
| GNSS | |
EGNOS multimodal performance
This paper addresses the level of performance reached by EGNOS in SoL Service in aviation and, for the fi rst time, results on preliminary SoL Service in maritime and Open Service in agriculture and mapping during 2016 |
 |
|
 |
|
 |
|
 |
|
The European Geostationary Navigation Overlay Service (EGNOS) provides an augmentation of the open public service offered by the GPS. EGNOS makes GPS suitable for safety critical applications such as civil aviation. As the European satellitebased augmentation system (SBAS), EGNOS provides (free of charge) both corrections and integrity information about the GPS system, delivering opportunities for sub-metre level positioning for improving existing applications or developing a wide range of new ones. EGNOS offers three services: Open Service, Safety-of-life Service and EDAS.
• The EGNOS Open Service (OS), improving the accuracy down to sub-metre level of the GPS signals, targets mass market/general purpose applications by augmenting the GPS standalone performances. This positioning accuracy improvement is achievable thanks to the correction of the error sources affecting the GPS signals related to satellite clocks, satellite payload induced signal distortions, satellite position uncertainties and ionospheric effects. The EGNOS OS is accessible in Europe and some areas beyond to any user equipped with an appropriate SBAS compatible receiver for which no specific receiver certification is required. The EGNOS OS has been qualified by defining the minimum compliance area where the user is able to calculate its position with a specified level of accuracy defined in the EGNOS OS Service Definition Document (SDD) [1].
• The EGNOS Safety of Life Service (SoL), firstly conceived for aviation, consists of signals for timing and positioning intended for most transport applications in different domains where lives could be endangered if the performance of the navigation system is degraded below specific accuracy limits without giving notice in the specified time to alert. This requires that the relevant authority of the particular transport domain determines specific requirements for the navigation service based on the needs of that domain, as well as certification procedures if necessary. The EGNOS SoL Service Definition Document (SDD) [3] is published by the European GNSS Agency (GSA) and presents the minimum performance characteristics of Service. The EGNOS SoL Service is based on differential corrections and integrity data provided through all Messages Types transmitted by EGNOS [2].
• The EGNOS Data Access Service (EDAS) is the ground-based access (through the Internet) to realtime and historical EGNOS data which collects all data generated by the EGNOS infrastructure.
This paper is organized in four different user’s domains: aviation, maritime, agriculture and mapping. Each section shows the level of performance reached by EGNOS during 2016. The performance parameters for aviation, mapping and agriculture are well known by the user community. For maritime, it is included a definition of the identified performance parameters specifically tailored to meet maritime user needs.
Aviation
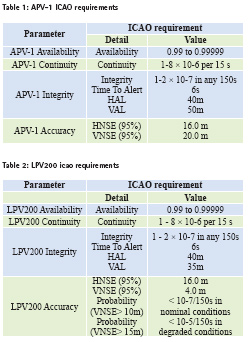
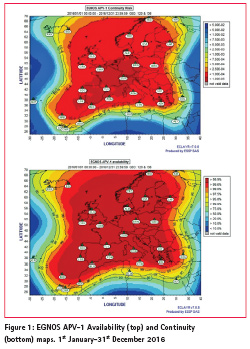
EGNOS SoL service is compliant with operational requirements set by International Civil Aviation Organization for NPA (Non Precision Approach), APV- 1 (Approach with Vertical Guidance) and LPV200 requirements, except for specific deviations [3]. This paper assesses the performance with respect the requirement of the two most stringent operations APV- 1 and LPV200 (Table 1 and Table 2).
Following results present the LPV200 and APV-1 performance from the 1st January to the 31st of December 2016. During this period, EGNOS broadcast the operational SIS through GEOs PRN120 and PRN136, using 39 RIMS for monitoring around 30 GPS satellites.
