| Mapping | |
Bridging the gap between high-altitude remote sensing and ground survey for sampling in the marine environment
In this study we focus on low altitude remote sensing using remotely piloted aircraft system (RPAS) to streamline sampling in the marine environment |
 |
|
 |
|
 |
|
Recent enhancements in satellite remote sensing has increased the value of remotely sensed data for marine ecologist. With a ground sample distance of 31cm for panchromatic nadir and 1.24m for multispectral nadir (WorldView-4) commercial satellite imagery remains best suited for large scale assessment of benthic marine habitats. However, limited resources and budget could be hurdles to procure such imagery. Occasionally satellite data for desired tidal interval is not always available. On the other hand, ground sampling using quadrats is time consuming and requires additional personnel to cover large areas. Therefore, in this study we focus on low altitude remote sensing using remotely piloted aircraft system (RPAS) to streamline sampling in the marine environment. Along temperate coasts of New Zealand, there is a gap in exploring the potential of RPAS as a low altitude aerial photography tool for sampling fine scale biogenic marine habitats. The survey had been conducted during low tide. The results show RPAS covered the area of interest at user define interval within a reasonable time frame. The outputs are high-resolution orthomosaic and other useful digital surface (DSM & DTM) products. These datasets can be using for various applications and explicitly complement other datasets. While other remote sensing and ground sampling are still valuable and cannot be replaced, RPAS data can complement these datasets for marine conservation planning. Additionally, improving efficiency of small to medium projects.
Introduction
The marine ecosystem encompasses ecologically and environmentally valuable habitats. However, due to unprecedented flux in environmental and anthropogenic pressure the need to effectively monitor this precious ecosystem has never been so important. Fundamental to conserving marine biodiversity into the future is the understanding of natural spatial and temporal variability of marine flora and fauna. While making strategic decisions for improved resilience to natural and anthropogenic disturbances.
Therefore, as technology advances and pressure on marine ecosystem increases, the need for a more effective, robust and swift monitoring technique is demanded. Sampling in the marine environment has been multifaceted, here different data collection techniques has been adapted. One of the widely used datasets are satellite imagery. Enhancements in satellite technology over the past two decades have increased the value of remote sensing imagery to marine ecologists (Ventura et al., 2015). With a ground sample distance of 31cm panchromatic nadir and 1.24m for multispectral nadir data (Worldview-4) commercial satellite imagery is one of the best datasets available. However, some ecosystems compose of habitats that are heterogeneous. It is here that this imagery struggles to provide significantly finer details in areas with heterogenous marine vegetation (Ventura et al., 2018).
Classic techniques still exist scuba; snorkeling; and transects (Samoilys & Carlos 2000). Later improvements included visual underwater video; rotating videos apparatus; multibeam; and side-scansonar technology (Pelletier et al., 2012). The area covered by scuba operators each time is often limited due to difficulty in manoeuvring in shallow (<5m in depth) rocky waters, leading to the partial identification of habitats (Pereira et al., 2009). Alternatively, these techniques require a deep knowledge of the equipment (e.g. sonar) and trained personnel for operation (Ventura et al., 2018). Have high application costs and unsuitable spatial data and are best suited for deep (> 15m) ocean monitoring and survey (Ventura et al., 2016). The difficulty arises when the interest is aimed at identification and cartographic representation of habitats in estuarine, shallow intertidal, and subtidal (<5-7m) habitats (e.g. seagrass). Quadrats along transects is a promising method however this technique is limited to coverage. Here, marine scientists at ground level can collect high-resolution data, but experience sampling constraints across larger spaces (Johnston, 2018). Hence something more versatile is needed to fill these gaps.
Here low altitude remote sensing using RPAS could be a solution. The evolution of unmanned aerial vehicle (RPAS) for low altitude remote sensing in the marine environments has gained momentum (Kovea et al., 2018). In the marine environment drone applications have focused: on topographic monitoring of coastal areas; intertidal reef monitoring mapping coral reefs; marine mammal research; marine coastal environmental monitoring; mapping, and monitoring of ecologically sensitive marine habitats (Goncalves & Henriques, 2015; Murfitt et al., 2017; Casella et al., 2017; Fiori et al., 2017, Trasvina-Moreno et al., 2017; Ventura et al., 2018).
