| Applications | |
ACCSEAS: The Innovative North Sea e-navigation Demonstration
The project shows that there is much more work to be done, but the principle and the advantages of using e-Navigation is made clear, and that Europe is leading the way for harmonised information and navigation systems onboard vessels |
 |
|
 |
|
 |
|
The ACCessibility for Shipping, Efficiency Advantages and Sustainability (ACCSEAS) project aims to identify issues which obstruct maritime access to the North Sea Region (NSR), identify potential solutions, prototype and demonstrate these successful solutions using the International Maritime Organisation’s (IMO) e-Navigation concept in a test-bed. The project developed ‘proof-of-concept’ tests which led to a proposed sustainability plan for future e-Navigation provision in the NSR and will look to inform the e-Navigation initiative globally. The entire process of the implementation of prototype solutions in the e-Navigation test-bed was supported by training and simulation, so that the test-bed had aspects of both real-world and simulated implementation. The project was part funded by the European Regional Development Fund through the INTERREG IVB programme.
The ACCSEAS Project ran from April 2012 to February 2015, with budget of over €5M. The partnership consisted of: General Lighthouse Authorities, United Kingdom; Chalmers University of Technology, Sweden; Danish Maritime Authority, Denmark; Federal Waterways & Shipping Administration, Germany; Rijkwaterstaat, Ministery for Infrastructuur and the Environment, Netherlands; Swedish Maritime Administration, Sweden; Norwegian Coastal Administration, Norway; SSPA Sweden AB, Sweden; Flensburg University of Applied Science, Germany; Maritiem Instituut Willem Barentsz, Netherlands; World Maritime University, Sweden.
This paper will provide an overview of the project’s achievements, starting with the detail of the requirements gathered, through the logic used to identify potential e-Navigation services that can be considered for demonstration, to the implementation and demonstration of the solutions. The potential solutions will consider the many different services that can be provided by the many different providers as part of their e-Navigation Maritime Service Portfolios (MSPs), which will include a review of services offered today as well as potential services that can be introduced. These new services include the potential for route guidance information, improved information exchange as well as enhanced position, navigation and timing information from multiple sources.
Analysis of the region
The NSR faces a number of problems in the near future, with increased density of shipping, reduced sea space and manoeuvrability as a result of the growth in offshore installations. This could lead to traffic pinch-points at approaches to ports and potentially increased risks of collision and grounding.
There are many sources of data that provide a picture of competing demands on sea space in the region in the 2020+ timeframe. A view such as the planned wind farms of the UK, Denmark and Germany overlaid on the vessel traffic density shown in Fig. 1 provides a simple introduction to the nature of growth in offshore renewable energy installations.
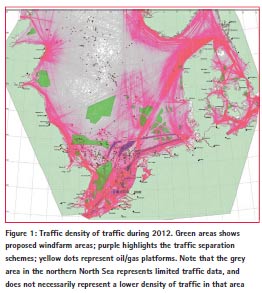
It is immediately apparent that large areas of the North Sea could be dedicated to the use of renewable energy, thereby reducing the sea space for ships to navigate and manoeuvre. When taken together with the trend in the growth in shipping – both in numbers and size of vessels – it is clear that higher density of ships may be forced to navigate in more restricted sea areas. A typical container ship size enables it to transport around 4,000 to 10.000 TEU (Twenty Foot Equivalent unit based on a single 20ft container). The Marco Polo vessel started operation in November 2012 with a capacity of 16,020 TEU; it is 396 m long, 54 m wide, with a draft of 16 m. Even larger vessels up to 20,000 TEU or more are currently being considered [1]. Higher density of shipping and larger vessels in the increasingly confined sea space of the North Sea could correlate with greater risk of grounding and collision, hence impacting the safety and efficiency of access to the region’s ports. The e-Navigation services being prototyped in ACCSEAS are, among other instruments, intended to mitigate this increase in risk.
Based on expectations about the impact of areas of open sea being allocated for energy extraction (such as wind farms), ACCSEAS’ research suggests that the North Sea Region’s navigable space will be reduced [2]. The research indicates that navigable space allocated to wind farms could increase by up to 5240% within just a few years, from the current c.440km² up to c.23,500km². This would constitute c.5.5% of all navigable space in the region, with a further 860km² taken up by exclusion zones around oil and gas platforms. Crucially, the precise location of many planned and proposed wind farm sites means that they could have a significant impact on manoeuvrability within key shipping lanes in the North Sea Region. The size and location of such sites, coupled with projected increases in shipping traffic and vessel size, may pose serious safety and efficiency concerns.