Availability and Continuity
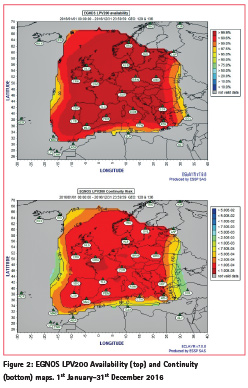
ESSP monitoring of APV-1 and LPV200 availability and continuity results uses fault-free techniques [5], what make them independent of the data obtained in a receiver and therefore unaffected by local effects such as multipath, receiver noise and failures. This characteristic enables the computation of results over the EGNOS service area using consolidated data, including remote or even oceanic areas in which no receivers are available and locations in which a detailed monitoring is needed, i.e. airports with SBAS procedures approved or under validation (Figure 1).
Computation of LPV200 performance accounts for two extra requirements with respect to APV-1. Firstly, the probability that the VNSE exceeds 10m in nominal system operation conditions shall be less than 10-7/ per approach. Secondly, the probability that the VNSE exceeds 15m in degraded system operation conditions shall be less than 10-5/per approach. These conditions refer to both the internal status of the system, essentially EGNOS RIMS and GEO satellites, and external conditions such as number of GPS satellites in the constellation or environmental conditions which might include severe ionospheric activity. Under such high ionospheric activity or geomagnetic storm periods caused by sudden eruptions of the Sun, SBAS systems can experience residual ionospheric effects owing to increased ionospheric variability impossible to be effectively modelled and corrected.Areas compliant to availability and continuity requirements but not meeting the two extra requirements on accuracy tail distribution are excluded from maps and plotted in grey (Figure 2).
Availability and continuity of APV-1 and LPV200 service for 2016 shows a very good coverage in most of the ECAC. The 2016 availability meets the APV-1 and LPV200 commitment area defined in the SoL Service Definition Document [3] in 98.4% and 99.0% respectively.
User domain integrity
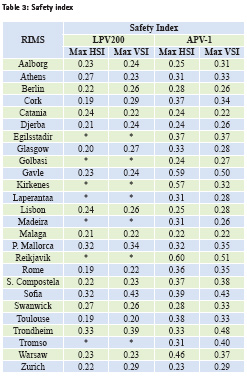
The Safety Index, defined as the ratio between the Position error and the Protection Level (xPE/xPL) provides a clear indicator of the integrity margin obtained using EGNOS corrections. This indicator should always remain below 1, what ensures that no lossof- integrity events take place.
The maximum Horizontal and Vertical Safety Index (HSI and VSI) at RIMS sites located within the APV-1 commitment area [3] over the period is included in the Table 3. LPV200 results are not presented for RIMS outside the LPV200 commitment area which is smaller than APV-1 commitment.
Note the maximum value is 0.60, which means an integrity margin of 40%.
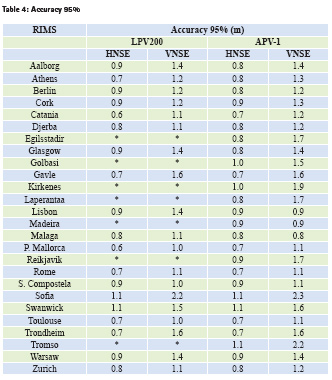
Horizontal and Vertical Accuracy 95% The LPV200 and APV-1 Accuracy 95%
values at the RIMS sites, when the LPV200 and APV-1 service is available, are included in Table 4. The Horizontal and Vertical Navigation System Error (HNSE and VNSE) for every station is well below the corresponding requirement.
LPV200 Vertical accuracy tails
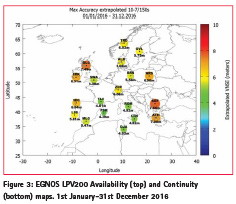
LPV200 accuracy tail requirement is twofold (nominal operational conditions and degraded conditions) but data classification into one of these categories is not straightforward. Thus, the analysis performed assumes all data in the period is subjected to the more stringent requirement; Pr(VNSE<10m)<10-7/150s for nominal operational conditions. It is only in case the extrapolated VNSE to the 10-7/150s exceeds the 10m nominal conditions requirement when a specific assessment determines if the samples leading to the non-compliance result could be considered within degraded conditions. Size and color of circles in Figure 3 indicate the extrapolated VNSE calculated.
All of them are below 10m and therefore meeting the 10-7/150s requirement.
