
| GNSS | |
GNSS Constellation Specific Monthly Analysis Summary: March 2024
The analysis performed in this report is solely his work and own opinion. State Program: U.S.A (G); EU (E); China (C) “Only MEO- SECM satellites”; Russia (R); Japan (J); India (I) |
 |
|
Introduction
The article is a continuation of monthly performance analysis of the GNSS constellation. In this month’s issue, there is an additional monitoring of the satellite Timing Group Delay (TGD)/Broadcast Group Delay (BGD) parameters. The regular analysis of Earth Rotation Parameters (ERPs) and satellite attitude dynamics is omitted in this month’s issue and will be covered again in coming months.
Analyzed Parameters for March, 2024
(Dhital et. al, 2024) ) provides a brief overview of the necessity and applicability of monitoring the satellite clock and orbit parameters..
a. Satellite Broadcast Accuracy, measured in terms of Signal-In- Space Range Error (SISRE) (Montenbruck et. al, 2010). Due to the data latency of 2 weeks for precise satellite clocks and orbits, at the time of analysis for February, only 01- 18 February, 2024 time frame was used. The remaining days of February are also covered in this month’s overall statistics.
b. SISRE-Orbit ( only orbit impact on the range error), SISRE (both orbit and clock impact), and SISRE-PPP (as seen by the users of carrier phase signals, where the ambiguities absorb the unmodelled biases related to satellite clock and orbit estimations. Satellite specific clock bias is removed) (Hauschlid et.al, 2020)
c. Clock Discontinuity: The jump in the satellite clock offset between two consecutive batches of data uploads from the ground mission segment. It is indicative of the quality of the satellite atomic clock and associated clock model.
d. URA: User Range Accuracy as an indicator of the confidence on the accuracy of satellite ephemeris. It is mostly used in the integrity computation of RAIM.
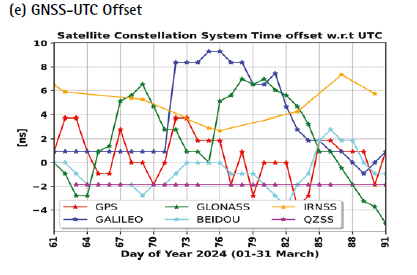
e. GNSS-UTC offset: It shows stability of the timekeeping of each constellation w.r.t the UTC
f. Satellite Hardware Delay (TGD/BGD): The hardware delays originating from the analog and digital parts of the satellite’s transmission. Mostly, the time difference between the transmitted RF signal,measured at the transmitting antenna, and the signal at the output of the onboard frequency source.
Note:- for India’s IRNSS there are no precise satellite clocks and orbits as they broadcast only 1 frequency which does not allow the dual frequency combination required in precise clock and orbit estimation; as such, only URA and Clock Discontinuity is analyzed.

(f): Satellite Hardware Delay (TGD/BGD)
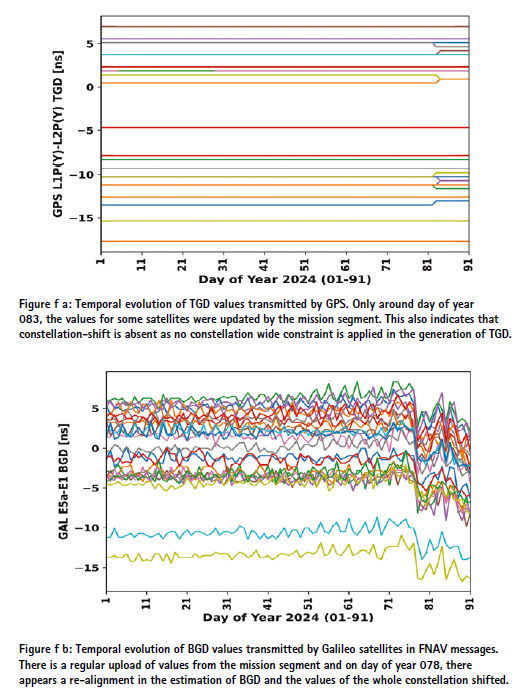
The TGD/BGD parameters transmitted by the GNSS satellites are very useful for code based positioning and timing applications of single-frequency users as well as dual-frequency users. Such parameters also provides enhanced solutions for precise point positioning by reducing the convergence time and enabling the ambiguity fixing of the carrier phase. The inherent nature of the satellite broadcast clock offset estimation requires the users to be consistent with the signal combination used in the ionosphere-free combination of the satellite clock offset computation. When other signal combinations are desired at the user level, the respective hardware delays captured by the TGD/ BGD parameters are applied. The values for TGD/BGD are either calibrated and uploaded to the satellite or estimated as a part of the mission control activities and then uploaded to the satellite with varying temporal resolutions (Wang et.al, 2019).
It is to be noted that the absolute hardware delay is not observable from the available measurements and hence, the delay in a particular signal is estimated with reference to another signal. In a post-process estimation, as in the case of IGS products, such parameter is referred to as Difference Code Biases (DCBs). Different conventions and assumptions are used in the estimation of TGD/BGD at the mission control segment. The functional model in the GNSS estimation of DCB suffers from a rank deficiency in which only the sum of the satellite and receiver (the ground network used for the DCB estimation) is estimable. The common approach to overcome the rank deficiency has been the application of a constellation zero-mean constraint. This method is used in the computation of BGD for Galileo constellation. For GPS, a calibrated reference receiver is used to generate the TGD. Beidou constellation does not apply the zeromean constraint but there is a strong indication that a reference satellite with pre-calibrated biases is used for the generation of TGD. The values of TGD/ BGD are not changing ones and remain stable for several days/weeks. In fact the mission segment update rate can range from several days to weeks to months. Only Galileo constellation provides a frequent update (daily/sub-daily basis) on the parameter. It is, therefore, interesting to look into the time-series of these parameters per constellation and monitor how and when there is a shift/jump.
For GPS satellites, the hardware delay differences between onboard L1P(Y) and L2P(Y) signals are captured by the TGD parameters transmitted in the legacy navigation LNAV message.
For Galileo satellites, the BGD is based on the FNAV signal with a combination of E5a-E1.
For Beidou satellites, the CNAV signal provides TGD based on B1I and B3I signals.
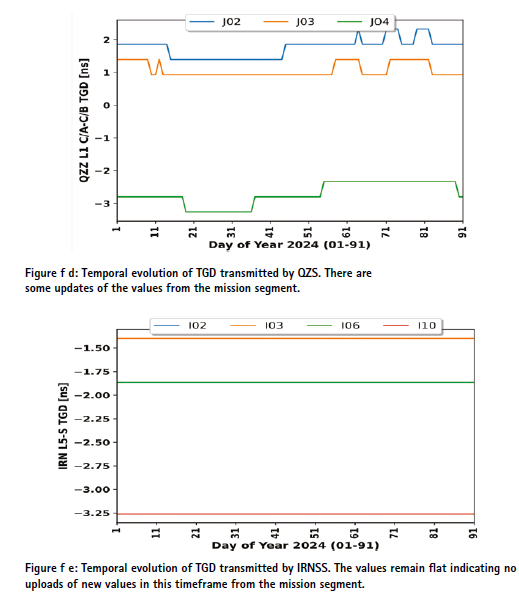
For QZSS, the TGD parameters are based on L1C/A and L1C/B.
For IRNSS satellites, the TGD is based on L5 and S signals.
In the coming issues of the monthly performance analysis, an effort will be made to analyze the quality of the broadcast TGD/BDG against the more precise DCBs. There will also be some perspectives on the factors that trigger the updates/changes of TGD/BDG values.