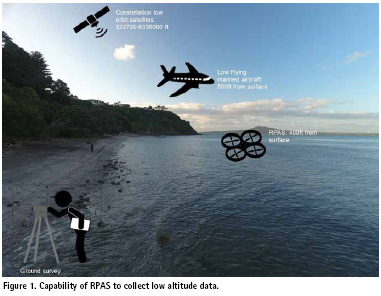
RPAS (Fig 1) provide essential on-demand low altitude remote sensing capabilities, economically with reduced human risk and are poised to revolutionize marine science and conservation. Equipped with the versatile platform: multirotor, fixed wing and transitional models. RPAS can carry various optical and physical sampling payloads and are employed in almost every sub-discipline of marine science and conservation (Johnston, 2018). Subsequently RPAS can fill the gap in spatial resolution with better coverage (at an altitude of a 100m cover maximum of 2.2 to 2.6 hectares per image) (Johnston, 2018). In the nearshore marine environment, RPAS provide high-resolution ecological data for marine conservation planning (Anderson & Gaston, 2013). For point monitoring on a large spatial scale, RPAS datasets can be fully integrated into a geographic information system (GIS) (Brown et al., 2011; Collin et al., 2018).
Whether it is a marine or terrestrial environment. Determining the Where is an important step in being able to assess Why behind changes are occurring in an ecosystem. This study will use a multirotor RPAS with MicaSense RedEdge sensor aimed at reducing field time and at the same time acquire high-resolution products for sampling in the marine environment at user specified intervals.
Significance of this study
New Zealand’s extensive and diverse marine environment is home to many plants, fish, invertebrates and marine mammal species. Many important to the ecological health and productivity of the marine environment (Ministry for the Environment & Statistics New Zealand, 2016). Yet, the marine environment is highly interconnected, and the impacts of activities in one habitat can have flow-on effects elsewhere making management a great challenge.
Most threats to New Zealand’s marine habitats decline with depth at 50 m increments (MacDiarmid et al., 2012). Among the threatened habitats are ecologically sensitive habitats e.g. oysters in intertidal reefs, seagrass in mudflats, mangroves and other vegetation in a saltmarsh (Baird et al., 2011). Ecologically sensitive habitats have critical functions in the wider ocean. These habitats produce oxygen that supports other marine life. Provide nursery grounds for fish and recycle nutrients and human waste and storage of carbon.
Importance of biogenic habitats?
Benthic habitats support a wide variety of marine organisms by providing grounds for spawning, nursery, and refuge. Benthic organisms are important food web members who consume organic matter and phytoplankton and are food sources for higher-level consumers. Several benthic habitats (for example, oyster and kelp forests) have three–dimensional structures that serve as shelters and provide protection during storms by buffering wave action along coastlines (Casella et al., 2017). Biogenic habitats contribute significant services to the marine ecosystem. This included habitat provision, carbon fixation, and nutrient transport. These habitats, directly and indirectly, support numerous cultural, commercial, and recreational fisheries, including the formation of a unique reef ecosystem. Act as ecosystem engineers and provide a focal point for nearshore ecosystem-based management; hence protection of these habitats ensures long term sustainability of other resources.
Method
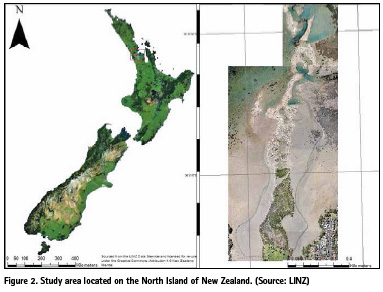
Study Site. Aerial survey was conducted on Meola reef (Te Tokaroa) in the North Island of New Zealand. Located -36.853454 S & 174.709982 E, this reef is the largest and most visible natural rocky reef system in the Waitemata Harbor (Fig 1). From satellite during low tide this reef is fully visible and extents over 2km into the Waitemata Harbor. This is an important rocky reef system supporting higher biodiversity of habitats. Habitats include saltmarsh, mangroves, seagrass and oysters. Where mangroves dominate the landward site, oyster dominate the mid-section of this reef and kelp dominate the subtidal.