Maritime
EGNOS can complement the existing maritime radionavigation systems (e.g. DGNSS) in the European region for enhanced accuracy and integrity information where there is no backup infrastructure or in poorly covered environments. Since 2014 the European GNSS Agency (GSA) and the EGNOS service provider (ESSP SAS) are working together to foster the use of EGNOS among merchant vessels and shape up a potential EGNOS Safety of Life service adapted to the maritime needs and using the current EGNOS V2 Signal in Space (SiS). This service will meet the International Maritime Organization (IMO) performance requirements detailed on IMO Res. A.1046 (27) for systems to be recognized as components of the worldwide radionavigation systems (WWRNS) in terms of Ocean Waters and Harbour entrances, Harbour approaches and Coastal waters.
The development of a new EGNOS Safety of Life service for maritime implies two key tasks at service performance level. The first one is the identification and definition of a set of performance parameters required for a complete characterization of the new service taking into account IMO Res. A.1046 (27) [6] and also the particularities of EGNOS and the second task comprises a preliminary performance assessment to grasp an initial idea of the level of service reached by the new service. For the sake of clarity, the EGNOS Safety of Life service for maritime based on IMO Res. A.1046 (27) is called EGNOS 1046.
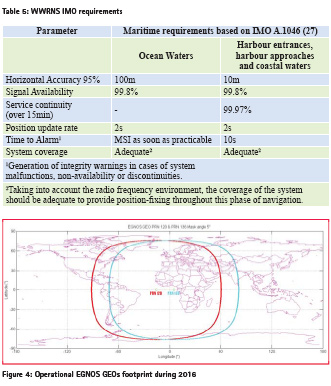
IMO performance requirements in Table V come with no detailed definition. Thus, an additional task consists on defining the parameters to account for the specific characteristics of EGNOS as a maritime radionavigation aid when compared to, for example, others such as DGNSS. Reference [7] defines how to calculate the performance parameters for DGNSS. This approach has been used to understand parameters in Table 5 and propose the following definitions for IMO performance parameters. Note that, for EGNOS, one additional parameter (Service Availability) is included.
Signal Availability
Signal availability is given if the radio reception of the signal is ensured in the specified system coverage and if the signal is provided according to its specification. EGNOS 1046 Signal Availability assesses the percentage of time the EGNOS SiS is providing messages [2] that can be processed by SBAS type-approved receivers.
EGNOS broadcasts through two operational GEO satellites PRN120 & PRN 136 during 2016. This redundancy will benefit EGNOS 1046 receivers capable of instantaneous GEO switching and therefore, signal availability has to be calculated as the combined signal availability of both operational EGNOS GEOs. EGNOS 1046 signal availability reaches the same value in the intersection area of both EGNOS GEOs footprint (Figure 4).
From May 2016 to March 2017, Signal Availability reached 100% meeting the IMO requirement of 99.8% for the intersection area of both EGNOS GEOs footprint.
Horizontal Accuracy 95%
Horizontal Accuracy is the 95% percentile of the Horizontal Position Error (HPE) distribution. HPE is the 2D radial error of the instantaneous measured position respect to the true instantaneous position.
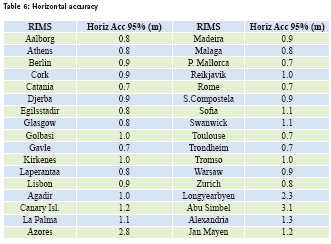
Table 6 shows the Horizontal Accuracy 95% values in meters in EGNOS RIMS (Table 6).
All RIMS stations meet the IMO requirements of 10m 95% for harbour entrances, harbour approaches and coastal waters surrounding Europe and IMO requirements of 100m 95% for ocean waters.