The project’s Geographic Information System (GIS) enables officially recognised transnational data to be collected to determine a picture of the region as it may appear in the timescales of 2020+. Based on this data, the project can assess maritime traffic trends and the issues that obstruct available safe access. It is important that the picture of the ‘North Sea Region tomorrow’ generated by ACCSEAS is based on officially recognised sources of data. So great care has been taken to seek out these sources and maintain their traceability within the ACCSEAS GIS to the original data. The combination of these data sources overlaid on each other produces the very complicated picture of the North Sea Region in 2020+ that is shown in Figure 2.
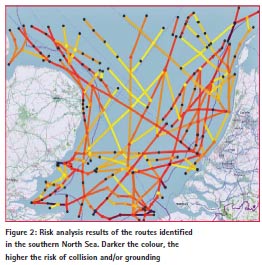
Using the latest AIS data, ACCSEAS has been able to apply the IALA Waterways Risk Assessment Program (IWRAP) to the identified routes to determine the risk of collision and grounding in the region. The results, in Fig. 2, show that there are certain areas that are of higher risk than others, in particular in the southern North Sea where it is predicted that there will be 4.2 accidents per year in the region shown, 25% of which are in the darker area at the southern-most point of the figure.
Not all the designated areas under consideration for offshore renewable energy installations will necessarily be developed in the 2020+ timescale. It is also unlikely that in practice wind turbines will be built within Traffic Separation Schemes, but the picture demonstrates the need for the NSR maritime community to be adequately represented in future transnational marine spatial planning.
It is clear that the 2020+ picture is particularly congested with conflicting and competing uses for sea space, especially in the southern part of the North Sea. The need for transnational coordination of sea space management and marine spatial planning is evident. It is reassuring to know that the European Union has recognised the importance of this, and that one of the North Sea Commission’s objectives is maritime spatial planning [3].
e-navigation services
The services that could be included in the MSPs are a major outcome of the ACCSEAS project. In this paper, we shall focus on a selection of those services, and how they could improve the efficiency and accessibility of shipping in spite of the challenges raised above.
No-go Area
The “No-go” area service is a means for the mariner to determine, in a simplified way, the areas that they should avoid due to insufficient clearance under the keel of their vessel. The service takes into account detailed bathymetry data, and using the current tidal conditions together with the vessel’s dynamics, it is able to determine, on the fly, the location the vessel should avoid. The project demonstrated the service in the Humber Estuary where shifting sands pose a constant grounding risk to vessels approaching the ports along the estuary, and in simulator to capture the user experience for training purposes. Whilst there are technological challenges to overcome, a key element to the success of the service will be the portrayal of the information. A polygon is created on the screen to tell the mariner that this is an area that has a high grounding risk if the vessel was to enter that area. With this information, the spatial awareness of the mariner is increased considerably, particularly in tighter channels, and this was reflected in the user feedback from the participants of the trial and demonstrations
Maritime Safety Information/ Notices to Mariners (Temporary and Permanent) Service
The most important information to vessels is that related to safety, including Maritime Safety Information (MSI), Notices to Mariners (NM) and chart corrections. These three information types, together with nautical charts and position updates form the basis for safe navigation of ships.
Chart corrections, and the way they are promulgated, have evolved tremendously over the past 10 years. Chart corrections are geo-referenced and displayable by nature. MSI and NM, on the other hand, are often geo-referenced but not necessarily displayable with internationally standardised text and symbols.
The main differences between MSI and NM today are the method of promulgation and the speed of handling and thereby quality assurance. The contents of the two message types are, however, very similar. MSI is today promulgated in text or voice via SafetyNET, NAVTEX, coast radio stations and is in some countries accessible on the Internet. NM’s are promulgated on paper weekly, fortnightly or monthly and are often accessible on the internet in PDF format. The handling of data and information provided through the above methods are time consuming for the mariner, increases their workload, and there is a risk of human error causing important information to be lost or misinterpreted.