Monthly Performance Remarks:
1. Satellite Clock and Orbit Accuracy
• For GPS, the satellite clock and orbit accuracy shows better performance in March 2024. The atomic clocks on-board the GPS satellites showed greater performances. This is reflected also in the overall statistics of satellite clock jumps. It is slightly improved in comparison to previous months.
• For Galileo, all parameters showed consistent performances.
• For GLONASS, no large clock offsets were detected unlike in January. The performance looked similar to the past months.
• For BDS and QZSS, the performance looks very much the same as in December 2023. For QZSS, there are days with better orbit quality and some days with degraded performance. With regard to BDS, satellite C35 was non-healthy from day of year 066 until 080.
• For IRNSS, the notable difference in this month’s performance is the inconsistent URA for I02 satellite. There were a varying confidences in the range accuracy for I02.
2. UTC Prediction (GNSS-UTC):
• Galileo constellation showed a distinct variations in the GNSSUTC prediction. From day of year 071 to 084, the values ranged from 1 ns to 9 ns.
References
Cao X, Zhang S, Kuang K, Liu T (2018) The impact of eclipsing GNSS satellites on the precise point positioning, Remote Sensing 10(1):94
Dhital N (2024) GNSS constellation specific monthly analysis summary, Coordinates, Vol XX, Issue 1 pages 20-22
Hauschlid A, Montenbruck O (2020) Precise real-time navigation of LEO satellites using GNSS broadcast ephemerides, ION
IERS C04 (2024) https://hpiers.obspm. fr/iers/eop/eopc04/eopc04.1962-now IGS (2021) RINEX Version 4.00 https://files.igs.org/pub/ data/format/rinex_4.00.pdf
Li M, Wang Y, Li W (2023) performance evaluation of real-time orbit determination for LUTAN-01B satellite using broadcast earth orientation parameters and multi-GNSS combination, GPS Solutions, Vol 28, article number 52
Li W, Chen G (2023) Evaluation of GPS and BDS-3 broadcast earth rotation parameters: a contribution to the ephemeris rotation error Montenbruck O, Steigenberger P, Hauschlid A (2014) Broadcast versus precise ephemerides: a multi-GNSS perspective, GPS Solutions
Liu T, Chen H, Jiang Weiping (2022) Assessing the exchanging satellite attitude quaternions from CNES/ CLS and their application in the deep eclipse season, GPS Solutions 26(1) Montenbruck O, Steigenberger P, Hauschlid A (2014) Broadcast versus precise ephemerides: a multi-GNSS perspective, GPS Solutions
Steigenberger P, Montenbruck O, Bradke M, Ramatschi M (2022) Evaluation of earth rotation parameters from modernized GNSS navigation messages, GPS Solutions 26(2)
Sylvain L, Banville S, Geng J, Strasser S (2021) Exchanging satellite attitude quaternions for improved GNSS data processing consistency, Vol 68, Issue 6, pages 2441-2452
Wang N, Li Z, Montenbruck O, Tang C (2019) Quality assessment of GPS, Galileo and BeiDou-2/3 satellite broadcast group delays, Advances in Space Research
Data sources:
https://cddis.nasa.gov (Daily BRDC); http://ftp.aiub.unibe.ch/ CODE_MGEX/CODE/ (Precise Products); BKG “SSRC00BKG” stream; IERS C04 ERP files
(The monitoring is based on following signals- GPS: LNAV, GAL: FNAV, BDS: CNAV-1, QZSS:LNAV IRNSS:LNAV GLO:LNAV (FDMA))











 (3 votes, average: 4.00 out of 5)
(3 votes, average: 4.00 out of 5)




Leave your response!