Service Availability
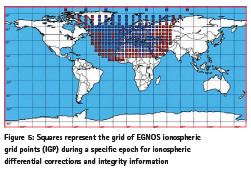
Performance parameters in Table 5 come from IMO Res. A.1046 (27) which is a set of requirements that shall be met by radionavigation aids to be recognized as components of IMO WWRNS. As a radionavigation aid, EGNOS has a particularity: EGNOS GEO satellites broadcast messages over the GEOs footprint (Figure 4) but EGNOS performance is not the same in the whole EGNOS GEO footprint. For example, in some areas where EGNOS SiS is received, EGNOS 1046 receivers will not be able to compute a navigation solution based on EGNOS. This happens because EGNOS messages include ionospheric corrections only for a region around Europe (Figure 5) and, for a specific epoch, only for a subset of GPS satellites. This subset of satellites is the specific subset in view from Europe and the surrounding area (Figure 6):
Figure 5 represents in blue the monitored IGPs for a specific epoch. A monitored IGP means the ionospheric differential corrections and integrity information is available and can be used by EGNOS users. Figure 5 represents in red the not monitored IGPs.
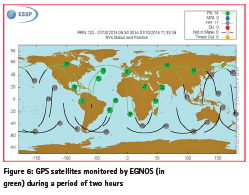
A similar issue happens for each GPS satellite. For example, Figure 6 presents in green GPS satellites monitored by EGNOS during a period of two hours.
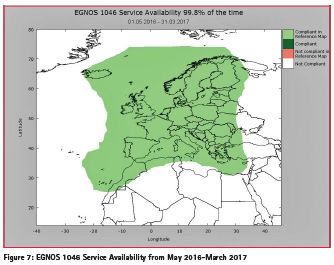
A GPS satellite is monitored if EGNOS differential corrections and integrity information is available for that GPS satellite and then it can be used for the navigation solution. In grey GPS satellites which were not monitored during that period of time. As a result, users in Europe and the surrounding area can use EGNOS differential corrections and integrity information to improve their positioning. On the other hand, some users within the footprint but located far away from Europe landmasses will not be able to calculate a navigation solution based on EGNOS 1046 service although they receive EGNOS SiS. For example, users located in Africa’s sub-Saharan region receive EGNOS SiS but, as only a few of the satellites in view by them are monitored and none of IGPs are monitored, sub-Saharan users are not capable to calculate an EGNOS 1046 navigation solution. In order to differ service performance for users that are able to calculate a navigation solution for a particular epoch from those users also within the footprint that are not, a parameter must be defined. This performance parameter is the EGNOS Service Availability and it is the percentage of time a position calculated using EGNOS 1046 is available in a specific location. EGNOS 1046 Service Availability shall be calculated considering receivers are able to do instantaneous GEO switching. For Service Availability, which is not an IMO requirement, it is proposed a target value of 99.8% that will ensure very high quality service. Note that the lack of Signal Availability is one of the events affecting the Service Availability. Figure 7 shows the Service Availability from May 2016 to March 2017.
Service Continuity
The Service continuity is the probability that a lack of navigation solution will start during the Continuity Time Interval (CTI), which is defined to be 15 min [7]. EGNOS 1046 Service Continuity is closely linked to Service Availability. Every transition from a service available to unavailable is a service continuity event. Service Continuity is calculated using combined GEOs. Equation (1) shows how EGNOS 1046 Service Continuity is calculated [7]:
Service Continuity=1-CTI/MTBF (1)
Where CTI is 15 min and MTBF is the “Mean Time Between Failures”, as measured by the service provider [7], e.g.over a period of two years. EGNOS SiS monitoring from May 2016 to March 2017, reports the following percentages of Service Continuity for harbour entrances, harbour approaches and coastal waters surrounding Europe. Note there is no IMO continuity requirement for ocean waters.
The reduced area meeting the Service Continuity IMO requirement (99.97% over 15min) over some areas is due to events that affected EGNOS position solution on limited over the period; in particular, in August and September several of them (e.g. 01/08, 04/08, 17/08, 15/09, 25/09, 26/09) impacted the coverage in the North. These events reduced drastically the Service Continuity area reaching the 99.97% over 15 min.
Time To Alarm
The requirement in IMO Resolution A.1046 (27) is 10 seconds for harbour entrances, harbour approaches and coastal waters. EGNOS design ensures timely integrity alarms to GPS satellites for pseudorange and ionospheric corrections in 6 seconds.
Since operational, EGNOS has successfully responded to GPS anomalies sending timely alerts for SoL users within the Time to Alert (TTA). EGNOS TTA response to GPS events is monitored at pseudorange level by ESSP.
