| GNSS | |
GNSS Constellation Specific Monthly Analysis Summary: January 2026
The analysis performed in this report is solely his work and own opinion. State Program: U.S.A (G); EU (E); China (C) “Only MEO- SECM satellites”; Russia (R); Japan (J); India (I) |
 |
|
Introduction
This article continues the monthly performance analysis of the GNSS constellation. Readers are encouraged to refer to previous issues for foundational discussions and earlier results. In addition, there is a new analysis regarding Indian regional navigation systems (NAVIC and GAGAN) that will be featured regularly.
Analyzed Parameters for January 2026
(Dhital et. al, 2024) provides a brief overview of the necessity and applicability of monitoring the satellite clock and orbit parameters.
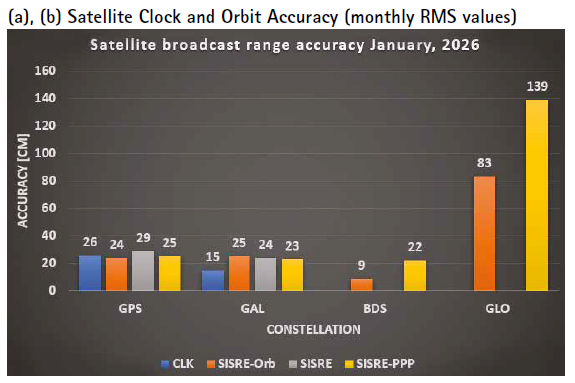
a..Satellite Broadcast Accuracy, measured in terms of Signal-In-Space Range Error (SISRE) (Montenbruck et. al, 2010).
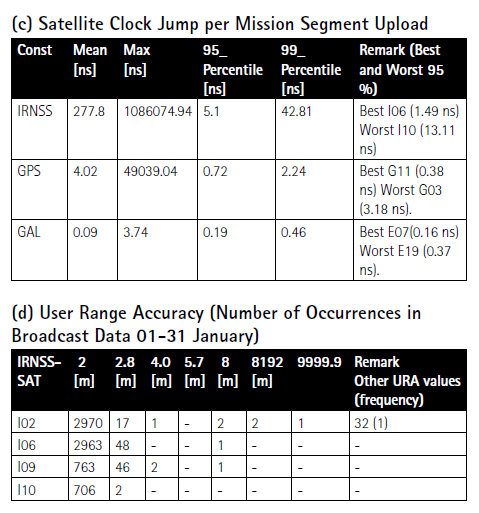
b. SISRE-Orbit (only orbit impact on the range error), SISRE (both orbit and clock impact), and SISRE-PPP (as seen by the users of carrier phase signals, where the ambiguities absorb the unmodelled biases related to satellite clock and orbit estimations. Satellite specific clock bias is removed) (Hauschlid et.al, 2020).c. Clock Discontinuity: The jump in the satellite clock offset between two consecutive batches of data uploads from the ground mission segment. It is indicative of the quality of the satellite atomic clock and associated clock model.
d. URA: User Range Accuracy as an indicator of the confidence on the accuracy of satellite ephemeris. It is mostly used in the integrity computation of RAIM.
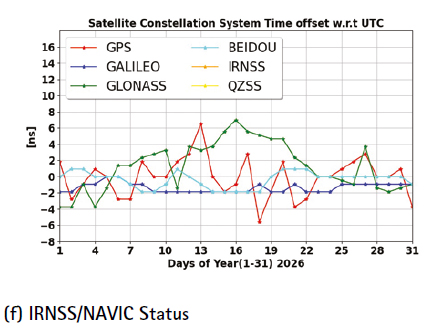
e. GNSS-UTC offset: It shows stability of the timekeeping of each constellation w.r.t the UTC.
f. Status Update on the IRNSS/ NAVIC: A technical overview on the IRNSS/NAVIC system, its coverage and performance analysis is provided
Note:- for India’s IRNSS there are no precise satellite clocks and orbits as they broadcast only 1 frequency which does not allow the dual frequency combination required in precise clock and orbit estimation; as such, only URA and Clock Discontinuity is analyzed.
(f) IRNSS/NAVIC Status
The Indian Regional Navigation Satellite System (IRNSS), operationally known as NavIC, has progressed from an experimental concept into a functioning regional navigation and timing system. Designed to provide continuous coverage over India and surrounding regions, NavIC employs a hybrid constellation of geostationary (GEO) and inclined geosynchronous (IGSO) satellites, enabling consistently high elevation angles across the subcontinent. The original constellation consisted of seven satellites—three GEO spacecraft located near 32.5°E, 83°E and 131.5°E, and four IGSO satellites inclined at approximately 29° with ground tracks centered over India.
