal is held constant and is not affected by any propagation delay or attenuation simulated by the ControlCenter.
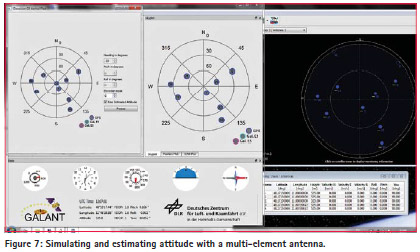
Attitude determination
According to Figure 5 phase difference measured between antenna elements is a function of the direction of arrival (DoA). Maximizing the received power of one dedicated signal thus provides an estimate of the DoA. Compared with the (known) positions of the GNSS satellites, this allows the estimation of the antenna array attitude. Figure 7 show the sky-plot of simulated satellites as seen at receiver location (simulated on the right; reconstructed by the receiver from the decoded almanac in the middle) and the DoA on the left. By comparison of the estimated DoAs of all satellites and the sky plot from the Almanac the attitude of the antenna is estimated (left). In addition the attitude angles simulated by the NavX®-NCS are given (right).
Simulation of interference
Using the NavX®-NCS it is possible to simulate some simple types of (unintentional) interference. Possible interference scenarios are
Wideband Noise
By increasing the power of a single satellite of the same or another GNSS constellation, a wideband pseudonoise signal can be generated. Using a geostationary satellite allows also simulating an interference source at low elevations and constant position. Use of power-level files does also allow generating scenarios with intermittent interference (switching on and off the interference) with switching rates up to 5 Hz.

