| Surveying | |
Lidar bathymetry from UAVs
The design of a bathymetric lidar depth finder is presented and results from a flight experiment carried out at the pre-alpine Pielach River (Austria) are discussed and compared to UAV-borne lidar scans and terrestrial survey |
 |
|
 |
|
 |
|
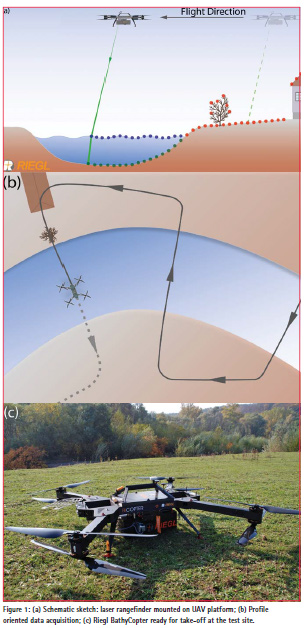
We present a novel lidar sensor allowing to measure shallow water depths from an Unmanned Aerial Vehicle (UAV) in sub-decimeter accuracy. The system consists of laser rangefinder (λ=532 nm) for measuring distances to both the water surface and bottom and a navigation device consisting of a Global Navigation Satellite System (GNSS) receiver and an Inertial Measurement Unit (IMU). The sensor is mounted on an octocopter UAV platform and measures water body profiles with an along-track point spacing <10 cm. We report about a flight experiment carried out at the pre-alpine Pielach River (Austria) and discuss the results compared to UAVborne lidar scans and a terrestrial survey.
Introduction
Measuring the depth of shallow water bodies from the air with pulsed, scanning lasers, commonly referred to as Airborne Laser Bathymetry (ALB), dates back to the 1960ies when the laser itself was invented (Guenther et al, 2000). Among the potential applications are underwater object detection, coastal and inland water mapping, monitoring of morpho-dynamics after flood or storm events, aquatic habitat modelling, underwater archeology and the like (Mandlburger et al, 2015a; Doneus et al, 2015). Due to their weight the operation of traditional ALB sensors was restricted to manned airborne platforms so far. Advances in sensor technology lead to miniaturization of light detection and ranging (lidar) systems. At the same time progress in UAV technology is nowadays enabling higher payloads and longer flight endurances. For these reasons UAV-based mapping is no longer restricted to passive image sensors (Colomina and Molina, 2014) but integrations of lidar sensors on UAV platforms for mapping topography and vegetation are rapidly developing today (Starek and Jung, 2015). In this paper we present the sensor concept of the first commercial UAV–borne bathymetric laser rangefinder (BathyCopter) manufactured by Riegl Laser Measurement Systems. We furthermore report about the results of a flight experiment at the Pielach River in Lower Austria. The captured river profiles are compared with terrestrial measurements carried out with a Leica TPS 1200 total station.
Sensor concept
The BathyCopter sensor system comprises a laser rangefinder (BDF-1), a navigation device consisting of an Inertial Measurement Unit (IMU) and a Global Navigation Satellite System (GNSS) receiver mounted on a UAV airborne platform (cf. Figure 1c). The transmitter and receiver axis of the laser range finder are coaxial (Riegl, 2016). The transmitter is a short-pulsed laser operating at 532 nm with a pulse repetition rate of 4 kHz and a pulse energy of about 3 μJ. The emitted pulse is shaped as a circular ring (d=7 cm ) which is focussed by the transmitter optics to a footprint diameter on the ground of approx. 2 cm at the nominal measurement range of 15- 20 m. The echo signal is digitized at the receiver and full waveform information is stored for every laser shot for the entire range gate. This enables flexible offline echo detection either on a per pulse basis or by averaging an adjustable number of pulses. The laser beam axis is tilted by 15° off-nadir for receiving echoes from both the water surface and the river bottom for each laser pulse (cf. Figure 1a). Knowledge of the exact position of the airwater- interface is a prerequisite for proper range and refraction correction of the raw measurements as no areal water surface model can be calculated from measuring points arranged in linear profiles (cf. Figure 1b). A constant off-nadir direction of the optical axis is ensured by coupling the IMU with a motor-driven laser beam deflection mirror to compensate varying pitch angles during the UAV flight.