NavIC initially transmitted signals on L5 and S-band, with the more recent NVS-01 generation adding L1 capability to improve interoperability and user-segment adoption. Early spacecraft relied on imported SpectraTime rubidium atomic clocks, several of which experienced failures; the complete loss of all three clocks on IRNSS-1A rendered the satellite unusable for navigation. These shortcomings led ISRO to develop indigenous clock technologies, culminating in the launch of NVS-01 in 2023 carrying the first Indian-built rubidium atomic clock—an important milestone in strengthening long-term system resilience.
In its early operational years, NavIC demonstrated strong performance, with ISRO reporting meter-level dual frequency positioning accuracy and timing stability at the tens of nanoseconds level. High elevation geometry, robust dual-frequency ionospheric correction, and stable broadcast ephemerides contributed to an adequate regional performance as long as sufficient healthy satellites were available.
Constellation Geometry and Its Implications
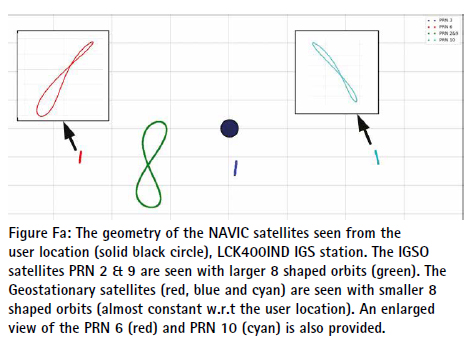
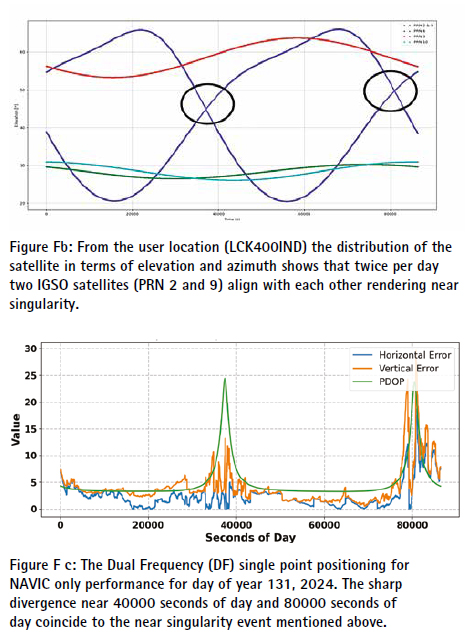
An analysis using the LCK400IND IGS station (Lucknow) provides insight into NavIC’s real-world behavior. The GEO/IGSO architecture typically ensures visibility of four to five satellites at moderate to high elevation angles. Figure Fa illustrates this geometry: GEO satellites (PRNs 3, 6, and 10) appear nearly stationary from the user location, while IGSO satellites (PRNs 2 and 9) trace elongated figure8 ground tracks due to their inclination.
However, the limited constellation size introduces recurring daily geometric weaknesses. As shown in Figure Fb, PRN 2 and PRN 9 align along nearly the same line of sight twice per day, creating near-singularity events. During these intervals the geometry matrix becomes poorly conditioned, DOP values rise sharply, and the covariance inflates— amplifying the impact of even modest measurement noise. Although these events do not necessarily cause position solution outages, they reduce robustness and consistency.
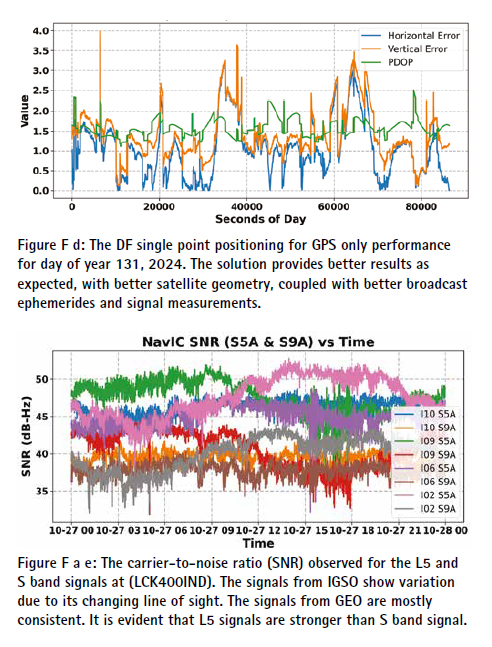
This effect appears clearly in the user-domain results. Figure Fc shows the dual-frequency NavIConly single-point positioning (SPP) solution for DOY 131/2024, where two pronounced divergences near 40,000 s and 80,000 s correspond precisely to the near-alignment periods. In comparison, Figure Fd presents the GPS-only DF SPP solution for the same day, demonstrating stable behavior due to superior geometry and higher-quality broadcast ephemerides—highlighting the structural advantage of larger constellations.
