
| UAV | |
Flight safety: Aspects to be considered in commercial fixed-wing Unmanned Aerial Vehicle (UAV) operations
A holistic summary of important criteria needed for safe and successful flights |
 |
|
 |
|
Abstract
Flight safety has become the main concern in drone operations nowadays and encompasses a mindset that embraces the discipline to protect the public, possessions, and industry. This paper presents important considerations for flight safety that the operator (researcher, industry user, etc.) should know about and adhere to in guaranteeing safe and successful flights. Nevertheless, flight safety is mainly reliant on the knowledge and skills of the operator in respect of the following: regulations around UAVs, operational systems around equipment and flight parameters, piloting and/or commanding skills, and the ability to make sound judgments on external circumstances that may hinder safe operations. Furthermore, this article also shows that drone operations are not only measured by successfully placing a UAV in the air and capturing the images below it, but achieving flight safety, and thereby flight success.
1. Introduction
The increasing use of unmanned aerial vehicles (UAVs) offers a range of opportunities for the improved management of crops, forests, fisheries, and other natural resources. A UAV, an unmanned aerial vehicle, also known as a drone, is considered to be a component of an unmanned vehicle system (UAS); it is the remote-controlled aircraft operated from a ground control station but without a person on board (Kardasz and Doskocz, 2016). Nowadays, UAVs are rapidly replacing conventional aerial photography and providing high spatial resolution aerial photos.
Among UAVs, fixed-wing drones have been at the forefront of the market since 2019. This is due to their long-term endurance, making them suitable for commercial and military applications and the long-range monitoring of large-scale agricultural f ield (Zhang and Kovacs, 2012). They are able to map larger areas, to carry out environmental/forestry surveys, and to fly beyond the visual line of sight (BVLOS) (Small Drone Market, 2018). However, one downside of the fixed-wing drone compared to the multi-rotor drones is their inability to hover in the air (Singhal et al., 2018) and the higher procurement and maintenance costs that they incur (DroneDeploy, 2017a). Operating a fixed-wing aircraft is complex and requires high levels of training and skills to launch, fly, and land it smoothly (Chapman, 2016; Boon et al., 2017). Unlike other drones, preparing fixed-wing aircraft for flights requires a series of preparatory checks and tests on the equipment itself which ultimately extend to the assessment of the mission area to ensure flight safety.
Flight safety has now become the focus of discussion in UAV flight operations (Chamola et al., 2020). Flight safety refers to a mindset including awareness, safety, and self-discipline that will protect the involved people, aircraft, properties, jobs, and the industry. The basic risk associated with flight safety starts with a simple case of ignorance of the law and the unpreparedness of the operator as a result of a lack of proper training that could lead to human errors (Wackwitz and Boedecker, 2015), the unfamiliarity of the user in terms of the equipment used, a lack of knowledge regarding proper maintenance (Hobbs and Herwitz, 2006), and the complexity of the operation, all of which are aggravated by the pressure to succeed (QuestUAV, 2017).
This review paper aims to support beginners or novice researchers, industry users, and/or drone business owners engaged in fixed-wing drone operations. The paper covers several topics, including laws and regulations (Section 2), equipment familiarization (Section 3), pre-flight preparation and planning (Section 4), flight operation (Section 5), post-flight measures (Section 6), and image processing and analysis, that must be considered to ensure safe flight operations and successful missions.
For the clarity of this paper, all UAVs or drones mentioned in the succeeding discussions refer to fixed-wing drones used for commercial purposes (e.g., for monitoring the infrastructure and for aerial imaging, but with the exception of those purposes mentioned in the laws and regulations (Section 2), or as specified, which may also be applicable to multi-rotor or hybrid drones.
2. Know the rules: the UAV operation regulations
Owing to the fast-growing UAV industry (Stöcker et al., 2017; Prisznyák, 2018), UAV regulations are in place to ensure public safety (Dronenerds, n.d.). UAVs are the objects in airspace that could impose potential risks to other airspace users, as well as to third parties on the ground, including, but not limited to people, animals, and properties. Therefore, in order to control the process and reduce the potential risks, increasing numbers of countries are now imposing regulations on UAV operations (Chamola et al., 2020; Stöcker et al., 2017; Zhang et al., 2018).
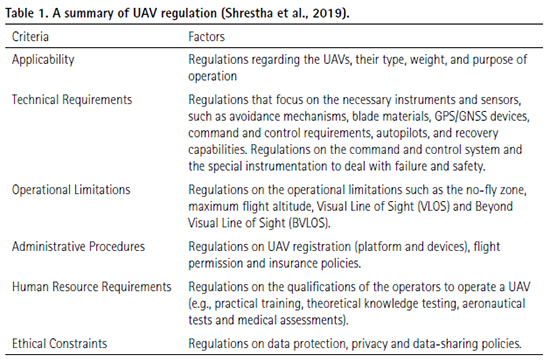
A comprehensive review by Stöcker et al. (2017) on the current scenarios of UAV regulations, and accordingly, on the drafting of UAV regulations, focuses on three aspects, namely, : (1) regulating the use of airspace as UAVs could seriously endanger manned aircraft; (2) mandating operational limitations to guarantee appropriate flights; and (3) setting administrative procedures on granting flight permission, pilot licenses and on authorizing data collection flights. Furthermore, as shown in Table 1, the regulation of UAVs has been incorporated into six components, namely, applicability, technical requirements, operational limitations, administrative procedures, human resource requirements, and the implementation of ethical constraints.
Applicability defines the scope of the regulation related to the type, weight, and purpose of a UAV operation. Stöckeret et al. (2017) compared the applicability regulations of 19 countries, including the United Kingdom, Australia, Malaysia, the United States, Canada, France, the Netherlands, Germany, Italy, Austria, Spain, Azerbaijan, Chile, Columbia, South Africa, Japan, Nigeria, Rwanda, and China. Fifteen (15) countries include the use of UAVs for recreation in their regulations, while the other four (4) include the use of UAVs for commercial flights only. A commercial flight is defined as a flight engendering profit. Furthermore, most countries impose constraints based on weight and associated risks, with heavier drones subject to stricter flight conditions. On the other hand, the United States and Japan have introduced a minimum weight threshold in their regulations: in fact, all drones below the threshold are not subject to their regulations (Hermann and Markert, 2020). Similarly, some countries include the maximum take-off mass, above which drones are controlled in terms of the regulations for manned aircraft (European Aviation Safety Agency, 2015).