The laser rangefinder is tightly coupled to the navigation device (GNSS receiver, IMU). Together with the GNSS antenna mounted on top of the UAV, the navigation system determines the flight trajectory (sensor position and attitude) with high accuracy and resolution. Hence, origin and direction information can be assigned to every single measurement of the laser rangefinder, and 3D-coordinates in a geo-referenced spatial reference system (WGS84) are obtained by combining trajectory and range data. The sensor system is mounted on a Riegl RiCOPTER platform. The RiCOPTER is an X8 octocopter UAV with a maximum take-off weight of 25 kg and a flight endurance of 30 minutes. It is electrically powered, provides redundant flight control hardware, and can perform autonomous waypoint navigation.
Flight experiment
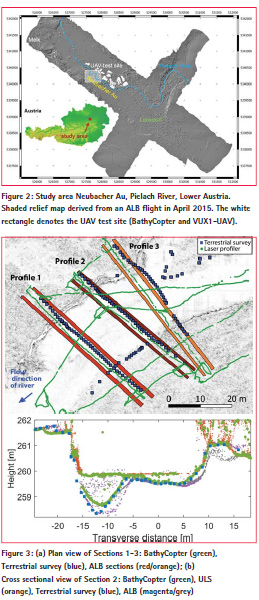
The study area Neubacher Au (48°12’50” N, 15°22’30” E; WGS 84, cf. Figure 2) is located at the lower course of the prealpine Pielach River, a medium-sized right side tributary of the Danube. The study site is part of the Natura2000 area Niederösterreichische Alpenvorlandflüsse (area code: AT1219000). Bed-load sediments are dominated by coarse gravel (2–6.3 cm) within the active channel and bars. Cohesive sediments in areas of bank erosion lead to steep bank slopes, which, together with the dense understory vegetation in the riparian forest issues challenges for terrestrial surveys.
On October 28, 2015, 12 river cross sections were captured with the BathyCopter flying at an altitude of 15- 20 m a.g.l. The flight was conducted under good hydrologic conditions (clear water, low discharge) and moderate weather (bright sky, choppy wind). To ensure cm-precision of the directly georeferenced laser points, thorough initialization of the navigation device was performed on the ground and after takeoff following a recommended procedure of the IMU manufacturer (Applanix). The positions of the cross sections were defined before take-off based on orthoimagery and depth maps derived from a previous ALB mission. The waypoints were uploaded to the flight control unit and data capturing was finally conducted by autonomous flight. In a second flight following the bathymetric survey, the entire study area including the alluvial forest was captured independently with the RIEGL VUX1-UAV topographic laser scanner with the following mission parameters: flying altitude: 50 m a.g.l., flight velocity: 8 m/s, measurement rate: 500 kHz. This areal survey served for co-registration and quality assessment of the laser profiler data in the riparian area. An independent terrestrial survey in cm precision was conducted simultaneously using Leica equipment (1200 GPS, TPS 1200 total station) to evaluate the quality of the bathymetry. Additional areal bathymetry data from an ALB flight in April 2015 (Mandlburger et al, 2015c) captured from 600 m a.g.l. with the RIEGL VQ-880-G topo-bathymetric laser scanner were available and served as basis for the quantification of seasonal changes due to fluvial erosion.