Signal Strength Characteristics
Carrier-to-noise density ratios recorded at LCK400IND (Figure Fe) show:
• GEO satellites provide consistent, stable C/N- values due to their nearly fixed line of sight.
• IGSO satellites exhibit periodic C/N- variations driven by their elevation and azimuth cycles.
• L5 signals are consistently stronger than Sband, resulting in more robust tracking and lower code measurement noise.
In recent years, however, intermittent jamming and interference events have become increasingly evident in L1 band and in some cases other NavIC frequency bands. These events manifest as abrupt C/N- degradation, elevated measurement noise, and occasional loss of lock. While often short-lived, such interference exacerbates performance degradation during geometry-limited periods.
Overall System Health and Reliability
NavIC continues to meet its intended regional performance levels when:
• at least four satellites are available,
• geometry is favorable, and
• signal conditions are stable.
However, overall system reliability has declined due to:
• aging satellites and partial payload degradations,
• historical clock failures,
• slow constellation replenishment,
• increased radio-frequency interference, and
• inherent geometric limitations of a seven satellite regional system.
The introduction of indigenous atomic clocks represents a pivotal advancement, but NavIC currently remains in a transition phase. Without timely satellite replacements, expanded signal capability, and enhanced interference mitigation, the gap between the system’s architectural potential and realized operational performance will continue to widen.
A new analysis of NavIC and GAGAN characteristics and performance will be included each month to help readers better understand the discussions presented above.
Monthly Performance Remarks:
1. Satellite Clock and Orbit Accuracy:
• The performance looked like previous months.
• A new analysis of NavIC and GAGAN characteristics and performance will be included each month to help readers better understand the discussions presented above.
2. The UTC Prediction (GNSS-UTC):
•IRNS and QZSS have no BRDC UTC values in the BRDC messages.
References
Alonso M, Sanz J, Juan J, Garcia, A, Casado G (2020) Galileo Broadcast Ephemeris and Clock Errors Analysis: 1 January 2017 to 31 July 2020, MDPI
Alonso M (2022) Galileo Broadcast Ephemeris and Clock Errors, and Observed Fault Probabilities for ARAIM, Ph.D Thesis, UPC
Bento, M (2013) Development and Validation of an IMU/GPS/Galileo Integration Navigation System for UAV, PhD Thesis, UniBW.
BIMP (2024 a) https://e-learning.bipm. org/pluginfile.php/6722/mod_label/ intro/User_manual_cggtts_analyser. pdf?time=1709905608656
BIMP (2024 b) https://e-learning. bipm.org/mod/folder/view. php?id=1156&forceview=1
BIMP (2024 c) https://cggtts analyser.streamlit.app
Bruggemann, Troy & Greer, Duncan & Walker, R.. (2011). GPS fault detection with IMU and aircraft dynamics. IEEE Transactions on Aerospace and Electronic Systems – IEEE TRANS AEROSP ELECTRON SY. 47. 305-316. 10.1109/TAES.2011.5705677.
Cao X, Zhang S, Kuang K, Liu T (2018) The impact of eclipsing GNSS satellites on the precise point positioning, Remote Sensing 10(1):94
Chen, K., Chang, G. & Chen, C (2021) GINav: a MATLAB-based software for the data processing and analysis of a GNSS/IMU integrated navigation system. GPS Solut 25, 108. https:// doi.org/10.1007/s10291-021-01144-9
Curran, James T. & Broumendan, Ali. (2017). On the use of Low-Cost IMUs for GNSS Spoofing Detection in Vehicular Applications.