Flight Safety
Prior to all flights a RPAS operator must ensure that there is no Notice to Airmen (NOTAM) for that location. Check the New Zealand Airspace Maps (https://www. airshare.co.nz/maps) for Fly and No Fly zones. Currently there are six categories where you can and can’t fly RPAS in New Zealand. These are Low Flying Zones/orange zone (RPAS not permitted to fly in these zone), Military operated zone/green zone (permission to be sort before flights), Aerodromes/ blue zone (4km radius around aerodromes), Other Authorities zone/purple zone (permission before flights), Control zone/ red zone (managed by Air traffic control) and No Fly Zones (not allowed to fly in these areas).
The maximum flight altitude of a RPAS according to Civil Aviation Authority of New Zealand is 120m (400ft) from surface. All flights should be within the visible line of sight. All flights are to be away from people and private property at all time. A warning sign is displayed depicting a RPAS is operating in the area before flights (Fig 3).
The Setup
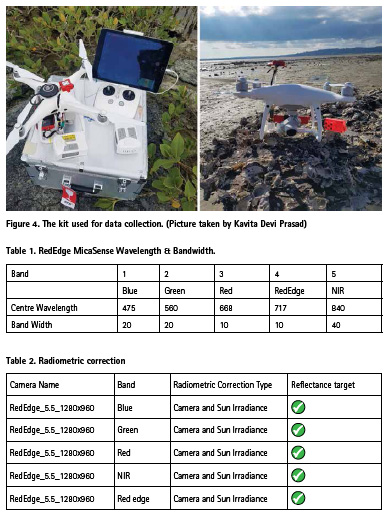
A DJI Phantom 4 pro (Fig. 3) retrofitted with a Mica Sense RedEdge sensor, a sun irradiance senor, GPS, Lipo batteries, DJI controller, Apple I-Pad, cables and hardcase carry box.
UAV Survey. During Mean Lower Low Water (MLLW) tide height at 0.3m on 23rd March 2019. The RPAS platform used was a Phantom 4 pro multirotor. The RPAS was retrofitted with a MicaSense RedEdge multispectral senor with five bands Blue, Green, Red, NIR and Red Edge (Table 1).
RPAS data acquisition. Pix4D capture (© 2017 Pix4D) (V. 4.5.0) an open source flight planning software was used to plan the flights. Flight mission were flown at an altitude of 164ft from surface at nadir. Front and side overlap were set to 80% to get an equal distance between the two images on the same flight line. Picture trigger mode in the app was set to Fast mode since this mode does not require to stop in order to take a picture it is continuous, and the orientation is always maintained. Flight speed was set at 3m/s to avoid blurry images. Flights times was limited to 10 minutes to allow adequate battery for the RPAS to return safely. Ground control point (GCP) were randomly place within the area of interest for accurate geo-referencing of imagery.
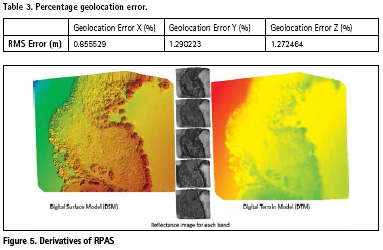
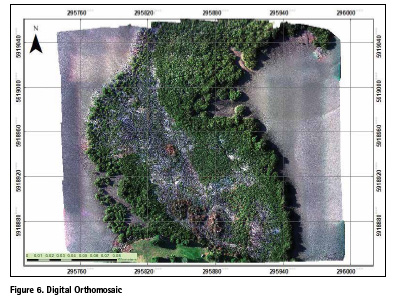
RPAS data processing. The imagery collected were geotagged with Pix4D capture prior processing. Full processing was initiated in Pix4D mapper software (V. 4.4.12). Radiometric calibration was applied to each band using values and reflectance panel supplied my MicaSense (Table 2). The initial processing setup automatic tie points are created and GCP are added to the model for accurate georeferencing. After adding the GCP the orthomosaic had an accuracy of 0.02m. Furthermore, the software calculated coordinates of images to create a point-cloud, generated a digital surface model (DSM), digital terrain model (DTM), reflectance corrected images for each band.
