| Positioning -New | |
Accuracy and repeatability investigation of CSRS-PPP online processing service
This paper investigates the accuracy and repeatability of the Canadian SpatialReference System (CSRS) Precise Point Positioning (PPP) or known briefl y as(CSRS-PPP) online processing service at different latitude regions |
 |
|
 |
|
With the advent of Global Navigation Satellite System (GNSS) technology and its data accessibility, many precise geodetic applications such as deformation mentoring have been achieved simply by saving time and efforts. Over the last decades, the differential technique has been the prevalent operational mode for precise positioning despite its need for at least two receivers and a reference station. Precise Point Positioning (PPP) is an alternative positioning method that employs a single GNSS receiver relying on the availability of precise ephemeris and clock products from International GNSS Service (IGS) or other organizations, and the usage of both carrier-phase and code range measurements. This technique has the merit that it needs only a single receiver and is without any requirements for establishing a reference station. In order to obtain accurate solutions, phase wind-up corrections, satellite and receiver antenna phase centre corrections, solid earth tide corrections and ocean loading corrections are necessary. On the other hand, the most important drawback in PPP is the long convergence time necessary for the float solution of ambiguity resolution, thus limiting its use for real-time applications and short static observations sessions.
In recent years, a number of free online GNSS processing services have been established. Those services provide users with the opportunity to freely obtain highly accurate coordinates with respect to a well-defined datum. The services use their dependent scientific software and each service has its specific procedure of data processing. The merits of these services are unlimited access, free of charge and do not require any prior experience with processing software packages. The role of the user is only to upload the observation file in RINEX format to the service’s webpage, and the results will be sent a few minutes later. The results are provided in the geographic coordinate’s formats or in a recognized datum like the International Terrestrial Reference Frame 2008 (ITRF2008). These online services are sponsored by a number of national organizations such as Natural Resources Canada (CSRS-PPP), National Geodetic Survey U.S.(OPUS) and Geoscience Australia (AUSPOS). Some of these services process only dual frequency observations and some can also process kinematic observations.
This study aims to assess the accuracy and repeatability of the CSRS-PPP online processing service at different latitude regions. For this purpose, dual frequency GPS data from four IGS stations distributed in different regions of the world, at high latitude, equatorial and mid latitude regions, have been used. The observations were collected in January and July and processed using CSRSPPP online service. The results were compared with the true coordinates of the stations. It is shown that the CSRS-PPP produces an accuracy at the ±(1 to 4) mm and ±(2 to 7) mm level for the horizontal and height components respectively. Furthermore, the repeatability ranges from ±(1 to 5) mm for both directions.
Online processing service
Recently, an alternative processing method to the traditional method has begun to be used widely. This method is internet-based online GNSS processing services. By using these services, the collected GNSS data are uploaded to particular internet sites and then the coordinates can easily be obtained a few minutes later. These services have several benefits, e.g. unlimited, free of charge, saving time without any need for processing software and saving money by operating with one receiver only. These services proved their accuracy, since a single receiver user can obtain accuracy in mm level [Enber and Featherstone, 2008]. Currently, there are five online processing services such as AUSPOS operated by the Geoscience Australia, CSRSPPP supervised by the Geodetic Survey Division of Natural Resource Canada, OPUS established by the U.S. National Geodetic Survey, SCOUT developed by Scripps Orbit and Permanent Array Center (SOPAC), and APPS (formerly Auto-GPISY) operated by Jet Propulsion Laboratory (JPL). Each service has its advantages, limitations and procedures for processing. For comparison among them, see [Ghoddousi and Dare, 2006].
Several studies on the performance of these processing services have been published [Ghoddousi and Dare, 2006 and Dawod et al., 2007]. For example, [Tsakiri, 2008] investigated the results of four online processing services such as CSRS, Auto-GIPSY, SCOUT and AUSPOS for both static and kinematic data processing. In static mode, observations from eight selected IGS stations were processed by each service. Solutions for 24 hour data were generally repeatable at 1 to 2 cm level within the accuracy of ±3 to ±4 cm level. However, the quality of results decreased as the time window decreased. In kinematic mode, two data sets were used. The first data set, 24 hour RINEX files from two IGS stations were processed by using kinematic mode in CSRS-PPP. The results were compared with their known coordinates. The second data set has collected on a moving vehicle. The CSRSPPP kinematic results were compared with a reference trajectory computed from Differential GPS. The positioning accuracy achieved on the kinematic mode was 5to 10cm level. Moreover, [Subaşi and Alkan, 2011]analyzed the accuracy of the AUSPOS, OPUS and SCOUT services by processing dual frequency observations of 6 Continuously Operating Reference Stations (CORS) located in Istanbul/Turkey. Two 24 hour RINEX files were used covering two different days where each file was divided into four subfiles. The observations were processed using the aforementioned processing services and the results were compared with their known coordinates computed from BERNESE software. The results indicated an overall accuracy level of 1to 22 cm from all services. However, SCOUT provided the best solutions.