Maritime Information messages, MSI and NM, may in the future be broadcast or transmitted via any available communication method, e.g. satellite, GSM (mobile), VHF-data, AIS, etc. in addition to traditional systems such as NAVTEX and radio broadcasts. Maritime Information Messages should be received and displayed on navigation displays automatically for correct and immediate assessment by the navigator.
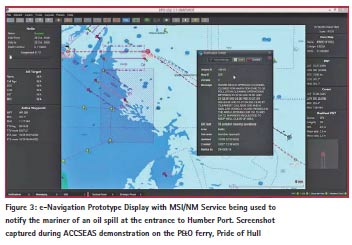
It is important that ALL vessels still receive ALL Maritime Information messages. To avoid the often discussed overload of information, it should be possible for the Mariner to filter the Maritime Information messages so only messages relevant to the specific vessel’s navigation is displayed, e.g. by distance from own vessel and route. Important information should be shown on a navigation display without further action by the navigator, for example, as shown in Figure 3.
Vessel Operations Co-ordination Tool
The Vessel Operations Co-ordination Tool (VOCT) builds on promising results from tests conducted during a previous EU project, EfficienSea. It was recognised that communication, timely and correct, between parties during a Search and Rescue (SAR) operation is of utmost importance. Today information is primarily exchanged via different ways of voice communication which is both time consuming and contains a risk of misunderstandings. The VOCT is a service to optimise communication and improve situation awareness during SAR, counter pollution and similar operations. Search areas, search patterns, datum, drift calculations, areas searched and other important information is exchanged electronically between parties and is presented graphically on vessels’ and coordinators’ displays. Inclusion of a calculation module for search areas and patterns into the Ship e-Navigation Prototype Display (EPD) and Shore-EPD was investigated, and good response has been received by users in trials carried out in ACCSEAS.
Other Services
The ACCSEAS project has investigated other services, such as augmented reality, Inter-VTS Exchange Format, Route Topology Model, dynamic ship movement prediction, route exchange/ suggestion and automated FAL reporting. More details of these services can be found in [2] or on the ACCSEAS project website (www.accseas.eu).
Resilient positioning, navigation and timing
High precision positioning in the maritime domain is now the norm since the introduction of Global Navigation Satellite Systems (GNSS). Unfortunately, it is well known that as low power, satellite-based systems, GNSS are vulnerable to interference (both naturally occurring and manmade); hence, the development of an alternative backup system is recommended. A variety of technological solutions to this backup requirement are possible; in the radio frequency (RF) domain we have the socalled “Signals of OPportunity” (SoOP) approach. This report considers several SoOP solutions to provide a Ranging Mode (R Mode) Position Navigation and Timing (PNT) alternative to GNSS.
Absolute Radar Positioning
ACCSEAS investigated the use of absolute Radar positioning using modified radar and Racon equipment. A trial carried out off the East Coast of the UK demonstrated the feasibility of such a system as an alternative non-GNSS means for determining the ship’s position [4].
The trials took place over four days, which were used for ‘static’ and ‘dynamic’ tests. In the static tests, the vessel held station at a number of points, at different distances from the Racon locations, and the dynamic tests involved sailing parallel with the coast through the trials area. The data processing associated with the radar used both range and bearing from the racons, to calculate position, combined with the latitude and longitude encoded using FSK modulation on the dash of the Morse character of the Racons. The appearance of the Racon paints on the experimental radar was similar to that on the vessel’s conventional radar. The first dash of the Racon response showed striations from the modulation, but was clearly distinguishable.
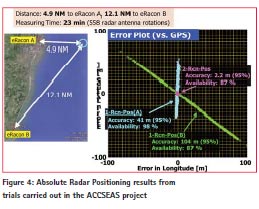
The maximum ranges at which the Racons could be seen was about 20 M, however, responses at these ranges were sporadic and inconsistent. The maximum ranges at which consistent responses were received varied between 8 and 12 M depending on location and time. Therefore, a usable range of 10 M is probably to be expected. The accuracies also varied considerably, depending on the number of Racons being received, their geometry relative to the vessel and the consistency of response. During static tests ‘ideal’ locations were found at which both Racons were almost continuously available, with ranges of less than 10 M and the geometry was good – the two Lines of Position (LOP) crossing at right angles. Combined position accuracies at these points were 5-10 m. When geometry was poor or only one Racon could be received, accuracy was in the region of 50- 100 m. The plots shown in Figure 7 indicate typical performance, with single Racon accuracy of 40 m within 5 M, 100 m at 12 M, but with two Racons accuracy of 2 m was achieved. Whilst the availability of the single Racon fix at under 5 M was 98%, the availability of the two-Racon fix was dictated by that of the more distant Racon at 87%. The results of the trial were encouraging, although more work is needed to fully understand the capabilities of the system.