Results and discussions
The flight paths of 3 selected cross sections, the corresponding terrestrial survey check points, and the ALB profiles enveloping the domain of the respective cross sections are displayed in Figure 3a. For Section 2 the BathyCopter points (green) are plotted in Figure 3b together with the terrestrial survey points (blue), the points from the topographic UAV-borne laser scanning (ULS) with the VUX1- UAV system (orange), and the ALB cross sections derived from the April 2015 dataset (magenta, grey). Visual inspection of the laser profiler data and the check points shows good coincidence in the shallow part on the right side of Section 2 and systematic deviations in the pool area on the left side of the profile. However, both the laser profiler and the check points are consistent when seen individually. Actually, the observed difference can rather be attributed to the small-scale variability of the river bed and to the fact that the laser profiler and the check points are not perfectly aligned in the ground plan (cf. planimetric deviation in Figure 3a). Although, as pointed out earlier, the laser profiler data acquisition was carried out autonomously based on waypoints, and the flight control system ensures minimum deviations from the planned flight path by continuously correcting the sensor positions, still the attitude (roll component) of the sensor is influenced by turbulences due to varying wind conditions, resulting in lateral displacements of the recorded echoes on the water surface and river bed. On the other hand it was also difficult to exactly position the check points along the planned axis when wading the river bed during the terrestrial survey. The derived ALB sections clearly show (i) the seasonal change of the gravel bed due to fluvial erosion and, even more importantly, (ii) the high variability of the river bed in flow direction. Concerning the water surface returns, Figure 3b reveals that in most cases the bathymetric depth finder delivers echoes from both the water surface and the river bottom. Only in the shallow littoral area with water depths less than 30 cm (i.e. distance corresponding to the pulse length) only one echo from the bottom but no water surface return is obtained. In the resulting return waveform the two distinct targets cannot be separated as the strong return signal from the bright river bed gravel is much more pronounced than the relatively weak water surface reflection.
A quantitative assessment of the BathyCopter accuracy was possible by comparing the 3D points of the water surface and the riparian (dry) area with the data from the ULS system and by comparing the river bed points with the terrestrial survey points. Comparison of the bare earth points showed a mean deviation of 3 mm and a standard deviation of 2.9 cm. This confirms a good accuracy of both the range estimation and the trajectory. Thorough analysis of the deviations revealed systematic small-term fluctuations of the navigation solution in the order of 3 cm, thus, restricting the achievable accuracy to a few cm as the laser profiler system entirely relies on direct georeferencing. The water surface points showed a clear positive bias (median: 4.5cm) and a standard deviation of 6 cm. The bias can be attributed to the slight penetration of the green laser signal into the top layer of the water column (Guenther et al, 2000). The order of magnitude is in line with the findings in Mandlburger et al. (2013). For utmost accuracy requirements this systematic offset needs to be considered for the range and refraction correction of the river bed returns. As for the higher standard deviation of 6 cm, compared to 3 cm over land, the shortterm variability of the water surface has to be taken into account. Whereas previous studies have shown that the in-stationarity of the water surface can be neglected for ALB inland water applications due to the relatively large laser footprint of >50 cm, short-term water surface fluctuations (i.e. waves) need to be considered for UAV-based laser bathymetry as the footprint is much smaller (3.5 cm). Simultaneous capturing of both the water surface and river bed, as aimed by the presented sensor designed, is therefore very important.
The river bed point comparison yielded a bias of 7 cm and a standard deviations of 13 cm. The main reason for the larger deviations is that the height differences are not measured at the coinciding spots but by comparing the laser profiler height with the height of the nearest check point. The positive bias is mainly provoked by the left part of Profile 2 where the water depth at the measuring position of the laser profiler is clearly smaller than at the corresponding position of the check points. When restricting the nominal-actual bathymetry comparison to river bed points with a distance to the nearest check point of less than 1 m the mean deviation drops to 4 cm with a standard deviation of 6 cm. The latter measure can be regarded as a reasonable estimate of the overall accuracy of BathyCopter river bed points.
The BathyCopter was designed as a comprehensive topo-bathymetric sensor, i.e. an instrument for capturing profiles of the bathymetry and the riparian area with a single instrument and in a single mission. The main application for such data is 1D hydrodynamic-numerical (HN) modelling. Especially for large scale flood simulations 1D models are still commonplace. The multi-target capabilities of the sensor resulting from recording and processing the full echo waveform allow capturing of vegetation, bare earth, water surface and river bed data. From these data not only the ground surface can be extracted but the overbank roughness can also be characterized and used in the hydraulic model (e.g. via calculation of Manning n-values derived from vegetation height and density). Furthermore, the high alongtrack point density carries the potential of estimating the grain structure (i.e. pebble sizes) down to the sub-cm level. For the presented quality assessment the waveforms of 100 laser pulses were averaged in post-processing to increase the signal-to-noise ratio. This resulted in a net measurement rate of 40 Hz and a corresponding spatial resolution of about 10 cm. The respective point cloud is smooth and still provides enough geometric details for HN modelling. In contrast, averaging only 10 echo waveforms leads to a point distance of 1 cm and the shape of the resulting dense point array suggests that it is feasible to estimate roughness on the grain size scale together with capturing bathymetry in a single campaign.