Position update rate
EGNOS 1046 receivers must be designed to meet the 2 seconds update rate required by IMO Resolution A.1046(27).
Service Coverage
The service coverage is a designated geographical area where EGNOS provides adequate performance throughout a phase of navigation. By “adequate” it is understood that for a specific location EGNOS 1046 meets for Ocean Waters: the Horizontal Accuracy 95%, Signal Availability and Service Availability and for Harbour entrances, Harbour approaches and coastal waters the Horizontal Accuracy 95%, Signal Availability, Service Availability, Service Continuity and Time to Alarm.
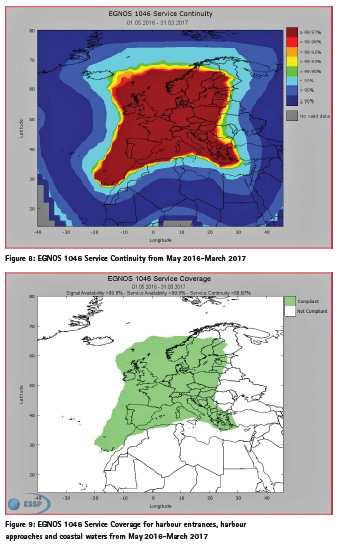
Figure 9. Identifies Service Coverage which is the geographical area where EGNOS met IMO requirements for Harbour entrances, Harbour approaches and coastal water.
Green area (>99.8% service availability) in Figure 7 delimits the service coverage area for the case of navigation in ocean waters, since there is no requirement for continuity.
Agriculture
According to [10], more 200 000 tractors were equipped with GNSS in Europe in 2013. However, GPS standalone accuracy is not enough for agriculture applications and the level of accuracy required is linked with the type of crop and the needed task to be carried to cultivate such crop. The most commonly required technologies are those providing position with pass-topass accuracy covering the range of 20- 30 cm level. EGNOS benefits agriculture through a minimal investment obtaining optimization of yields, increment of labour productivity and profit margins, extension of equipment life, reduction of driver fatigue and reducing overapplication of fertilizers and herbicides.
Pass to Pass accuracy is the term used by farmers to describe their user needs in relation with accuracy and also the term used by GNSS manufacturers to describe the accuracy the equipment can provide. Pass-to-pass accuracy is defined as the accuracy which can be achieved over a 15 minute window, being 15min the approximate time to make a pass in a typical field. Figure 10. explains graphically the concept.
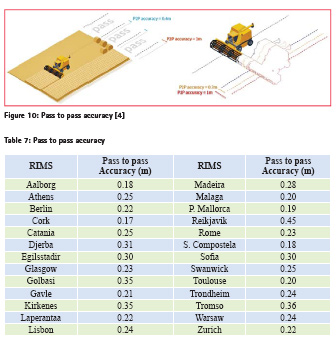
Once a tractor has done a pass in the field, upon return the driver attempts to place the tractor at the same starting position. However, according to the GNSS equipment, the tractor is not exactly in the same place: there is a bias. This bias is the so called pass-to-pass accuracy. Reference [8] describes in detail how to compute this accuracy.
Two displacement directions have been selected to assess the value of the pass-topass accuracy (North-South and East-West). It is important to note that values in column “Pass-to-pass Accuracy” represent the maximum pass-to-pass accuracy error that would be found by agriculture machinery moving in one of the selected directions (direction N-S or E-W). Although, these two directions are taken as a reference for calculations, any other movement direction selected by the agriculture user would find the same level of pass-to-pass accuracy. This performance assessment (Table 7) shows the values of the worst daily passto- pass accuracy using EGNOS in several RIMS locations in Europe during 2016.
Data have been assessed to remove potential local issues. Values calculated in these stations are also valid as a reference for agriculture users within the whole EGNOS OS commitment area [1] and not only for users in the very vicinity of the selected stations.
