| Applications | |
Building a low cost long range mapping drone
This study is focused on custom building a low-cost fixed wing drone for long range mapping applications under 2000 USD which significantly reduce the cost for the hardware |
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
Drones are becoming popular day by day in professional applications of mapping in the fields of surveying, agriculture, mining, structural inspection, etc. When it comes to mapping, drones are proven to provide accurate and very high-resolution products at low cost compared to other traditional remote sensing or surveying techniques. Today’s consumer grade multirotor drones which cost below 2000 USD for the hardware are capable of using for small area mapping applications. The major issue of multirotors in mapping applications is less flying time (approximately 30 mins) so it requires multiple flights and frequent change of batteries, which makes the mapping coverage significantly reduced. Using a fixed wing drone for mapping will solve this issue as fixed wings have high endurance. Considering the advantages of mapping with fixed wing drones, pioneering companies in the geomatics industry such as Sensefly, Trimble, and Leica have introduced survey grade drones to the market specifically for mapping purposes. These survey grade drones come as a reliable end to end package and with a very high price tag above 15000 USD.
This study is focused on custom building a low-cost fixed wing drone for long range mapping applications under 2000 USD which significantly reduce the cost for the hardware. The drone is equipped with a GNSS unit and intelligent flight controller, which provide the capability of executing autonomous missions, improving the reliability and adding the crucial safety functions as return to home. Free-sky open source radio system is used for the radio link. The Propulsion system is optimized in such a way to add the the proper amount of thrust to the airframe carrying a highresolution camera as the payload. The landing of the drone is a well-known problem for fixed wing category and it is addressed by integrating a parachute with automatic deployment function. The drone was successfully tested by mapping 1km2 area in a single flight, flying over 45 mins. The resulting 3cm resolution map has a verified planimetric accuracy of 34 cm without using GCPs. It was concluded that it is possible to custom build a long-range mapping UAV with a significantly reduced price yet resulting accurate and high-resolution maps.
Introduction
UAVs (Unmanned Aerial Vehicles) which are commonly known as Drones are new technology that revolutionized the field of remote sensing. With the increased popularity of drones among the community, their uses and importance are growing rapidly. Drones have already proven to be beneficial in Remote Sensing and GIS applications as they can fly autonomously and collect high quality imagery within a short acquisition period, which can be processed in to high accurate and high-resolution map products such as Orthomosaics, 3D points clouds, Digital surface models, 3D meshes, Contour maps, index maps, etc. Remotely sensed data obtained from drones are suited for various applications of mapping in both 2D and 3D domains. Few examples are environmental surveying, forest monitoring, agricultural mapping, terrain analysis, infrastructure monitoring, feasibility surveys, archaeology and cultural heritage mapping. Even drones are used for military purposes in the early stages, now it has been a common consumer tool in many fields.
Current status of drones in mapping
Today’s consumer grade drones are capable enough of obtaining data for many mapping applications. DJI’s Phantom series, which are the most popular consumer grade drones are now widely being used to map small areas at very low costs. These consumer grade drones are mainly purposed for photography and videography, so they come with stabilized, high quality cameras. Most of the consumer grade drones are also equipped with GNSS guided navigation system, intelligent flight controller and safety features such as return to home function which makes these drones “hardware ready” to be used in mapping. With the help of freely available third-party flight planning software, consumer grade drones can make very high-resolution maps yet saving the money for a survey grade UAV. Studies show that a 1000 USD DJI phantom 3 professional drone can tie up with 15000 USD survey grade Sensefly eBee, in terms of geolocation accuracy and resolution.
On the other hand, survey grade drones which come as a complete mapping solution is developed specifically for applications in geomatics ensuring the accuracy of the products.
Limitations of today’s drones in mapping
The main limitation of the consumer grade drones in mapping application is that the low flight time. Almost all the consumer grade drones which can be used for mapping are multi rotors which consist of multiple motors that power propellers to take flight and maneuvers the aircraft. The most common configuration, quadcopters have four rotors, but they can have as many as six or eight rotors (hexacopter and octocopter). As there are multiple motors constantly running to provide direct upthrust, the flying time of multirotors become significantly low which limits them only to be used in small area mapping.
The survey grade drones such as Sensefly eBee, Trimble UX 5 are using fixed wing airframes well designed to cover a large area in a single flight. They come as a complete mapping solution including proprietary flight planning software. The main purpose of survey grade drones is to collect high accurate data which guarantee the accuracy of the map products. Drones such as eBee RTK, eBee X, WingtraOne are equipped with RTK/PPK GNSS units which results stunning accuracy down to 3cm without ground control. In terms of accuracy, quality and productivity, today’s survey grade drones show maximum capabilities in mapping but limiting the number of users due to the high price. Most of the survey grade drones in the market are priced above 15000 USD. The cost of a survey grade drone adds up to the cost of maintenance, labour, and photogrammetric processing software which makes them only viable for large scale projects. DroneDeploy, a photogrammetric processing service provider reveals that 90% of commercial drone mapping customors use consumer grade drones that cost less than 1500 USD. One major reason behind the fact users choose consumer grade drones over survey grade drones is the high price of survey grade drones.