Technical requirements cover the necessary instruments and sensors that are included in drones, such as, amongst others, their collision-avoidance mechanisms, blade materials, GPS/GNSS devices, command and control requirements, autopilot systems, and recovery capabilities. The integration of collision-avoidance capabilities in UAVs is widely discussed (Yu and Zhang, 2015), although the U.S. has not yet incorporated these into their regulations, as the technology is still young and no instruments have been issued with airworthiness certification (Federal Aviation Administration, 2016). Some countries focus on specific requirements, while others prioritize the command and control system and the special safety instruments that allow flights to be terminated in case of malfunctioning or the loss of command and control links (Stöcker et al., 2017). Therefore, it is important to consider a specific country’s minimum technical requirements when purchasing UAVs to avoid issues when licensing them for commercial use.
Operational limitations are the most common criteria constituting the UAV regulations, which cover flight restrictions (Shrestha et al., 2019; Stöcker et al., 2017; Tsiamis et al., 2019). Operational limitation parameters include the allowable distance to conduct a UAV f light from an airport/landing strip or aerodrome; limitations on their operation over a populous area, over a restricted area (i.e. controlled airspace, military camps, hospitals, and nuclear power plants); the maximum flight altitude, and Visual Line of Sight (VLOS) and Beyond Visual Line of Sight (BVLOS). The horizontal flight distance, where a flight is not permitted to invade the space accommodating people, property or an airport/landing strip, is called a no-fly zone. The common UAV regulations prohibit flying within a 30 to 150m radius of people and within a five kilometre radius of an airport/landing strip and aerodrome. This regulation is due to the potential danger posed to people and manned aircraft which are taking off or landing. The maximum flight altitude (above ground level) is within a maximum range of 90 to 152m (Stöcker et al., 2017).
The horizontal distance between the operator and the UAV could be either VLOS or BVLOS. In VLOS conditions, the operators are able to visually monitor the UAV with their own eyes (International Civil Aviation Organization, 2015), while BVLOS conditions refer to the situations in which the UAV is beyond the operator’s visual range but still within the range of remote control (South African Civil Aviation Authority, 2017). Some are countries allowing only VLOS, while others permit BVLOS flights under special f light conditions or via exceptional flight approval conditions (Stöcker et al., 2017).
Administrative procedures impose the need to obtain flight permission, for UAV registration, and for insurance. Generally, the level of effort in applying for permission to fly depends on the complicated nature/difficulty of a UAV operation. Owing to different UAV operations, each application procedure is multi-layered and may be within different contexts. Some countries do not require an application procedure for UAVs above the maximum take-off weight (MTOW), while others require registration for every single flight. Similarly, in the case of the national and/or local authorities, flight permission is a common practice in most countries. The approval of the landowner on whose property the UAV is about to take-off is also obligatory (Shrestha et al., 2019; Stöcker et al., 2017). As reported by Stöcker et al. (2017), insurance registration is required in most countries. Any damage or harm caused through the f light operation is borne by the insurance provider; thus, the insurance company should have the capacity to compensate the affected parties for possible damages in the case of accidents (Boucher, 2015).
Human resource requirements govern the regulations for the qualification of pilots and their license to operate a UAV (Shrestha et al., 2019; Stöcker et al., 2017). The most common requirement for a UAV pilot is practical training, theoretical knowledge tests, aeronautical tests, and a medical assessment. Japan does not require UAV pilots to hold an aviation license, while other countries, such as the UK and Germany, request only basic competencies for the affirmation of UAV pilots (Masterlist of Drone Laws (organized by State and Country, n.d.). Likewise, most countries demand a pilot license or certification, especially when commercial flights are conducted (Stopforth, 2017). Nevertheless, UAV operations in Malaysia require two persons (a pilot and a commander), with both holding a valid pilot license (Department of Civil Aviation, Malaysia, 2017).
Owing to the increasing use of UAVs, privacy and data security are currently topics of discussion. Ethical constraints are an important component of UAV regulation since they deal with data protection and privacy. UAVs can be fitted with a variety of payloads, including cameras that can capture and record data on individuals, houses, buildings, and other objects that potentially breach people’s privacy and data security (Shrestha et al., 2019; Stöcker et al., 2017). Despite the value of ethical restrictions, very few countries have integrated them into their UAV regulations. Instead, most urge UAV operators to respect personal privacy, while others refer directly to their respective privacy laws (Stöcker et al., 2017).
Failure to comply with UAV regulations is subject to legislation and penalties which depend on the policies of each country. Many countries issue a warning letter for minor offences, while others may enforce the suspension or revocation of a pilot license or certificate, impose civil penalties (fees), and even incarceration for felony offences, or a combination of these (Broadley, 2016; Wagstaff, 2015; LIDARNews, 2019).
3. Familiarize yourself with your drone: the first step for a safe flight
It takes a lot of time and effort, more than what is expected, to achieve success (QuestUAV, 2017). This involves continuously improving the operators’ skills, their mastery of the UAV parts and functions, and their gaining in experience through every flight. Operator skills must, of necessity, be upgraded; continuous training, flight experience, and sharing in the knowledge of other operators can increase insights into the system (Easy Access Rules for Unmanned Aircraft Systems, 2021; O’Shea, 2020). For example, launching skills may differ depending on the type of drone. The proper posture and timing of release should be developed for bungee-launched f ixed-wing drones (Shyu and Hsiao, 2014), while an accurate pitch should be observed in a hand-launched fixed-wing drone. In terms of landing, manually operated and/or parachute-landed drones require sufficient training and practice for an ideal landing approach and the correct timing for parachute release, respectively. For fixed-wing drones with autonomous landing equipment, continuous insights into proper planning for the landing site are necessary, especially in locations with undulating terrain. O’Shea (2020) stated that reaching out to the drone community and sharing professional experiences are important aspects in creating a positive safety culture in drone operation.
Typically, a fixed-wing UAV airframe includes the avionics system, main body (frame), motor, propeller and batteries, payloads, and wings, each with an aileron1 and a wing tip (Gonzáles-Jorge et al. 2017). There are several UAV manufacturers that integrate the ailerons and wing tips into the wing structure. They include senseFly, Hitec Commercial Solutions, DellAir, and Skywalker Drone Solutions LLC Company, to mention a few. Each UAV component has a specific mode of maintenance that could be either corrective or preventive, and the activities might be critical and time-consuming. The former mode of maintenance involves the repair or replacement of parts as a result of wear-and-tear or damage, while the latter involves inspection or the replacement of parts at predetermined intervals (Hobbs and Herwitz, 2006).