R-Mode Radiobeacon Differential GNSS
Following a comprehensive study of R-Mode options for maritime navigation [5], the ACCSEAS project embarked on the world’s first R-Mode test bed using MF DGNSS transmissions. The trial was carried out in early 2015, which limited the scope of the tests in the concluding ACCSEAS project. However, even a limited test can serve as a proof-of-concept and provide a basis for further work.
The installation of the system components enables the following tests:
• usability of standard MF transmitter and antenna setup for R-Mode operation
• proof of R-Mode concept using MF transmissions from IALA radio beacons
• co-existence of R-Mode signals and DGPS-transmission within one channel
• achievable accuracy figures (range and timing) in the test area
• mutual influence of R-Mode and DGNSS signal
Test Bed in Ijmuiden
An R-Mode transmitter was installed at the location of Ijmuiden, Netherlands which provides a usable range for R-Mode tests of about 100 km. For the transmission of the R-Mode signals, a typical MF transmitter and antenna was used. Based on the 3 different solutions evaluated in the feasibility study, the R-Mode transmitter provides 3 signals:
• One standard MSK signal for the normal data channel
• Two CW signals for navigation purposes
An R-Mode modulator was developed which enable the transmission of standard RTCM messages used for the DGNSS service and two independent CW signals with adjustable frequency and output level. Furthermore, the transmission of the ranging signals used a reference timing from a rubidium clock.
The R-Mode receiver needs to have the capability of measuring the pseudorange from the R-Mode transmitter, as well as being able to demodulate the MSK signal and decode the RTCM messages. This data on pseudoranges were logged along with position and time for later analysis. For the R-Mode test bed, a prototype R-Mode receiver was developed consisting of an H-field antenna, a band filter with attenuator and a PC with ADC board and a MATLAB software. The receiver together with a rubidium clock was installed on a lighthouse tower in Noordwijk. The distance to Ijmuiden is about 25 km.
After the setup of the R-Mode equipment in Ijmuiden and Noordwijk, a measurement campaign was performed over two days. The recorded data was analysed with respect to signal to noise ratio and the accuracy of the range accuracy phase measured from the phase determination of the two CW signals and the beat frequency of both signals to solve the ambiguity. Fig. 5 shows the measured range errors in metres for CW1 and CW2 over the time, and they are typically better than 10m, which is a great result.
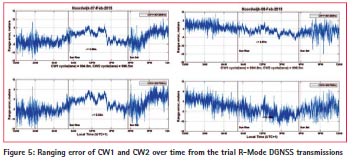
The effects of the own skywave at night are clear to see, with the error fluctuating more than during the day. Nevertheless, the early results from this trial shows that, in principle, the modified DGNSS transmissions can be used to provide a source of resilience to maritime PNT. However, much more work and research is needed before a viable system is deemed possible. The current trial includes only one station, and therefore, a position fix is not yet possible. However, now that the principle is at least tested, the next phase will look into bringing more stations into the trial and produce the world’s first DNGSS-based positioning system.
Conclusions
The ACCSEAS project started by looking at the challenges to maritime accessibility in the North Sea Region. In particular, the impact of increasing traffic density and larger ships in reduced sea-space was considered and explored. As a result of this work, the solutions detailed earlier in this report were proposed in the ACCSEAS Baseline and Priorities Report, first published end of 2013. Now in its third edition, it covers the IMO’s work on the Sustainable Maritime Transport System and the Strategic Implementation Plan (SIP) for the e-Navigation concept that underpins all the solutions in ACCSEAS [2].
Improved Spatial Awareness
Improving the spatial awareness of the mariner and shore-based authorities will allow those users to get a better understanding of what’s happening around them. The Baseline and Priorities Report highlighted the potential issue of increased traffic in tighter shipping lanes created by windfarms, particularly in the southern North Sea. There will be an increased reliance on ship systems to navigate through these areas to ensure that the risk of collision and grounding remain low.