Problem statement
When analysing today’s drones, consumer grade drones are affordable and can be used in most of small area mapping applications resulting acceptable accuracy. But, there are no drones in the current market with a similar price which can be used in large area mapping.
Objective
Develop a low cost, long range, prototype drone under 2000 USD which is capable of mapping a large area
Methodology
The primary task of a mapping drone is to take the imaging system up in the air and accurately navigate through the desired flight path and facilitating the camera to collect images without an onboard pilot. There are 6 major aspects to focus on when custom building such UAV.

1. Airframe
2. Flight Controller
3. Positioning System
4. Propulsion System
5. Failsafe systems
6. Imaging system
Airframe
The airframe was selected considering five main factors i.e. safety, aerodynamic stability, range, payload, and cost. There are several categories of airframes available for drones. After analysing the options for airframes, fixed wing type is selected as it’s the most suitable to fulfil the objective of the study. The main limitation of the multi rotor is the low flying time. Helicopters and hybrid drones have considerable flying time, but they pose a risk to the public upon a crash as propellers are facing forward and the body is solid. Single rotors and hybrid drones are easy to operate when they are built perfect but the aerodynamic and control systems are sophisticated. When considering the fixed wing design, its relatively simple and lift is generated by the airflow passing in sides of aerofoil shape of the wings. So the energy is utilized efficiently compared to quad copters. Using a fixed wing increases the flying time and range which opens the possibility for long range mapping.
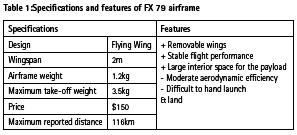
The airframe we have selected is Zeta FX- 79. The airframe is designed and made by Zeta, a Chinese based manufacture in RC aircrafts and its available worldwide. It is made with EPO (Expanded Polyolefin) which is a lightweight, mouldable foam which makes the FX-79 safe to operate in public locations as it does not threat human life or property. The propulsion system is at the rear of the drone which adds additional safety to the public. The material is durable to withstand skid landing or few low speed crash landings but will be torn apart upon high impact. Minor damages can be easily repaired using a contact adhesive. The FX 79 is a large wing with 2-meter wingspan provides lift for accompany all additional payload required for mapping. Front of the aircraft is modified to enclose the parachute system and strengthened with fiberglass tape.
This airframe is mostly popular with in the FPV (First Person View) community as a slow flying, stable long-range wing, which makes it a great candidate for aerial mapping. Stability in slow speeds is vital for the imaging system to take clear and crisp images and to obtain an accurate position at the exact time of the camera trigger. In general, when compared to traditional airframe design, the flying wings only have 2 control surfaces (elevons) to control all movements in roll, pitch, and yaw which makes the design simple but trading off the aerodynamic stability. However, the FX 79’s large wing span and vertical stabilizers make very stable flight performance with the help of the flight controller.
Flight controller
The flight controller is the brain of the drone which controls the airplane’s control surfaces based on sensor outputs and it also focuses on assisting or taking full control of a vehicle. Manoeuvring the plane to follow a reference trajectory while keeping the airframe steady by regulating the control surfaces is done by this device. Autopilots systems for drones have evolved significantly over time, capable of performing fully automated missions.
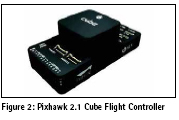
PIXHAWK 2.1 Cube
Pixhawk is an open-hardware which established a standard for readilyavailable, high-quality and low-cost autopilot hardware designs for the academic, recreation and developer communities. For this study, Pixhawk 2.1 flight controller is chosen considering its reliability and functions.
The Pixhawk 2.1 is designed to be a fully integrated single board flight controller with sufficient I/O for the most demanding of applications. In addition, the sensor performance and reliability have greatly been improved, with triple redundant IMU’s, and the capability to use up to 2 GPS modules. Through smart design, the cost for materials has been reduced which keeps the overall design simple, affordable and extremely light at only 75g per board.
The flight controller is loaded with the with the Ardupilot firmware which is the defines the functions and behaviour of the flight controller. Ardupilot open source firmware is matured and reliable for stable flight performance which also has great documentation and community support. Mission Planner is chosen as the ground control software, which monitors the drone during the flight.
Beside the stable flying, a mapping drone should have two vital functions.