The UAV operating limitations must be known to the operator (Sims, n.d.). Operating limitations are any circumstances or inherent characteristics of UAV sensors or electronics that will hinder operations, including, but not limited to the flight crew, operating tolerance (in respect of weather conditions, wind, air temperature), and take-off and landing locations. In some instances, a two-man policy, with a pilot and a commander to operate the f ixed-wing UAV unit, is recommended (Aeronautical Information Services Malaysia, 2008), each with specific functions for the success of the flight. Operating tolerance is another important factor (Liu et al., 2021). Each type of UAV has its own upper and lower limits to deal with the wind and air temperature within which the UAV can be operated. Gao et al. (2021) state that operating outside the recommended weather operating tolerances is highly prohibited as it will damage the equipment. Thus, it is necessary to check with the manufacturer what the operating tolerances of the drone are before engaging in an actual flight. Furthermore, air temperature directly affects the performance of the UAV electronics, which may lead to systemic glitches and cause sudden malfunctions in the UAV system. Typically, take-offs and landings require a large open space and flat land to facilitate the launching and recovery of the UAV after aerial imaging (Knoops, 2018). Fixed-wing UAVs have several ways of taking off, including those involving a bungee cord, a launch trail, those executed manually (by hand), and a combination of all three. On the other hand, the landing could be a belly landing or by parachute (McEvoy et al., 2016). For the belly landings, grassy fields free of any obstructions, such as big stones or tree stumps, are necessary (Knoops, 2018).
The Ground Control Station (GCS) is a vital element in UAV flights. It allows for monitoring at high altitudes while the operator is on the ground (Vasile et al., 2019). The GCS transmits guiding and payload commands and receives information on the flight status (e.g. location, altitude, velocity, direction) and the mission payload. For fixed wing UAVs, this usually involves a laptop installed with a mission planner (Singhal et al., 2018; Pepe et al., 2018). The flight parameters, including failsafe behaviour, are programmed in the mission planner before they are uploaded to the UAV autopilot. Therefore, in-depth and detailed training on the mission planner software is very important, as any missed settings will jeopardize the safety of a f light operation (Singhal et al., 2018).
4. Pre-flight preparation and planning and their importance
Pre-flight planning and preparation play an importance role in the safe and successful aerial imaging campaign (UAV Technology, n.d.; Zhang et al., 2018). Pre flight preparation and planning include a safety risk assessments; evaluations of the weather forecast, ideal flying time, the number of ground control points (GCP’s), and equipment; material checks; and flight crew orientation.
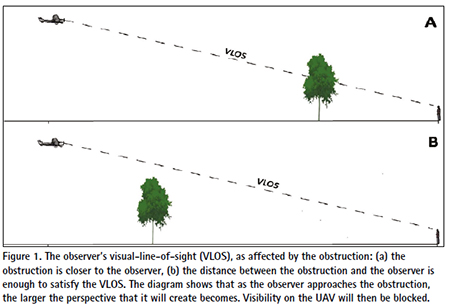
In this article, safety risk assessment is defined as the physical and remote evaluation of the area to be flown to identify operational safety hazards (Wackwitz and Boedecker, 2015). With knowledge regarding the mission area, the risk assessment should be carried out a day before each scheduled flight (QuestUAV, 2017). During the risk assessment stage, the area is examined for possible risks to the flight crew, equipment, and the inhabitants in the vicinity (Shawky, 2022). Flight crew security should be ensured, especially in those areas that are inhabited but unfamiliar to the crew. Upon seeing an UAV in the air, people may think that they are under surveillance and that their privacy is being threatened (Kardasz and Doskocz, 2016). Proper coordination with local officials before scheduled flights should, therefore, address this matter. The purpose should be explained, and those areas that the imaging may possibly cover should be disclosed. With this, the officials may inform the community not to be anxious when seeing a UAV passing over their respective areas or houses. Similarly, possible obstructions to the operator’s good visual length of sight (VLOS), such as tall trees, buildings, the topography, and power lines, must be accounted for. Figure 1 shows the effects of obstructing the VLOS. As the operator approaches an obstruction, their perspective of the scene would be larger and might even block their visibility of the UAV during flight (Mejias et al., 2021).
Furthermore, the proper selection of a GCS location is necessary. The GCS must be within or outside the mission area. For larger fields, it is recommended that the GCS location be established in the middle of afield (UAV Technology, n.d.). The location must be free of VLOS obstructions and have enough space for take-offs and landings. To better understand the vicinity of the mission area, Google Earth could help as it can show the topography of the area and the possible dead spots (Tahar et al., 2012; Sims n.d.).
Weather is one of the major challenges that a UAV mission may face (Pepe et al. 2018; Tmušić et al. 2020). Important weather parameters in UAV operations are the probability of rainfall; wind speed and direction, cloud cover, and air temperature. Rainfall is one of the major hindrances to UAV operations, as many UAVs are highly sensitive to water, and exposure to rain can damage the unit. Rainwater can also degrade the control link, while visibility difficulties might be experienced by the observer (National Civil Aviation Agency, 2018). Flying in strong winds, especially above the wind speed limit, may cause problems with navigation since the UAV may lose strength in order to overcome wind resistance or to quickly attain a higher speed (Dronegenuity, n.d.; National Civil Aviation Agency, 2018; Wang et al., 2020). Similarly, high winds increase the flight duration and cause poor image quality (DroneDeploy, 2017b). Strong winds may also result in excessive shaking and will cause image blurring (Fernández-Guisuraga et al., 2018). On the other hand, cloud cover may not affect the performance of the UAV but may affect the data it captures (Pepe et al., 2018). MicaSense (n.d.) state that rolling clouds may cause deep shadows and significantly affect the results when a multispectral camera is used. Monitoring air temperature is essential to ensure that the UAVs are still within the operating limitations of the equipment’s prescribed temperature.