CW or Multi-Carrier IF
By disabling the spreading code and navigation message, a continuous-wave (CW) signal can be generated. The NavX®-NCS also allows configuring a subcarrier modulation. Without spreading code (or – to be precise – with a spreading code of constant zero) the generated signal will consist of two carriers symmetrically around the original signal carrier (e.g. configuring a BOC(1,1) signal will create two CW signals at 1.57542 GHz + 1.023 MHz, thus producing “ideal” interferer for the Galileo E1 OS signal.
Depending on the number of Merlin modules per RF output, interference to signal ratios up to 80dB could be realized, limited by a dynamic range of 40dB within one module and additional 40dB range between two modules. However, the maximum power level of one individual signal is currently limited to -90dBm. If only one channel per module is used, the maximum power level of this single signal can be increased by another 18dB (e.g. by using one module solely for interference generation and another module for GNSS simulation).
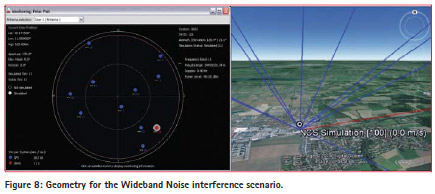
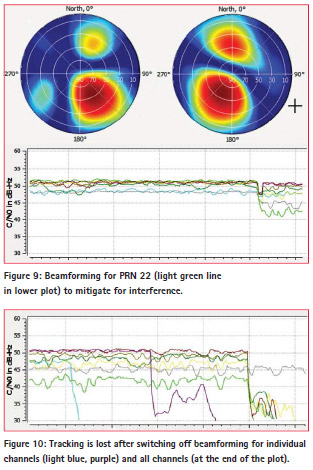
Figure 8 show the simulated geometry for a interference scenario based on wideband noise generated by a geostrationary satellite, producing -90 dBm signal power at the receiver frontend. The interference source is very near to the direction of PRN 22 with a jammer power of -90 dBm, resulting in a jammer to signal ratio of J/S = 25 dB. Figure 9 show the two-dimensional antenna pattern as a result of the beamforming before and after switching on the interferer. The mitigation algorithm tries to minimize gain into the direction of the interferer. As this also decreases gain into the direction of the intended satellite, the C/N0 drops by approx. 10dB for PRN 22, because its main beam is shifted away from the interference direction. For satellites in other directions the C/N0 decrease is less (Compare Figures. 9 and 10).
However, the receiver still keeps tracking the satellite. After switching of beamforming, the signal is lost (Figure 10).
Simulation of spoofing
The simulation of an intentional interfering signal requires twice the resources as the real-world scenario, as every “real’’ LoS-signal must also be generated for the spoofing source. A simulation of an intentional spoofer who aims to spoof a dedicated position in this context is however very similiar to the simulation of a repeater ((un-)intentional interferer) device:
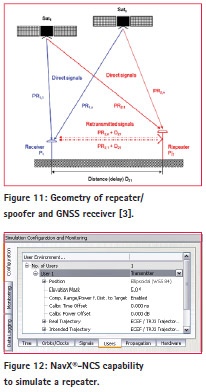
The repeater (re-) transmits the RF signal received at its receiver position. A receiver tracking this signal will generate the position of the repeater-location but will observe an additional local clock error defined by the processing time within the repeater and the travel time between repeater and receiver position. A correct simulation for a multi-antenna receiver therefore has to superpose the code- and carrier-range as observed at the repeater location (considering geometric range between the transmit antenna of the repeater and the individual antenna elements) with the code- and carrier ranges at the receiver location.
Instead of the location of the repeater however, any intended location could be used to simulate an intelligent spoofer attack (figure 11).
The NavX®-NCS allows to generate such scenarios by configuring the position of the (re-)transmitting antenna and the intended position (e.g. the position of the repeater). By calculating the difference between the real receiver position and the position of the transmitting antenna, the additional delay and free-space loss can be taken into account. The user may also configure the gain of the transmit antenna and the processing time within the repeater. Currently this setup does only support one “user” antenna to be simulated. However, this feature combined with multi-antenna support will enable the NavX®-NCS to simulate repeater or intelligent spoofer attacks in the future. To distinguish the “real” signal from the “repeated” signal, the “repeated” signal could be tagged as a multipath signal. This approach would allow to simulate the complete environment of “real’’ and “repeated’’ GNSS signals in one single NavX®-NCS.
Conclusion
The Multi-RF NavX®-NCS is valuable laboratory equipment for testing not only standard or high end single-antenna GNSS receivers but offers also additional benefit for multi-antenna GNSS receivers like the DLR GALANT controlled reception pattern antenna system.
The GNSS constellation simulator offers up to four phase-coherent RF outputs allowing the simulation of four antenna elements with two carrier frequencies each utilizing one single chassis being 19 inch wide and 2 HU high.
Simulation of intentional and unintentional interference is a possible simulation feature of the NavX®-NCS and allows receiver designers and algorithm developers to test and enhance their applications in presence of interference to identify, locate and mitigate for interference sources.
References
[1] Manuel Cuntz, Lukasz Greda, Marcos Heckler, Andriy Konovaltsev, Michael Meurer, and Lothar Kurz. “galant – architecture of a real-time safety of life receiver”. In ION GNSS 2009, Savannah, Georgia, September 2009. The Institute of Navigation.
[2] Manuel Cuntz, Andriy Konovaltsev, Marcos Heckler, Achim Hornbostel, Lothar Kurz, Götz Kappen, and Tobias Noll. Lessons learnt: The development of a robust multi-antenna gnss receiver. In ION GNSS 2010 [5].
[3] A. Hornbostel. Simulation of spoofing and interference for single antenna and multi-user/ antenna configurations. In CERGAL 2014, Juli 2014.
[4] A. Hornbostel, A. Schroth, H. Denks, and M. Holbrow. A new signal simulation tool for testing of receivers with controlled reception pattern antennas. In ION GPS ‘04, Long Beach, California, September 2004. The Institute of Navigation.
[5] The Institute of Navigation. ION GNSS – 2010, Portland, Oregon, September 2010.
[6] Andriy Konovaltsev, Manuel Cuntz, and Michael Meurer. Novel calibration of adaptive antennas. In ION GNSS 2010 [5].












 (3 votes, average: 2.33 out of 5)
(3 votes, average: 2.33 out of 5)




Leave your response!