1. Ability to execute a flight plan
2. Accurately trigger the camera at the desired location
The data requirement to make an accurate map using photogrammetric method is good quality images with sufficient overlap. To obtain such data, the drone should follow a precisely determined flight path which is calculated according to the required resolution of the map, overlap, and camera internal parameters.
The Ardupilot firmware supports flight planning out of the box where the tools are provided in MissionPlanner software. During a flight mission, the flight controller takes full control of the drone and navigates autonomously along the flight path. Pixhawk signals the camera using predefined PWM (pulse width modulation) signal at the exact moment where the photographs are needed to be taken and record the location at the time of trigger. After the flight, images are post processed with the flight log to precisely georeference the images with the location of capture.
Positioning system
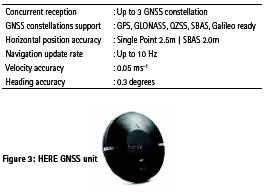
The GNSS positional module of the drone plays an important role in navigation and Geotagging the images. The drone is equipped with a navigation grade GNSS unit developed by HEX Technologies. The unit is named ‘HERE GNSS’ which is powered by a u-blox Neo M8N GNSS receiver and Honywell’s latest high precision 3-axis digital magnetometer (HMC5883L). Its sophisticated RFarchitecture and interference suppression mitigates multipath effects and ensures good navigation performance. As the GNSS unit is placed away from the other electronics of the drone, the magnetometer in the HERE unit is assigned to be the primary magnetometer which has the minimum interference from other electronics. The features of here GNSS unit are as follows:
Propulsion system
The propulsion system includes motor, propeller and ESC (electronic speed controller). Among the wide variety of available components, the propulsion system is carefully selected to balance between price, power, and efficiency based on the specification of the FX 79 airframe. Folding propellers are used to avoid damage to the motor and mount in case of a hard landing. Dual 3 cell LiPo (Lithium Polymer) batteries in parallel with a total capacity of 10400mAh are used to power the propulsion system and other components of the drone.
Fail safe Systems
Return to launch function
The Pixhawk flight controller with Ardupilot firmware has a built in return to launch function in case of emergency. Home location is set to the location where the drone is turned on. Return to home is initiated automatically when the drone’s battery level is critical or if the connection between the receiver and the remote controller is lost.
Real time monitoring system
Real time monitoring of the drone is done by ground control station and live video feed back of the drone using FPV (first person view) Transmission. Telemetry data is transmitted to the ground control station using long range 433MHZ radio. The real time location, attitude, battery level, and speed are continuously monitored during manual and autonomous flights. For additional safety, a Fatshark FPV camera system is installed to the drone which provides live video feedback. After the initial prototyping, the FPV system can be removed from the drone to save power.
Parachute deployment
The landing of the drone is done by a parachute. In case of emergency, the parachute can be deployed manually using the remote controller. The remote controller is programmed to avoid deploying the parachute by accident by adding a safety switch to the deployment switch.
Imaging system
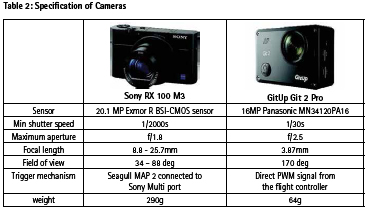
Selection of proper camera plays an important role in building a mapping drone. Ultimate data provided by drone for mapping purpose are the images so the quality of the images directly affects the quality of the map products. Several parameters are considered when choosing the camera for the drone. Which are the resolution, resolving power, sensor size, shutter speed, focusing compatibility, PWM triggering compatibility, weight, and price. Two camera models were selected for different applications.
1. Sony RX 100 M3 – For high resolution and high quality maps
2. GitUp Git 2 Pro – For medium resolution medium quality maps with increased coverage and rapid processing
Landing system
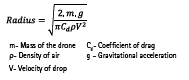
Landing of the drone is a well known issue in the fixed wing category and it’s a critical phase of each mission. Conventional manual landing requires large open space. Commercial survey grade drones use controlled deep stall landing with the help of advanced sensor integration such as range finders and optical flow sensors. For this drone, a simple yet effective parachute system is used for landing where the available landing space is limited. The front of the airframe is modified to open a hatch and parachute is placed on an elastic bed which throws the parachute out when the hatch is opened. The parachute can either be deployed by the flight controller automatically or manually using the remote controller.
The size of the parachute was calculated using the following equation. The velocity of the drop is set to 3ms-1.
Flight performance
The flight performance of the drone is initially tested with 10 flights for evaluating the stability, imaging system, parachute landing and to tune the parameters i.e. control surface trim, PID gains. Nine out of ten flights performed perfectly but single flight ended up with crash landing without any damage, due to an error in deploying the parachute.