The purpose of an aerial imagery campaign defines the parameters during pre-flight planning and should primarily be established to ensure the quality of the data gathered. This will determine the type of sensor to be used (RGB, multispectral-, or hyperspectral-camera) and characterize the flight parameters, such as flight altitude, ground sampling distance, flight duration, flight pattern, and image overlap during the pre-flight planning stage (Ruzgiene, 2012). Flight parameters are variable but interrelated. For instance, with the same mission area and image overlap, an increasing flight altitude will, as a result of an increase in the coverage of the area per image taken, reduce both the resolution of the image (Pavelka et al., 2018) and the duration of the flight (Mesas-Carrascosa et al., 2015; Seifert et al., 2019; Torres-Sánchez et al., 2013). In the same way, an increase in the mission area and/or image overlap at the same flight altitude will concurrently increase the flight duration (Tidula et al., 2020). Image overlap deals with the forward and side laps (Mesas-Carrascosa et al., 2015). Forward overlap (forward lap) indicates the percentage of recurring views in two images in the direction that the UAV takes, while the side overlap (side lap) represents the overlap between two or more images on the adjacent track. A higher side lap, combined with a higher forward lap, increases the detail of the image reconstruction (Seifert et al., 2019). As reported by Seifert et al. (2019) and Domingo et al. (2019), forward lap at >90% and side lap at 70% proved to be the most efficient with respect to flight time, coverage area, and processing time. The combination of flight altitude and image overlap has different effects on the duration of the flight. A decreasing f light altitude involving the same image overlap increases the flight duration enormously (Seifert et al., 2019), as does an increasing image overlap in conjunction with a constant flight altitude. Mission area lay-out (Knoops, 2018) and wind direction (Tmušić et al., 2020) influence the flight pattern and may either increase or reduce the duration of the flight (Mesas-Carrascosa et al., 2015). Ideally, for better fixed-wing stability while capturing images, the flight pattern should be perpendicular to the wind direction (Tidula et al., 2020). For elaboration: − if the wind direction is parallel to the longer side of the field, the flight pattern should be parallel to the shorter side of the field. However, owing to an increase in flight lines, such a set-up will increase the duration of the flight but lessen the negative effect of the wind on both the unit and the images captured. A flight line is a single strip that represents the path of a UAV while it is travelling in the air and taking images of phenomena on the surface of the Earth below (Ruzgiene, 2012). Considering the subtle wind, the flight pattern would in any case be ideal. The best practice is to set the flight pattern parallel to the longer side, thereby lowering the flight line and reducing the duration of the flight. When planning for areal coverage, a 10% security margin is recommended to maximize the spatial resolution (Mesas-Carrascosa et al., 2015). A further consideration is that the duration of the flight should be limited to the battery of the UAV. Therefore, a large area should be divided into smaller areal components to accommodate several flights. This would be advisable when the amount of electricity required in the battery of a UAV is considered in order to ensure that it will land safely.
The ideal time to conduct aerial imaging is still unclear. Generally, best results are attained when the declination of the sun is greater than 30°. However, this recommendation is not always valid (Pepe et al., 2018). Likewise, UAV Technology (n.d.) mentions that aerial imaging between 9:00 am and 11:00 am is recommended in areas experiencing high temperatures (e.g., Mali and Northern Nigeria in West Africa), since high temperatures may cause the over-heating of the camera and/or the unit. Tidula et al. (2020) state that early to mid-morning and mid to late afternoon are the best times for aerial imaging in terms of the Mindanao, Philippines, setting. These periods give warmer light, very good views of the landscape (Sims, n.d.; Yeager, 2017) and the air over them is calmer. There are, however, places which experience strong winds and increased cloud cover in the afternoon, which makes early morning the ideal time for good imaging. Additionally, it should be noted that owing to specular reflectance from the land surface and other land cover types, flying at solar noon should be avoided (UAV Technology, n.d.).
The number of ground control points (GCPs) to be installed during a UAV f light should be identified. GCPs are marked on the ground in terms of the known geographic location and elevation both of which are used to calibrate the global accuracy of the captured images. A GCP could be a permanent mark, structure, or any object that can be set up by the operator before a flight and that would remain visible in an image at a desired flight altitude. Ideally, white clothes, jute sack, or a tarpaulin with a dimension of at least 1x1m are ideal up to a flight altitude of 121m. The distribution of GCPs, contributes to the accuracy of a project (Aerotas, n.d.). It should be carried out in such a way that the mission area is covered. For example, to ensure a good geometric correction in the distribution of five (5) GCPs, there would be one at each corner of the field and one in the middle (UAV technology, n.d.). The minimum number in the case of GCP image processing is three (3), but it is highly recommended to set up more ground control points (Oniga et al., 2018). On testing three (3) to 40 GCPs in a one hectare mission area, the Oniga et al. (2018) result showed that one GCP/200m2 is necessary to attain high-quality results in the final product. Likewise, Tahar (2013) tested four to nine (4-9) GCPs in a 1.5km2 (150ha) mission area. Their f inding showed that their eight (8) and nine (9) GCPs recorded good results in RMSE for the Easting and Northing coordinates. The results of the studies by Oniga et al. (2013) and Tahar (2013) signify that as the number of GCPs increases, so the final product obtained tends to be more accurate. Somehow, the accuracy of the GCP method is also affected by the Global Positioning System (GPS) used in capturing the coordinates. If applicable, a Real-time Kinematic/Post-processing Kinematic (RTK/PPK) GPS receiver must be used to capture the ground data of the GCPs. If possible, the GCPs should be laid out a day before the scheduled flight mission.
The preparation of the equipment and materials needed must be carried out a day before the scheduled flight. Preparation activity includes charging the UAVs, GCS/ laptops – and the transmitter batteries. The UAV airframe should be thoroughly inspected for any damage and if any, repairs should be carried out before conducting a flight. Furthermore, the free space on the UAV- and camera memory card should be verified to confirm whether it is still adequate for the imaging process. A list should be compiled to facilitate the packing of the systemic materials and equipment to the effect that no materials and equipment are overlooked (e.g., leaving SD cards behind2 in a base station kilometres from the mission area).
The flight team could include a two crew or three-crew setup. The additional crew member apart from the pilot and commander is known as the spotter. A pre-operational briefing should be conducted. This would include an overview of the mission, the role of each crew member, possible risks, and risk control measures. This can be carried out by any member of the team who should have a wide knowledge of the operation (Standard Operating Procedures Unmanned Aerial Vehicles, 2019).
5. Aerial imagery campaign
A systematic method in aerial imagery campaigns contributes largely to safe and successful flight activities. Actual aerial imaging is the litmus test for the effectiveness of the pre-flight preparation. The flight crew should be mentally and physically prepared to make immediate decisions and to take appropriate action during these activities.
Generally, an aerial imaging campaign begins with an assessment of the area and the weather conditions. Any minor deviations identified during the prior risk assessment stage should be addressed properly (e.g. large crowds, the presence of farm equipment) to ensure that no one would be harmed in the case of a mishap. The wind speed should be measured using a wind meter to determine its suitability for imaging, and based on the UAV operating limitations, and without compromising the quality of the images. Should all be well, the imagery will be pursued; if not, the mission should be aborted.