Concluding remarks
The Riegl BathyCopter is a novel UAV-borne topo-bathymetric laser profiler consisting of a laser rangefinder operating at λ=532 nm, a navigation unit (GNSS, IMU), a flight control system, and optional cameras tightly connected to an octocopter UAV carrier platform. The 8° off-nadir tilt of the laser beam provides optimal conditions for receiving echoes from both the water surface and the river bed, which could be confirmed for 97% of the laser pulses in areas with a water depth greater than 30 cm. The overall accuracy of the captured topographic and bathymetric laser profiler points strongly depends on the sensor positioning and orientation accuracy (GNSS, IMU) and was calculated to 3-5 cm compared to as reference for bare earth areas. The bathymetric accuracy is slightly lower but still in the sub-dm range. The study showed that the sensor system would benefit from a stabilization of the flying platform. While automatic correction of the pitch movements is already realized in the latest sensor generation, roll movements of the platform lead to a lateral deviation of the laser points from the planned axis.
Whereas the system design as a laser profiler exhibits drawbacks compared to scanning systems concerning (i) system calibration due to a lack of redundant strip overlap area and (ii) refraction correction perpendicular to the flight path, especially the small laser footprint of 3.5 cm enables new applications especially as the spatial resolution within a profile is much higher compared to traditional airborne topobathymetric scanning. The study showed that capturing linear profiles of the riparian and submerged area is feasible in a single mission and makes the resulting data the ideal input for 1D HN models. Beyond that, a point spacing of 1 cm on the river bottom (depth: approx. 2.5 m) could be obtained and suggests that fine scale roughness estimation of the bottom is feasible with this sensor, but further experiments are needed to confirm this.
References
Colomina, I., and Molina, P., 2014. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS Journal of Photogrammetry and Remote Sensing, 92, 79-97.
Doneus, M., Miholjek, I., Mandlburger, G., Doneus, N., Verhoeven, G., Briese, C., Pregesbauer, M., 2015. Airborne laser bathymetry for documentation of submerged archaeological sites in shallow water. In: ISPRS Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XL-5/W5, 99- 107.
Guenther, G.C., Cunningham, A.G., Laroque, P.E., Reid, D.J., 2000. Meeting the accuracy challenge in airborne Lidar bathymetry. In: Proceedings of the 20th EARSeL Symposium: Workshop on Lidar Remote Sensing of Land and Sea, Dresden, Germany.
Mandlburger, G., Pfennigbauer, M., Pfeifer, N., 2013. Analyzing near water surface penetration in laser bathymetry – A case study at the River Pielach. In: ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, II-5(W2), 175–180.
Mandlburger, G., Hauer, C., Wieser, M., Pfeifer, N., 2015a. Topo-Bathymetric LiDAR for Monitoring River Morphodynamics and Instream Habitats – A Case Study at the Pielach River. Remote Sensing, 7(5), 6160–6195.
Mandlburger, G., Hollaus, M., Glira, P., Wieser, M., Milenkovic, M., Riegl, U., Pfennigbauer, M., 2015b. First examples from the RIEGL VUXSYS for forestry applications. In: Proceedings of SilviLaser 2015, La Grande Motte, France, 105-107.
Mandlburger, G., Pfennigbauer, M., Riegl, U., Haring, A., Wieser, M., Glira, P., Winiwarter, L., 2015c. Complementing airborne laser bathymetry with UAVbased lidar for capturing alluvial landscapes. In: SPIE Remote Sensing 2015, Toulouse, France, Vol. 9637.
RIEGL, 2016: BDF-1 data sheet. http://www.riegl.com/uploads/ tx_pxpriegldownloads/DataSheet_ BDF-1_2016-10-04_01.pdf.
Starek, M. and Jung, J., 2015. Lidar’s Next GeospatialFrontier – The state of lidar For UAS applications. GIM International, 29 (2015), UAS Special Edition, 25-27











 (2 votes, average: 3.00 out of 5)
(2 votes, average: 3.00 out of 5)




Leave your response!