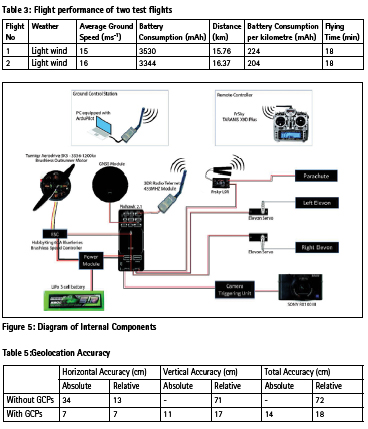
Two flights were performed to precisely test the power consumption, by using single 5200mAh LiPo battery. Power consumption is calculated after each flight by charging up the battery to its full capacity by precisely measuring the consumed electric charge. The analysis shows that the drone consumes an average of 214mAh battery capacity to fly 1km distance. Which means the drone can fly at 15ms-1 ideal speed for 50 minutes in single flight covering 45km distance with spare 10% of battery.
Mapping performance
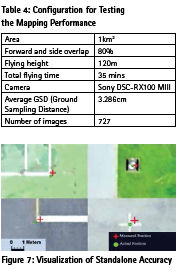
The drone’s performance in mapping is assessed by mapping a total area of 1km2 in Asian Institute of Technology, Thailand. Prior to the flight, ground control is established using RTK GNSS method to assess the geolocation accuracy of the maps. For the ground control, well distributed 10 ground control points and 15 checkpoints were established with 5cm accuracy. The flight planning was done using the Mission Planner software.
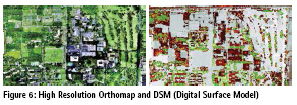
The images are post processed with the flight log to extract the location at the time of exposure. The geotagged images are photogrammetricaly processed into orthomap and DSM using the Pix4D software, resulting a high resolution (3.3 cm) orthomap and DSM. Two sets of maps were made during the process by using the ground control for georeferencing and without using the ground control but direct georeferencing only by the image geotags.
The absolute accuracy is assessed by comparing the map coordinates with the actual ground coordinates measured by survey grade RTK GNSS receiver. The relative accuracy is for the map measurements relative to a point on the map. The analysis shows that the custom made drone can make 2D maps to an accuracy of 34cm without the aid of a ground control.
Comparison
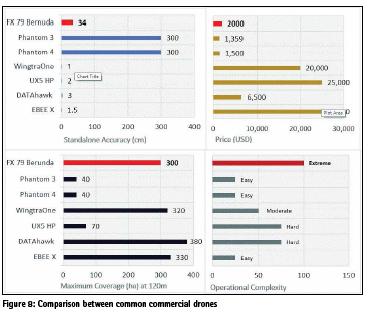
The drone’s performance in mapping is compared with phantom 3 & phantom 4 which are DJIs consumer grade drones and with Wingtra One, Trimble UX5, DATAhawk & eBee X which are popular survey grade drones. The most significant advantage of the custom-made drone over other commercial drones is the price. The total build including two cameras only cost 1989 USD for the hardware. Its 10 times cheaper than the average price of a survey grade drone. Also, the drone is capable of covering an area of 3ha with a single flight which ties up with the survey grade drones. The trade offs are the accuracy and operational complexity. The drone only uses SBUS aided GNSS positioning which brings the standalone horizontal accuracy of the products to 34cm. 3D accuracy further drops to 72cm which is less accurate than the survey grade drones. Also at the current stage, it is very difficult for others to understand how to operate the drone except for the people who built it, which makes the operational complexity, extreme.
Discussion
This study proves that it is possible to build a long-range mapping drone under 2000USD which can perform mapping to a planimetric accuracy of 34cm and sub meter in 3D. Further improvements can be made to upgrade the positioning system to RTK/ PPK capable receiver to increase the standalone mapping accuracy.
The power consumption can be reduced by fine tuning the internal parameters of the flight controller which requires a significant amount of flight data in multiple flights. When compared to the survey grade drones in the market, the custom-built FX- 79 “Berunda” is a very affordable drone solution for long range mapping where it matches with the accuracy requirements as the accuracy is always governed by the application.
Reference
Ardupilot Dev Team, 2016, Plane Home, Retrieved September 21, 2018, from http://ardupilot.org/plane/
PX4 Dev Team, 2018, Cube Flight controller, Retrieved September 21, 2018, from https://docs.px4.io/en/ flight_controller/pixhawk-2.html
Drone Deploy, 2018, Commercial Drone Industry Trends, Report Drone Deploy, San Francisco.
Madawalagama, S, 2016, Low Cost Aerial Mapping with Consumer-Grade Drones.











 (1 votes, average: 3.00 out of 5)
(1 votes, average: 3.00 out of 5)




Leave your response!