Under favourable conditions, the flight crew should establish themselves at the selected GCS location that was chosen during the risk assessment stage (discussed in Section 4). This should be followed by preparations in respect of the equipment and the mission area. The GCPs should be laid out or checked, depending on whether this was done during the risk assessment stage by either the pilot or the spotter. In the case of bungee cord launching, either the pilot or the spotter, who remain at the GCS, will assemble the drone and install the launch line. Ideally, take-off should be against the wind to help the drone gain height through lift (Dronegenuity, n.d.; Quantum System, 2021). The commander should check for any possible changes in the flight parameters, especially for launching and landing in the case of a fully autonomous flight. The flight track should be reoriented, depending on the actual wind direction in the area. The recommended flight track should be perpendicular to the wind direction (McEvoy et al., 2016; UAV Technology, n.d.). Pre-flight and pre-takeoff checks should be carefully followed before takeoff to ensure that all UAV components are functional (Allouch et al., 2019; Standard Operating Procedures Unmanned Aerial Vehicles, 2019). If any problems occur, the flight mission should not be pursued unless the observed problem has been resolved.
During a flight, each team member should focus on their specific functions. The pilot is responsible for the transmission /remote control of the UAV (a semi-autonomous drone) and should keep an eye on the UAV throughout the flight. The commander is in charge of the flight computer, gives up to-date information to the pilot about the status of the UAV, and takes note of the observed behaviour of the drone, based on the observations of the mission planner and the pilot. In the presence of the spotter, they must assist the pilot and keep an eye on the UAV while it is in the air. The real time monitoring of the link quality of the UAV and the GCS should be carried out, especially in cases of link degradation. Nevertheless, most automatic UAVs can operate autonomously in a safe manner, even in the case of link loss. In fact, they tend to finish the set flight plan without depending on the GCS (Allouch et al., 2019). Throughout the entire flight duration, each of the team members should be vigilant in respect of abrupt changes to wind speed and direction, since as a result of its light weight and small size, sudden changes in wind speed and direction will negatively affect the behaviour of the drone (Wang et al., 2019). A change in wind behaviour can be easily noticed through the movements of shrubs or trees in the surroundings. As shown in the mission planner, some UAVs have sensors that detect wind speed at their current flight altitude, while others do not. For the latter case, the wind strength at 121m (400ft) can be estimated to be double that of the wind speed at ground level (QuestUAV, 2017). Additionally, a strong wind may increase the duration of a flight and easily drain the UAV battery. For safe landing, only 80% of battery utilization should be allowed; the UAV should then be landed. This will help to prolong the battery life (UAV Technology, n.d.).
Landing the UAV is a very challenging aspect of drone operation, particularly in the case of semi-autonomous or manually controlled fixed-wing drones. In full autonomy, or with no human intervention, the drone will land according to the programmed path and location (Albeaino et al., 2019). The UAV has the capability to regulate speed by reducing the available power and navigating through its autopilot towards the programmed landing direction and location. On the other hand, for manually controlled or semi-autonomous drones, the pilot is responsible for overseeing he landing of the UAV. The landing could be either a ‘belly’ or parachute landing, but both require skills and confidence since any control via the transmitter that is incorrect could lead to a bad or hard landing that will seriously damage the drone.
During retrieval, the UAV battery should be immediately disconnected, especially for manually controlled or semi-autonomous drones. The reason behind this is that in the case of a person unintentionally pressing the transmission throttle bar, the motor will power up and pose a danger to those around the drone. The spinning propeller may cut anything, including human skin. Furthermore, the crew should inspect the drone before returning to the location of the GPS. This would be to facilitate retrieval in case some parts might have detached during the hard landing. All defects found should be recorded upon the completion of imaging and should be addressed prior to the next operation.
6. Post-flight
Post-flight activities include post-flight debriefing and UAV maintenance. The team should conduct post-flight debriefing to discuss the flight outcomes, including any unusual circumstances that might have affected the safety of the flight. The log f iles prove useful in analysing the reasons for these occurrences and in developing measures to prevent their recurrence in the future (Allouch et al., 2019). For example, during a flight, sudden changes in wind direction and speed, link loss, and unusual altitude drops might be observed. When the wind strengthens, it will be more difficult for the drone to move through the atmosphere which will increase the required flight time drastically (DeltaQuad Operation Manual, n.d.; Mesas-Carrascosa et al., 2015) and affect the quality of the captured images. In this case, the sound judgments of the flight crew, especially the pilot, are important, especially in cases where an emergency landing − due to the wind − is necessary. If unusual issues (e.g., an unexpected drop in altitude or frequent losses in connection, or even a malfunction of some sensors, thereby demanding corrective maintenance) occur, the flight must be aborted and the issue resolved before the next flight. .
UAV maintenance includes UAV checking, cleaning, repairs, and software updates. A post-flight maintenance checklist should be established to ensure that all required activities are carried out in an orderly manner and not skipped (Standard Operating Procedures Unmanned Aerial Vehicles, 2019). The maintenance logbook serves to document previous repairs and to easily identify parts that need to be replaced. This allows damage from previous flights to be easily traced and addressed prior to the next operation in order to ensure safe and successful flights. UAV maintenance is therefore always an integral part of the process for achieving f light safety and ensuring the longevity of the equipment. If necessary, the mission planner software should be updated immediately. Typically, a notification will appear on the mission planner interface that requires the system to be updated, as some systems do not allow the UAV to be flown with outdated flight-planning software.
7. Image processing and analysis
Image stitching can be achieved using image processing software. There are numerous software options, including Agisoft PhotoScan, Pix4D Mapper, Imagine UAV, and Drone Mapper, available, but they are not free (Legka and Aleksy, 2018). These software packages are typically able to process RGB, NIR, and multi spectral images, to construct orthophotos, to build 3D-models, and to generate detailed elevation maps. However, each software differs in terms of some of its specific functions. For example, unlike other software, Pix4Dmapper can support video and 360° image processing, while Agisoft PhotoScan can handle non-geo objects. The choice of image processing software should depend on the user’s project needs, rather than merely on the processing of the captured UAV images.
Image processing requires a wide range of computational resources, which increase exponentially as more images are concurrently processed (Fernández Guisuraga et al., 2018). Therefore, investments in software should be accompanied by the appropriate hardware. For instance, a computer with a 2.93GHz processor, 48GB RAM, and a 1TB Memory, installed with Pix4DMapper, can process 2000 images in 12-15 hours without any software malfunctions, provided that the machine is dedicated solely to image processing (Tidula et al., 2020).