Abdelazeem et al., 2011 compared the CSRS service and traditional differential processing technique for single frequency observations collected over three points, located in Egypt, forming three different baseline lengths and covering three different time windows. The findings revealed an overall 2Ddifference between the CSRS solution andthe differential solution at few decimeters level.
In this study, the CSRS-PPP online processing service is selected due to several reasons:
1. Its simple user interface and rapidity for sending solution to the user.
2. It processes both static and kinematic, single and dual frequency observations.
3. The service provides solution for data collected from any place in the world, in other words no region restriction.
4. It provides detail outputs such as pseudo-range residuals sky distribution, estimated tropospheric zenith delay and station clock offset.
5. CSRS-PPP processing results and achieved accuracies have been discussed in other previous studies, e.g., [Enber and Featherstone, 2008] used GPS observations of 46 points of a geodetic network, and compared the obtained CSRS-PPP results with the results of Bernese software. This study shows that the mean coordinate difference is 3.3 mm in east direction, 4.8 mm in north direction and 11.8 mm in height direction. Furthermore, [Grinter and Janssen, 2012] investigated the accuracy of CSRSPPP solutions for 20 CORS stations’ observation, located in Australia, based on different observation periods and then compared the results obtained with the true coordinates of these stations. This study shows that the accuracy specification defined as 25 mm in both Easting and Northing components, and 35 mm in Ellipsoidal Height for at least 4 hours data processed by CSRS-PPP.
Processing strategies of CSRS-PPP
As stated previously, the aim of this paper is to evaluate the performance of the CSRS-PPP online processing service for dual frequency observations at different latitude regions which reflect different ionospheric and tropospheric conditions. Therefore, this section concerns the procedures adopted by the CSRS-PPP for the correction of the ionospheric and tropospheric delays. However, for more details about service specifications, required steps for use, and description of output files, see [Natural Resources Canada, 2006].
For the ionospheric delay correction, for the L1 observations the service uses the global ionospheric maps produced at 2-hour interval in IONEX format by IGS [Schaer et al., 1998]. On the other hand, for the L1&L2 observations, the L1&L2 ionospheric-free combination of In case of tropospheric zenith delay determination, the service utilizes the Davis model for hydrostatic delay [Davis, et al., 1985] and the Hopfield model for wet delay [Hofmann-Wellenhofet al., 2008] depending on surface meteorological data. In addition to, Global Mapping Function (GMF) is used to determine the slant tropospheric delay [Boehmet, et al., 2006].
Test methodology
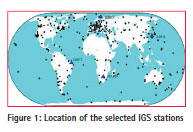
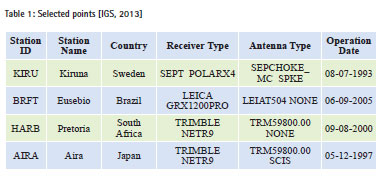
This study aims to evaluate both the accuracy and repeatability of the CSRS PPP online processing service for dual frequency observations at different latitude regions. For this purpose, four different IGS stations have been selected at different latitude regions where the points located in high latitudes, at the equator, in middlelatitude and at the coast of Pacific ocean (Figure 1). Table 1 lists the name of each station, their location, type of receiver, type of the installed antenna and operation date. The time of data sets were chosen to reflect seasonal variations in atmospheric status during the year, where two subsets of two complete weeks of data were involved. The first week is GPS week 1669 starting from 1 January 2012. The other is GPS week 1695 starting from 1 July 2012.
Each test week has different atmospheric conditions from the other. For the ionospheric delay, it is eliminated by using free linear combination. With regard to tropospheric effect, it depends on pressure, temperature, humidity and water vapor pressure at the observed point.
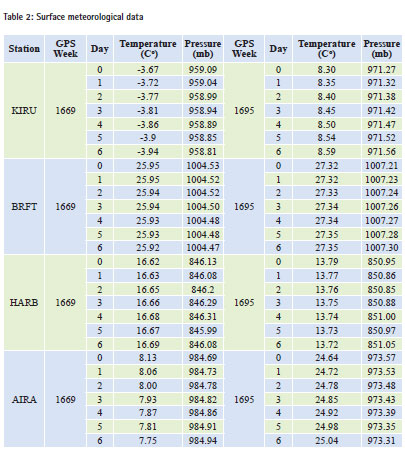
Therefore, the temperature and pressure values at the tested points are taken from the solution file provided by the service (Table 2), where those values are calculated by Global Pressure and Temperature (GPT) model [Boehmet, et al., 2007] with a default value for the relative humidity as 50% for the all points.