Dhital N (2024) GNSS constellation specific monthly analysis summary, Coordinates, Vol XX, Issue 1, 2, 3, 4
Dhital N (2025) GNSS constellation specific monthly analysis summary, Coordinates, Vol XXI, Issue 1
GINAv (2025). https://geodesy.noaa. gov/gps-toolbox/GINav.shtml
Goercke, L (2017) GNSS-denied navigation of fixed-wing aircraft using low-cost sensors and aerodynamic motion models, PhD Thesis, TUM.
GROOPS (2025) GROOPS Documentation and Cookbook. https://groops-devs. github.io/groops/html/index.html
GSC (2023) Galileo Q3 Performance Report. https://www.gsc-europa. eu/sites/default/files/sites/all/files/Galileo-OS-Quarterly-Performance_ Report-Q3-2023.pdf
Guo, Jing & Chen, Guo & Zhao, Qile & Liu, Jingnan & Liu, Xianglin. (2017). Comparison of solar radiation pressure models for BDS IGSO and MEO satellites with emphasis on improving orbit quality. GPS Solutions. 21. 10.1007/s10291-016-0540-2.
Guo F, Zhang X, Wang J (2015) Timing group delay and differential code bias corrections for BeiDou positioning, J Geod,
Hauschlid A, Montenbruck O (2020) Precise real-time navigation of LEO satellites using GNSS broadcast ephemerides, ION
IERS C04 (2024) https://hpiers.obspm.fr/ iers/eop/eopc04/eopc04.1962-now
IGS (2019) GNSS Attitude Quaternions Exchange using ORBEX
IGS (2021) RINEX Version 4.00 https://files.igs.org/pub/data/ format/rinex_4.00.pdf
InsideGNSS (2024) Working papers: upgrading galileohttps://insidegnss.com/ working-papers-upgrading-galileo/
Jiabo G, Xingyu Z, Yan C, Mingyuan Z (2021) Precision Analysis on Reduced-Dynamic Orbit Determination of GRACE-FO Satellite with Ambiguity Resolution, Journal of Geodesy and Geodynamics (http://www. jgg09.com/EN/Y2021/V41/I11/1127)
Kj, Nirmal & Sreejith, A. & Mathew, Joice & Sarpotdar, Mayuresh & Suresh, Ambily & Prakash, Ajin & Safonova, Margarita & Murthy, Jayant. (2016). Noise modeling and analysis of an IMU-based attitude sensor: improvement of performance by filtering and sensor fusion. 99126W. 10.1117/12.2234255.
Li M, Wang Y, Li W (2023) performance evaluation of real-time orbit determination for LUTAN-01B satellite using broadcast earth orientation parameters and multi GNSS combination, GPS Solutions, Vol 28, article number 52
Li W, Chen G (2023) Evaluation of GPS and BDS-3 broadcast earth rotation parameters: a contribution to the ephemeris rotation error Montenbruck
Liu, Yue & Liu, Fei & Gao, Yang & Zhao, Lin. (2018). Implementation and Analysis of Tightly Coupled Global Navigation Satellite System Precise Point Positioning/Inertial Navigation System (GNSS PPP/IMU) with IMUufficient Satellites for Land Vehicle Navigation. Sensors. 18. 4305. 10.3390/s18124305.
Mayer-Guerr, T., Behzadpour, S., Eicker, A., Ellmer, M., Koch, B., Krauss, S., Pock, C., Rieser, D., Strasser, S., Suesser Rechberger, B., Zehentner, N., Kvas, A. (2021). GROOPS: A software toolkit for gravity field recovery and GNSS processing. Computers & Geosciences, 104864. https:// doi.org/10.1016/j.cageo.2021.104864
Montenbruck O, Steigenberger P, Hauschlid A (2014) Broadcast versus precise ephemerides: a multi-GNSS perspective, GPS Solutions
Liu T, Chen H, Jiang Weiping (2022) Assessing the exchanging satellite attitude quaternions from CNES/CLS and their application in the deep eclipse season, GPS Solutions 26(1
Montenbruck O, Steigenberger P (2024) The 2024 GPS accuracy improvement initiatives, GPS Solutions
Liu T, Chen H, Jiang Weiping (2022) Assessing the exchanging satellite attitude quaternions from CNES/CLS and their application in the deep eclipse season, GPS Solutions 26(1)
Montenbruck O, Steigenberger P (2024) The 2024 GPS accuracy improvement initiatives, GPS Solutions
Montenbruck O, Steigenberger P, Hauschlid A (2014) Broadcast versus precise ephemerides: a multi-GNSS perspective, GPS Solutions
Montenbruck O, Hauschlid A (2014 a) Differential Code Bias Estimation using MultiGNSS Observations and Global Ionosphere Maps, ION
Montenbruck, O., Schmid, R., Mercier, F., Steigenberger, P., Noll, C., Fatkulin, R., Kogure, S. & Ganeshan, A.S. (2015) GNSS satellite geometry and attitude models. Advances in Space Research 56(6), 1015-1029. DOI: 10.1016/j.asr.2015.06.019
Niu, Z.; Li, G.; Guo, F.; Shuai, Q.; Zhu, B (2022) An Algorithm to Assist the Robust Filter for Tightly Coupled RTK/IMU Navigation System. Remote Sens. 2022, 14, 2449. https://doi.org/10.3390/rs14102449
Schmidt, G, Phillips, R (2010) IMU/ GPS Integration Architecture Performance Comparisons. NATO.