Mapping
Nowadays the usage of maps has become ubiquitous. From ordinary citizens to professionals performing their duties, it is becoming essential to have visual representation of georeferenced objects: to manage natural resources, to view inventories or stocks, to locate interesting places, to organize logistics and so on. Underlying all those applications there is a common need: objects need to be positioned. EGNOS is a suitable solution when it is needed to locate great amount of points with sub-meter accuracy in an easy, affordable and flexible way and in real time. EGNOS can boost the data capture, usually the most time consuming process in the development of a mapping (road signaling, forestry inventories, on-the-spot checks of area based subsidies, etc…) or GIS application.
In the particular case of mapping, the positioning accuracy is defined mainly for horizontal coordinates (although EGNOS provides also augmented*
vertical position). The following parameters are key performance indicators for mapping users:
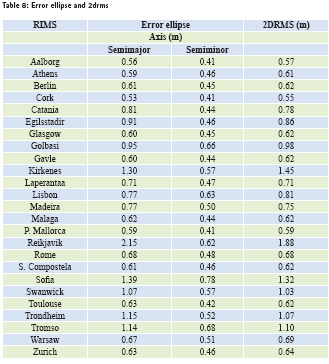
• 95% Error Ellipse is an approximate graphical representation of the standard deviation in two directions (lowest and highest precision directions).
• The 2DRMS represents the twice the distance root mean square of the two dimensions instantaneous horizontal error.
Accuracy for mapping is reported in twenty-five RIMS stations. These stations are referenced at centimeterlevel and the error is assessed every second. Table 8 presents the average daily EGNOS 95% error ellipse and the 2DRMS in specific locations for 2016:
Values calculated in these stations are also valid as a reference for mapping users within the whole EGNOS OS commitment area [1] and not only for users in the vicinity of the selected stations.
Reporting EGNOS performance
One of the main roles of the ESSP consists on the continuous monitoring of the performance of EGNOS with the objective of ensuring that the quality of the services provided to the EGNOS users is in line with the level of performance specified in the Safety of Life (SoL) [3] and Open Service (OS) [1] SDDs.
This information is accessible to the EGNOS users through the different reporting means such as the EGNOS Monthly Performance Report, the EGNOS User Support Website and EGNOS User Helpdesk. [4]
Conclusions
The paper presents a summary of EGNOS performance during 2016 in aviation, maritime, agriculture and mapping. For aviation, availability, integrity, continuity and accuracy present excellent values both for APV- 1 and LPV200. For maritime, the paper defined a preliminary set of parameters to characterize a future EGNOS SoL service for maritime based on IMO Res. A1046(27) and presented a 9-month performance analysis. For agriculture and mapping, the paper shows that values for 2016 were well within the range of values required by the end users. The pass to pass accuracy, the 2DRMS and error ellipse also showed excellent EGNOS performance.
References
[1] European GNSS Agency, “EGNOS Open Service (OS) Service Definition Document”, Rev. 2.2. in http://egnosportal. gsa.europa.eu . February 2015.
[2] RTCA Special Committee 159. “Minimum Operational Performance Standards for GPS/ WAAS airborne equipment,” RTCA Inc, December 2006.
[3] European GNSS Agency, “EGNOS Safety of Life (SoL) Service Definition Document”, Rev. 3.1. in http://egnosportal. gsa.europa.eu . September 2016.
[4] ESSP SAS. “EGNOS User Support Website,” in http://egnosuser- support.essp-sas.eu.
[5] R. Roldan R., P. Pintor, J. Gomez, C. De la Casa and R. Fidalgo. “The EGNOS Performance monitoring activities performed by the ESSP,” ENC 2014 proceedings, April 2014.
[6] International Maritime Organization, “Worldwide Radionavigation System, Resolution A.1046(27)”. December 2016.
[7] IALA “IALA Guideline No. 1112 On Peformance and Monitoring of DGNSS Services in the Frequency Band 283.5- 325KHz. Edition 1”. May 2015.
[8] International Organization for Standardization, “ISO 12188-1 Tractors and machinery for agriculture and forestry-Test procedures for positioning and guidance systems in agriculture- Part1: Dynamic testing of satellitebased positioning devices”, 2010.
[9] European GNSS Agency, “GNSS Market Report”, Issue 4. in www. gsa.europa.eu. March 2015.










 (No Ratings Yet)
(No Ratings Yet)





Leave your response!