Results
Digital output (DSM, DTM & Orthomosaic) created from RPAS have an average ground sampling distance of 3.36cm/pixel (Fig 5). An average geolocation accuracy of 0.02m. Area covered 0.053km2/5.2961ha. Time for flight was 10 minutes in the field. Total time for initial processing was 01h:44m:19s. Time taken for point cloud densification was 15m:49s and for point cloud classification 01m:26s.
Absolute Geolocation Variance: This represents the percentage of geolocated and calibrated images with a geolocation error in X, Y and Z. This percentage also evaluates the quality of image geolocation. The errors range between interval of -1.5 & 1.5 times the maximum accuracy Amax of all images. An error lower than -1.5 *Amax or higher than 1.5 *Amax means the accuracy values have not set correctly.
Conclusion
RPAS remote sensing is a viable technology for producing high-detail products over user define intervals and for temporal data. The total time taken for field work and data processing were less than 3hrs. This can certainly improve the efficiency of small projects to get faster results. These high-resolution RPAS derivatives can be used for a variety of classification analysis. Including DSM and DTM for surface classification.
Acquiring high-resolution remotely sensed data from commercial satellite operators is not always feasible for small to medium projects. At many times low tide satellite data for marine sampling is not available. The cost of for acquiring data alone would be the total budget for some projects. Here new technologies of low altitude remote sensing using RPAS provide a novel and cost-effective solution for marine research. In addition, this technique of acquiring data is far safer and more reliable than SCUBA or snorkeling. Another critical component of every project is time frame, which many studies have shown the reliability of project delivery. High resolution data analysis and results show more accuracy and provide an important area for research for environmental science. RPAS in the marine environment is getting popular and is important to advance marine environmental research, conservation and management strategies.
The plethora of different RPAS models and miniaturization of sensors provide flexibility for researchers. RGB and multispectral sensors are now readily available in the market. There is no doubt that this technology will lead to more applications in the marine environment and researchers gaining more insights and knowledge about ecosystems previously not explored. There is inevitably always going to be trade-off between detail obtained from field observation and logistics involved, here RPAS can effectively complement the efficiency of any field work.
References
Anderson, K., & Gaston, K. J. (2013). Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ, 11, 138–146. https://doi.org/10.1890/120150
Brown, C. J., Smith, S. J., Lawton, P., & Anderson, J. T. (2011). Benthic habitat mapping: A review of progress towards improved understanding of the spatial ecology of the seafloor using acoustic techniques. Estuarine, Coastal and Shelf Science, 92(3), 502–520. https://doi. org/10.1016/j.ecss.2011.02.007
Baird, S. J., MacDiarmid, A., Thompson, D., & Ching, N. (2011). Review of threats to New Zealand’s marine environment Prepared for The Department of Conservation. National Institue of Water & Atmospheric Research Ltd. Retrieved from http://www.kaiparaharbour. net.nz/Content/Publications/Bairdetal2012_ Threats_to_NZ_Marine_Envt.pdf
Collin, A., Ramambason, C., Pastol, Y., Casella, E., Rovere, A., Thiault, L., & Davies, N. (2018). Very high-resolution mapping of coral reef state using airborne bathymetric LiDAR surface-intensity and drone imagery. International Journal of Remote Sensing, 39(17), 5676–5688. https:// doi.org/10.1080/01431161.2018.1500072
Casella, E., Collin, A., Harris, D., Ferse, S., Bejarano, S., Parravicini, V., Rovere, A. (2017). Mapping coral reefs using consumer-grade drones and structure from motion photogrammetry techniques. Coral Reefs, 36(1), 269–275. http:// doi.org/10.1007/s00338-016-1522-0