Space (2025) https://www.space.com/ astronomy/earth/mysterious-boost-to-earthsspin-will-make-aug-5-one-of-the-shortestdays-on-record
Steigenberger P, Montenbruck O, Bradke M, Ramatschi M (2022) Evaluation of earth rotation parameters from modernized GNSS navigation messages, GPS Solutions 26(2)
Strasser S (2022) Reprocessing Multiple GNSS Constellations and a Global Station Network from 1994 to 2020 with the Raw Observation Approach, PhD Thesis, Graz University of Technology
Suvorkin, V., Garcia-Fernandez, M., González-Casado, G., Li, M., & Rovira-Garcia, A. (2024). Assessment of Noise of MEMS IMU Sensors of Different Grades for GNSS/IMU Navigation. Sensors, 24(6), 1953. https:// doi.org/10.3390/s24061953
Sylvain L, Banville S, Geng J, Strasser S (2021) Exchanging satellite attitude quaternions for improved GNSS data processing consistency, Vol 68, Issue 6, pages 2441-2452
Tanil, Cagatay & Khanafseh, Samer & Pervan, Boris. (2016). An IMU Monitor agaIMUt GNSS Spoofing Attacks during GBAS and SBAS-assisted Aircraft Landing Approaches. 10.33012/2016.14779.
Walter T, Blanch J, Gunning K (2019) Standards for ARAIM ISM Data Analysis, ION
Wang, C & Jan, S (2025). Performance Analysis of MADOCA-Enhanced Tightly Coupled PPP/ IMU. NAVIGATION: Journal of the IMUtitute of Navigation March 2025, 72 (1) navi.678; DOI: https://doi.org/10.33012/navi.678
Wang N, Li Z, Montenbruck O, Tang C (2019) Quality assessment of GPS, Galileo and BeiDou-2/3 satellite broadcast group delays, Advances in Space Research
Wang J, Huang S, Lia C (2014) Time and Frequency Transfer System Using GNSS Receiver, Asia Pacific Radio Science, Vol 49, Issue 12
https://cggtts-analyser.streamlit.app
Yang N, Xu A, Xu Z, Xu Y, Tang L, Li J, Zhu H (2025) Effect of WHU/GFZ/CODE satellite attitude quaternion products on the GNSS kinematic PPP during the eclipse season, Advances in Space Research, Volume 75, Issue 1,
Yao J, Lombardi M, Novick A, Patla B, Sherman J, Zhang V (2016) The effects of the January 2016 UTC offset anomaly on GPS-controlled clocks monitored at NIST. https:// tf.nist.gov/general/pdf/2886.pdf
Note: References in this list might also include references provided to previous issues.
Data sources and Tools:
https://cddis.nasa.gov (Daily BRDC); http:// ftp.aiub.unibe.ch/CODE_MGEX/CODE/ (Precise ProdSucts); BKG “SSRC00BKG” stream; IERS C04 ERP files
(The monitoring is based on following signals- GPS: LNAV, GAL: FNAV, BDS: CNAV-1, QZSS:LNAV IRNSS:LNAV GLO:LNAV (FDMA))
Time Transfer Through GNSS Pseudorange Measurements: https://e-learning.bipm.org/ login/index.php
Allan Tools, https://pypi.org/project/ AllanTools/
gLAB GNSS, https://gage.upc.edu/en/learning materials/software-tools/glab-tool-suite.










 (2 votes, average: 5.00 out of 5)
(2 votes, average: 5.00 out of 5)





Leave your response!