Image analysis is usually performed after processing. It uses Geographic Information System (GIS) software to open and analyse stitched images. Several GIS applications are available, providing either an open source or a paid license to users. The most popular open-source GIS software is Quantum Geographic Information System (QGIS), while ArcGIS is the most widely used paid license. The World Health Organization (WHO) (2018) compared several open-source GIS programmes to ArcGIS and found that QGIS is on par with it in terms of supported operating systems, GUI friendliness, cartography, supported data formats, data manipulation and analysis, and integration with other open-source GIS frameworks, base maps, scripting, training sources, and technical support. While ArcGIS supports better statistical analysis functions, QGIS outperforms it in terms of integration with the other open source GIS platforms. The functionality of the GIS programme is affected by the computer resource, with at least 8GB RAMs but preferably 16GBs, or higher, and a minimum CPU speed of 2.2GHz required for optimal performance. Insufficient hardware configuration can cause GIS software to hang or crash when large GIS datasets are processed (Dempsey, 2013).
8. Conclusion
The use of fixed-wing drones has been increasing over recent years. To the best of our knowledge, this paper is the first to provide a holistic summary of important criteria needed for safe and successful f lights. As discussed in this paper, primary factors for successful aerial imageries include obedience to UAV regulations, equipment familiarization, and pre-flight preparation. The post-flight maintenance ensures the longevity of the equipment and addresses any unusual issues that may compromise the safety of future flights. Moreover, post-flight maintenance provides opportunities for operators to improve their familiarity with the associated systems.
The quality of captured images can be affected by various factors, such as the time of day that they were taken, image overlap, wind speed, and the type of sensor used. Furthermore, the quality of the stitch images (orthomosaics) produced is largely dependent on both the quality of the individual images and the processing software used. Additionally, the functionality of the processing software is highly dependent on the available processing resource, since image processing involves a significant amount of computation that grows exponentially with the number of images being processed. Therefore, investing in fixed-wing drones requires adequate investment in both software and hardware to ensure that high quality products can be produced.
Endnotes
1An aileron is a crucial part of an aircraft’s flight control system − a device on the wing − that allows pilots to control the aircraft’s orientation and movement (Lee, 2025)
2The time spent or wasted in accessing a SD card must be enough for the flight mission to be completed, especially at a location where the window of time for ideal imaging is minimal
9. References
Aeronautical Information Services, Malaysia. 2008, Unmanned Aerial Vehicle (UAV) Operations in Malaysian Airspace.Available at http://www.ukm. my/aaip/wp-content/uploads/2019/01/ AIC-2008.04-Unmanned-Aerial-Vehicle UAV-Operations-in-Malaysian-Airspace. pdf. (Date accessed: 26 April 2022)
Aerotas. n.d., ‘Ground Control – best practices.’ Available at: https://www. aerotas.com/planning-ground-control points. (Date accessed: 20 April 2020)
Albeaino, G., Gheisari, M., & Franz, B.W. 2019, A Systematic Review of Unmanned Aerial Vehicle Application Areas and Technologies in the AEC Domain, Journal of Information Technology in Construction, vol. 24 (July), pp 381–405.
Allouch, A., Koubaa, A., Khalgui, M., & Abbes, T. 2019, Qualitative and Quantitative Risk Analysis and Safety Assessment of Unmanned Aerial Vehicle Missions over the Internet, IEEE Access, vol. 7 (April), pp 53392–53410.
Boucher, P. 2015, Domesticating the Drone: the Demilitarisation of Unmanned Aircraft for Civil Markets, Scientific Engineering Ethics, vol. 21, pp 1393–1412.
Broadley, C. 2016, Real-life Stories of how a Drone can land You in Jail. Available at: https://www.whoishostingthis. com/blog/2016/08/24/drone-jail/. (Date accessed: 15 April 2020)
Chapman, A. 2016, Types of Drones: Multi-rotor vs Fixed-wing vs Single-rotor vs Hybrid VTOL, auav., Available at: https://www.auav.com.au/articles/drone types/. (Date accessed: 24 April 2020)
Chamola, V., Kotesh, P., Agarwal, A., Naren, Gupta, N. & Guizani, M. 2020, A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques, Ad Hoc Networks, DOI: 10.1016/j.adhoc.2020.102324
Choosing a Fixed-wing Drone. 2016, Heliguy Insider, Available at: https:// www.heliguy.com/blog/2016/03/01/ choosing-fixed-wing-drone/. (Date accessed: 24 April 2020)
DeltaQuad Operations Manual. n.d., Delta Quad Operations Manual V2. Available at: https://docs.deltaquad. com/deltaquad-operation-manual/v/ master/. (Date accessed: 26 April 2022)
Department of Civil Aviation, Malaysia. 2008, Unmanned Aerial Vehicle (UAV) Operations in Malaysian Airspace, Kuala Lumpur, Aeronautical Information Services, pp. 1–7.
Dempsey, C. 2013, Computer Specs for GIS Work’, GIS Lounge. Available at: https:// www.gislounge.com/computer-specs-for gis-work/.(Date accessed: 01 May 2020)
Domingo, D., Ole Ørka, H., Næsset, E., Kachamba, N., & Gobakken, T. 2019, Effects of UAV Image Resolution, Camera Type, and Image Overlap on Accuracy of Biomass Predictions in a Tropical Woodland, Remote Sensing, vol. 11, No. 8, pp 1–17.
DroneDeploy. 2017a, Choosing the Right Mapping Drone for your Business: Part I: Multi-rotor vs Fixed-wing Aircraft. Available at: https://medium.com/aerial acuity/choosing-the-right-mapping-drone for-your-business-part-i-multi-rotor vs-fixed-wing-aircraft-6ec2d02eff48. (Date accessed: 26 April 2022)
DroneDeploy. 2017b, Seven Ways to improve the Accuracy of your Drone Maps. Available at: https://blog.dronedeploy. com/seven-ways-to-improve-the-accuracy of-your-drone-maps-9d3161f05956. (Date accessed: 17 April 2020)
Dronenerds. n.d., The Evolution of Drones, Then and Now, Dronenerds:More than Drones Available at: https://enterprise. dronenerds.com/the-evolution-of drones/. (Date accessed: 24 April 2020)
Dronegenuity. n.d., How does wind affect drone flight? Available at: https://www.dronegenuity.com/ how-does-wind-affect-drone f lights/#:~:text=Strong%20winds%20 can%20make%20takeoff,flight%20 pattern%20by%20the%20wind. (Date accessed: 28 April 2022)
Easy Access Rules for Unmanned Aircraft Systems. 2021, UAS Operations in the ‘open’ category. Available at: https://www.easa.europa.eu/ document-library/easy-access-rules/ online-publications/easy-access-rules unmanned-aircraft-systems?page=5. (Date accessed: 26 April 2022)
European Aviation Safety Agency. 2015, A Proposal to create Common Rules for Operating Drones in Europe, Cologne, Germany.