Fiori, L., Doshi, A., Martinez, E., Orams, M. B., & Bollard-Breen, B. (2017). The use of unmanned aerial systems in marine mammal research. Remote Sensing, 9(6), 11–17. https://doi.org/10.3390/rs9060543
Goncalves, J. A., & Henriques, R. (2015). UAV photogrammetry for topographic monitoring of coastal areas. ISPRS Journal of Photogrammetry and Remote Sensing, 104, 101–111.https://doi. org/10.1016/j.isprsjprs.2015.02.009
Johnston, D. W. (2018). Unoccupied Aircraft Systems in Marine Science and Conservation. Annual Review of Marine Science, 11(1), annurev-marine-010318-095323. https://doi. org/10.1146/annurev-marine-010318-095323
Koeva, M., Muneza, M., Gevaert, C., Gerke, M., & Nex, F. (2018). Using UAVs for map creation and updating. A case study in Rwanda. Survey Review, 50(361), 312–325. https:// doi.org/10.1080/00396265.2016.1268756
Murfitt, S. L., Allan, B. M., Bellgrove, A., Rattray, A., Young, M. A., & Ierodiaconou, D. (2017). Applications of unmanned aerial vehicles in intertidal reef monitoring. Scientific Reports, 7(1), 1–11. https:// doi.org/10.1038/s41598-017-10818-9
Ministry for the Environment. (n.d). Marine areas with legal protection. Retrieved April 12. 2018, from http://www.mfe.govt.nz/more/ environmental-reporting/marine/marine-areaslegal- protection-indicator/marine-areas-legal
MacDiarmid, A., Mckenzie, A., Sturman, J., Beaumont, J., Mikaloff-Fletcher, S., & Dunne, J. (2012). Assessment of anthropogenic threats to New Zealand marine habitats. New Zealand Aquatic Environment and Biodiversity Report (Vol. 93). Retrieved from http://healthyharbour. org.nz/wp-content/uploads/2016/08/ McDiarmid-2012-Anthropogenic-threats.pdf
Piazza, P., Cummings, V., Lohrer, D., Marini, S., Marriott, P., Menna, F., Schiaparelli, S. (2018). Divers-operated underwater photogrammetry: Applications in the study of antarctic benthos. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences – ISPRS Archives, 42(2), 885–892. https://doi. org/10.5194/isprs-archives-XLII-2-885-2018
Pelletier, D., Leleu, K., Mallet, D., Mou- Tham, G., Herve, G., Boureau, M., Guilpart, N. (2012). Remote high-definition rotating video enables fast spatial survey of marine underwater macrofauna and habitats. PLoS One 7 (2), e30536. http://refhub.elsevier. com/S0272-7714(16)30030-0/sref51
Pereira, E., Bencatel, R., Correia, J., Felix, L., Gonçalves, G., Morgado, J., & Sousa, J. (2009). Unmanned Air Vehicles for Coastal and Environmental Research. Journal of Coastal Research, 56(56), 1557–1561. https://www.jstor.org/stable/25738051
Samoilys, M. A., & Carlos, G. (2000). Determining methods of an underwater visual census for estimating the abundance of coral reef fishes. Environ. Biol. Fishes 57 (3), 289–304. http://refhub.elsevier. com/S0272-7714(16)30030-0/sref59
Trasvina-Moreno, C. A., Blasco, R., Marco, A., Casas, R., & Trasvina-Castro, A. (2017). Unmanned aerial vehicle based wireless sensor network for marine-coastal environment monitoring. Sensors (Switzerland), 17(3), 1–22. https://doi.org/10.3390/s17030460
Ventura, D., Bonifazi, A., Gravina, M. F., Belluscio, A., & Ardizzone, G. (2018). Mapping and classification of ecologically sensitive marine habitats using unmanned aerial vehicle (UAV) imagery and Object-Based Image Analysis (OBIA). Remote Sensing, 10(9), 1–23. https://doi.org/10.3390/rs10091331
Ventura, D., Bruno, M., Jona Lasinio, G., Belluscio, A., Ardizzone, G. (2016). A lowcost drone based application for identifying and mapping of coastal fish nursery grounds. Estuarine, Coastal and Shelf Science, 171, 85– 98. http://doi.org/10.1016/j.ecss.2016.01.030
Ventura, D., Jona Lasinio, G., Ardizzone, G. (2015). Temporal partitioning of microhabitat use among four juvenile fish species of the genus Diplodus (Pisces:Perciformes, Sparidae). Mar. Ecol. 36, 1013e1032. http:// dx.doi.org/10.1111/maec.12198











 (7 votes, average: 4.71 out of 5)
(7 votes, average: 4.71 out of 5)




Great article
Leave your response!