Through demonstrating e-Navigation services such as the Tactical Route Exchange, No-go Areas and the Augmented Reality Head-up Display, ACCSEAS has shown that solutions can be developed that will allow users either to receive information they cannot yet get or is more difficult to obtain. This information will enable the mariner, and shore-based authorities, to understand their immediate and near future environment in a more clear and intuitive way. The demonstrations have shown that users are enthusiastic about the improved view of the environment that the ACCSEAS solutions provide.
By improving the spatial awareness, the users of the Region will gain a better understanding of how to traverse the Region with more confidence, efficiency and safety. This can only serve to gradually increase accessibility in the North Sea Region.
Improved Information Integrity
Information integrity is crucial in informing all uses of the situation in the maritime space. It underpins the acceptance and ultimate success of e-Navigation as an emerging driver for improved safety and efficiency. It is therefore unsurprising that a number of the solutions demonstrated in ACCSEAS have the aim of ensuring that the information presented to both the mariner and shore-based authorities is accurate and delivered in a timely manner.
Good examples of such services are Resilient PNT (improved integrity of positioning and navigation information), MSI/NM (improved and more reliable maritime safety information delivery), Vessel Operations Co-ordination Tool (faster and more reliable delivery of search and rescue information) and Inter- VTS Exchange Format (improved shorebased visualisation of the sea-space).
The impact that improved information integrity has on accessibility is very clear. By ensuring that the mariner and shorebased authorities get reliable information, the decision making can be more certain and less likely to cause collision and grounding. Reliance on unreliable information, whether deliberate or not, can only cause an increase in the risk to the vessels and the environment. The solutions, demonstrated in ACCSEAS to real users of the North Sea Region, has the real potential to minimise the informational errors and increase confidence, safety and efficiency in the North Sea Region.
Impact on Training
The ACCSEAS project has demonstrated solutions that will have an impact on accessibility to the North Sea Region and its ports. The solutions would be of limited value if the users were not suitably trained on the using the services to maximum benefit. The Training Needs Analysis and the Use of Simulators in e-Navigation Training and Demonstrations Reports [6] highlight the need for robust training of users in the new technology and its application in navigating the seas. It is here that the training and research institutes play a critical role in covering the human factor of e-Navigation services and solutions.
Without this, the solutions developed in the ACCSEAS project will not achieve the intended outcome of improving accessibility in the North Sea Region, and even has the possibility of causing collisions or grounding due to misunderstanding or too little training on the systems. As e-Navigation solutions develop, including the ones demonstrated in ACCSEAS, it is imperative that training and the human factor is a key aspect at all stages of implementation to ensure that maximum benefit, including improved maritime accessibility, is realised.
ACCSEAS has gone a long way to investigate the human factor of e-Navigation technology, and has proposed further work to ensure that as the concept evolves, the training evolves alongside it. This will give e-Navigation the best opportunity to provide the maritime users of the North Sea Region, and beyond, much needed tools to tackle the challenges of the future.
Further information
ACCSEAS has a wealth of information about the services and solutions it has developed on its website, www.accseas. eu. All the reports and videos of the demonstrations are available, as are the conference reports and presentations. Readers are encouraged to look at these resources for more details on the project and its achievements.
References
[1] J. Porter and N. Lowry, “Scorpio sets sights on 20,000 teu titans,” Lloyd’s List Containers, p. 1, 7 August 2014.
[2] ACCSEAS, “ACCSEAS Baseline and Priorities Report,” 2013. [Online]. Available: http://www.accseas.eu/.
[3] North Sea Commission, “North Sea Commission Strategy – Contributing to the Europe 2020,” 2013. [Online]. Available: http:// www.northseacommission.info/.
[4] N. Ward, J. Safar, A. Grant, P. Mueller and T. Kojima, “Absolute Radar Positioning,” in European Navigation Confernece 2014, Rotterdam, 2014.
[5] ACCSEAS, “R-Mode Feasibility Study,” 2014. [Online]. Available: http://www.accseas.eu/publications/ r-mode-feasibility-study/.
[6] ACCSEAS, “Use of Simulators in e-Navigation Traning and Demonstrations Report,” 2015. [Online]. Available: http://www. accseas.eu/publications/use-ofsimulators- in-e-navigation-trainingand- demonstrations-report/.











 (5 votes, average: 4.20 out of 5)
(5 votes, average: 4.20 out of 5)




Leave your response!