Federal Aviation Administration. 2016, Operation and Certification of Small Unmanned Aircraft Systems. Available at: https://federalregister.gov/a/2016-15079. (Date accessed: 13 April 2020)
Fernández-Guisuraga, J., Sanz Ablanedo, E., Suárez-Seoane, S., & Calvo, L. 2018, Using Unmanned Aerial Vehicles in Postfire Vegetation Survey Campaigns through Large and Heterogeneous Areas: Opportunities and Challenges, Sensors, vol. 18, no.2.
Gao, M., Hugenholtz, C., Fox, T., Kucharczyk, M., Barchyn, T., & Nesbit, P. 2021, Weather constraints on global drone flyability, Scientific Reports. Available at: https://doi. org/10.1038/s41598-021-91325-w.
Gonzáles-Jorge, H., Martinez-Sánchez, J., Bueno, M. & Arias, P. 2017, Unmanned Aerial Systems for Civil Applications: a Review, Drones, doi:10.3390/drones1010002
Hobbs, A., & Herwitz, S.R. 2006, Human Challenges in the Maintenance of Unmanned Aircraft Systems, NASA;Moffett Field, CA, USA.
Kardasz, P., & Doskocz, J. 2016, Drones and Possibilities of their Use. Journal of Civil and Environmental Engineering, vol. 6, no. 3.
Hermann, S. & Markert, F. 2020, Drone Regulations Worldwide. Available at: https://drone-traveller.com/drone-laws asia/. (Date accessed: 15 April 2020)
International Civil Aviation Organization. 2015, Manual on Remotely Piloted Aircraft Systems (RPAS). Montréal, QC, Canada.
Knoops, R. 2018, The Importance of working with the Right Equipment: Five Challenges when selecting Drones for Mapping, GIM International: 3.. Available at: https://www.gim-international. com/content/article/five-challenges when-selecting-drones-for-mapping. (Date accessed: 16 April 2020)
Legka, Y., & Aleksy, B. 2018, Review: UAV Image Processing Software. Available at: http://www.50northspatial.org/uav-image processing-software-photogrammetry/. (Date accessed: 01 May 2020)
Lee, S. 2025, Ultimate guide to aileron in flight mechanics. Number Analytics. https://www.numberanalytics.com/ blog/ultimate-guide-to-aileron-in-flight mechanics. (Date accessed: 15 July 2025)
LIDARNews. 2019, Penalties for flying a Commercial Drone without a License. Available at: https://lidarnews.com/ articles/penalties-flying-drone-without license/. (Date accessed: 15 April 2020)
Liu, Y., Zhang, X., Wang, Z. Gao, Z. & Liu, C. 2021, Ground Risk Assessment of UAV Operations based on Horizontal Distance Estimation under Uncertain Conditions, Mathematical Problems in Engineering. Available at: https:// doi.org/10.1155/2021/3384870.
Master List of Drone Laws (Organized by State & Country). n.d. Available at: https://uavcoach.com/drone-laws/. (Date accessed: 15 April 2020)
McEvoy, J.F., Hall, G.P., & McDonald, P.G. 2016, Evaluation of Unmanned Aerial Vehicle Shape, Flight Path and Camera.
Type for Waterfowl Surveys: Disturbance Effects and Species Recognition, PeerJ, vol. 2016, no. 3, pp 1–21.
Mejias, L., Diguet, J.P., Dezan, C., Campbell, D., Kok, J., & Coppin, G. 2021. Embedded Computation Architectures for Autonomy in Unmanned Aircraft Systems (UAS), Sensors, 21, 1115. 10.3390/s21041115.
Mesas-Carrascosa, F.J., Torres-Sánchez, J., Clavero-Rumbao, I., García-Ferrer, A., Peña-Barragán, J., Borra-Serrano, I., & López-Granados, F. 2015, Assessing Optimal Flight Parameters for generating Accurate Multispectral Orthomosaics by UAV to support Site specific Crop Management, Remote Sensing, vol. 7, no. 10, pp 12793–12814.
MicaSense. n.d., Best Practices: Collecting Data with MicaSense Sensors. Available at: https://support.micasense.com/ hc/en-us/articles/224893167-Best practices-Collecting-Data-with MicaSense-RedEdge-and-Parrot-Sequoia. (Data accessed: 17 April 2020)
Oniga, V., Breaban, A., & Statescu, F. 2018, Determining the Optimum Number of Ground Control Points for obtaining High Precision Results based on UAS Images, Proceedings, vol. 2, pp 1–11.
O’Shea, M. 2020, What’s the droning noise? A good communication is essential to drone safety, FAA Safety Briefing. Available at: https://iflyamerica.org/ safety_communication_and_drone_safety. asp. (Date accessed: 3 May 2022)
Pavelka, K., Šedina, J., & Matoušková, E. 2018, High Resolution Drone Surveying of the Pista Geoglyph in Palpa, Peru, Geosciences (Switzerland), vol. 8, no. 12.
Pepe, M., Fregonese, L., Scaioni, M., & Pepe, M. 2018, Planning Airborne Photogrammetry and Remote- sensing Missions with Modern Platforms and Sensors, European Journal of Remote Sensing, vol. 51, no. 1, pp 412–436. Available at: https://doi.org /10.1080/22797254.2018.1444945.
Prisznyák, S. 2018, Drones and Jails, Scientific Bulletin, vol. 23, no. 1, pp 43–52.
Quantum System. 2021, Trinity F90+ User Manual V2.2.0.40, Quantum System GmbH, Germany.
QuestUAV 2017, Preparation for Fixed wing Flying: Insight into the Challenges and Solutions of operating Commercial Fixed-wing Drones V2.3, Amble, Northumberland, QuestUAV Ltd.
Ruzgiene, B. 2012, Requirements for Aerial Photography, Geodezija ir Kartografija, vol. 1541, pp 75–79.
Seifert, E., Seifert, S., Vogt, H., Drew, D., van Aardt, J.A., Kunnekke, A., & Seifert, T. 2019, Influence of Drone Altitude, Image Overlap, and Optical Sensor Resolution on Multi-view Reconstruction of Forest Images, Remote Sensing, vol. 11, no. 10.
Shawky, M. 2022, The importance of Risk Assessment in Drone Operations.. Available at: https://www.linkedin. com/pulse/importance-risk-assessment drone-operations-mohamed-shawky/. (Date accessed: 30 March 2022)
Shrestha, R., Zevenbergen, J.A., Panday, U.S., Awasthi, B., & Karki, S. 2019, Revisiting the Current UAV Regulations in Nepal: a Step towards Legal Dimension for UAVs’ Efficient Application, The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. 42, pp 107–114.
Shyu, L.S. & Hsiao, Y.C. 2014, Mini UAV design and manufacture with bungee launched / parachute recovery, Applied Mechanics and Materials, 610, pp 97-100.
Sims, R. n.d., 11 Tips for Awesome Landscape Drone Photography, Expert Photography. Available at: https://expertphotography.com/10 tips-awesome-drone-photography/. (Date accessed: 20 April 2020)
Singhal, G., Bansod, B., & Mathew, L. 2018, Unmanned Aerial Vehicle Classification, Applications and Challenges: a Review, Preprint (November).
Small Drone Market. 2018, Small Drones Market by Type (Fixed-wing, Rotary wing, Hybrid/Transitional), Application, MTOW (<5 kg, 5–25 kg, 25–150 kg), Payload (Camera, CBRN Sensors, Electronic Intelligence Payload, Radar), Power Source, and Region – Global Forecast to 2025. Available at: https:// www.marketsandmarkets.com/Market Reports/small-uav-market.-141134567. html#:~:text=The%20small%20 drones%20market%20is,17.04%25%20 from%202018%20to%202025. (Date accessed: 26 April 2022)
South African Civil Aviation Authority: Technical Guidance Material for RPAS Part 101. 2020. Available at: http://www.caa.co.za/Pages/RPAS/ Remotely Piloted Aircraft Systems. aspx. (Date accessed: 03 April 2020)
Standard Operating Procedures Unmanned Aerial Vehicles ( UAVs ). 2019, Surf Life Saving Services. Available at: https://www. surflifesaving.com.au/sites/site.test/files/
Standard Operating Procedures Unmanned Aerial Vehicles %28UAVs%29 – December 2019.pdf. (Date accessed: 25 May 2020)
Stöcker, C., Bennett, R., Nex, F., Gerke, M., & Zevenbergen, J. 2017, Review of the Current State of UAV Regulations, Remote Sensing, vol. 9, no. 5, pp 1-26.
Stopforth, R. 2017, Drone Licenses – Neccessities and Requirements, II Ponte, vol. 73, pp 149–156.
Tahar, K.N. 2013, An Evaluation on Different Numbers of Ground Control Points in Unmanned Aerial Vehicle Photogrammetric Block, International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences XL, November 2013, pp 27–29.
Tahar, K.N., Ahmad, A., Akib, W.A, & Mohd, W.M. 2012, Aerial Mapping using Autonomous Fixed-wing Unmanned Aerial Vehicles, 2012 IEEE Eighth International Colloquium on Signal Processing and its Applications, pp 164-168.
Tidula, T.J.T., Saliling, W.J.B., & Alucilja, R.M. 2020, Evaluation of Plant Reflectance Response with Elevation using Multispectral Images captured by an Unmanned Aerial Vehicle ( UAV ), Journal of Agricultural Research, Development, Extension, and Technology, vol. 2, no. 1, pp 1–12. https:// doi.org/10.5281/zenodo.8245557
Tmušić, G., Manfreda, S., Aasen, H., James, M., Gonçalves, G., Ben-Dor, E., Brook, A., Polinova, M., Arranz, J.J., Mészáros, J., Zhuang, R., Johansen, K., Malbeteau, Y., de Lima, I.P., Davids, C., Herban, S., & McCabe, M.F. 2020, Current Practices in UAS-based Environmental Monitoring, Remote Sensing, vol. 12, no. 6.
Torres-Sánchez, J., López-Granados, F., De Castro, A.I., & Peña-Barragán, JM. 2013, Configuration and Specifications of an Unmanned Aerial Vehicle (UAV) for Early Site-specific Weed Management, PLoS ONE, vol. 8, no. 3, pp 1–15.
Tsiamis, N., Efthymiou, L., & Tsagarakis, KP. 2019, A Comparative Analysis of the Legislation Evolution for Drone Use in OECD Countries, Drones, vol. 3, no. 75, pp 1–15.
UAV Technology n.d. Available at: https:// www.stars-project.org/en/knowledgeportal/ magazine/uav-technology/. (Date accessed: 27 April 2020)
Vasile, P., Ciaocă, C., Luculescu, D., Luchian, A., & Pop, S. 2019, Consideration about UAV Command and Control. Ground Control Station, Journal of Physics: Conference Series 1297(1).
Wackwitz, K. & Boedecker, H. 2015, Safety Risk Assessment for UAV Operation.
Wagstaff, K. 2015, Fail to register Your Drone? You could be hit with a $27K Fine. Available at: https://www.nbcnews. com/tech/innovation/fail-register-your drone-you-could-be-hit-27k-fine-n481856. (Date accessed: 15 April 2020)
Wang, B., Ali, Z.A., & Wang, D. 2020, Controllers for UAVs oppose Different Kinds of Wind in the Environment, Journal of Control Science and Engineering. Available at: https:// doi.org/10.1155/2020/5708970.
Wang, B.H., Wang, D.B., Ali, Z.A., Ting, B.T., & Wang, H. 2019, An Overview of Various Kinds of Wind Effects on Unmanned Aerial Vehicle, Measurement and Control (United Kingdom), vol. 52, no. 7–8, pp 731–739.
World Health Organization (WHO). 2018, Comparison of Geographic Information Systems (GIS) Software’, Geneva. Available at: https://www.who.int/ healthcluster/resources/publications/ OpenSourceGISComparison.pdf. (Date accessed: 01 January 2020)
Yeager, C. 2017, Good Timing: Find the Best Time of Day to fly your Drone, Envatotuts+.. Available at: https://photography.tutsplus. com/tutorials/the-best-time-to f ly-your-drone–cms-28360. (Date accessed:20 April 2020)
Yu, X. & Zhang, Y. 2015, Sense and avoid Technologies with Applications to Unmanned Aircraft Systems: Review and Prospects, Progress in Aerospace Science, vol. 17, 152-166
Zhang, C., & Kovacs, J. M. 2012, The application of small unmanned aerial systems for precision agriculture: A review, Precision Agriculture, vol 13, no. 6, pp 693–712
Zhang, X., Lui, Y., Zhang, Y., Guan, X., Delahaye, D., & Tang, L. 2018, Safety Assessment and Risk Estimation for Unmanned Aerial Vehicles operating in the National Airspace System, Journal of Advanced Transportation, vol. 2018, no. 2, pp 1-11.
The paper was originally published in South African Journal of Geomatics, Vol. 14. No. 2, July 2025. The paper is republished with authors’ permission.










 (No Ratings Yet)
(No Ratings Yet)





Leave your response!