Each 24 hour dual frequency observation file in RINEX format for each station, with total number of 56 files (4×7×2), was submitted to CSRS-PPP for processing. The RINEX files were downloaded directly from [SOPAC, 2013]. The examination of coordinates obtained from CSRS-PPP includes; a comparison of the coordinate accuracy at individual stations and a comparison of the coordinate repeatability at individual stations.
As it is well known that, accuracy measures the absolute closeness of a measured quantity to its true value while, precision measures the degree of consistency between measurements depending on the size of the differences in a data set. Precision indicates the repeatability of the measurements since there is no need for the true value. In addition to, precision is dependent upon the environment of the observations, the quality of the instrument and the observer’s skills during the observation process.
Results and analysis
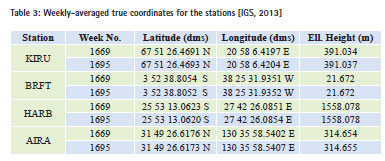
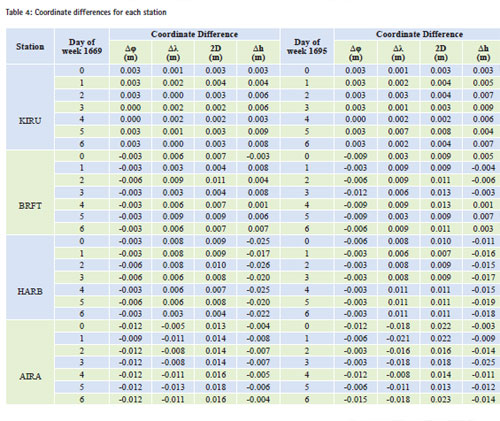
In order to evaluate the accuracy of the coordinates, the true Cartesian (X, Y, Z) coordinates for the four stations are referenced to ITRF- 2008 [Altamimi et al., 2011] at epoch of observations and are obtained from [ITRF, 2013]. The daily ITRF08 coordinates for each station is obtained and then the average solution of each week is calculated resulting to two true values for each station, i.e. week 1669 and week 1695. After that, the Cartesian coordinates are converted to geographical coordinates (φ, λ, h), for two different weeks; for week 1669 and 1695, referenced to the adopted GRS-80 ellipsoid [Schwieger, et al., 2009] and given in Table 3.The linear distances for longitude and latitude differences are calculated by using the algorithms given in [Clynch, 2006] with the usage of GRS- 80 parameters [Moritz, 2000] inTable 4.
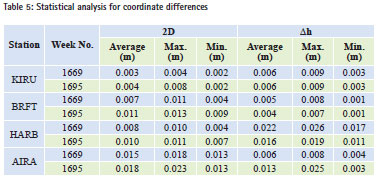
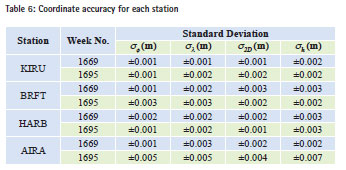
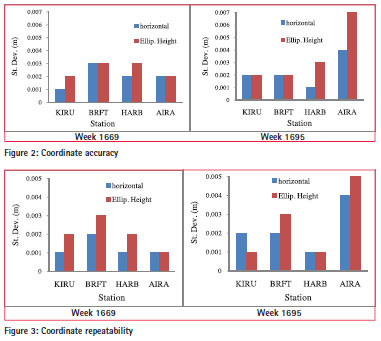
In addition, a statistical analysis for the coordinate differences are performed and provided in Table 5 for each station. As a measure of the accuracy, the standard deviation values for the differences from the true values are determined and given in Table 6 and Figure 2.
Based on Table 5 and with regards to week 1669, it can be seen thatthe average 2D differenceat high latitude region, KIRU station, is the closest to the true coordinates, while the solution is larger at BRFT, HARB and AIRA respectively. On the other hand for the height differences, the solution is at the same level for the all regions, except for HARB station at mid-latitude zone.
Regarding to week 1695 (Table 5), it can be seen that for the horizontal difference the solution is close to the true value at KIRU, and increases for the other stations especially at coastal station AIRA. Moreover, for the height differences, the results show closer values to the true value of KIRU and BRFT. The average difference increases at AIRA, while it decreases at HARB.
As a measure of the accuracy, Table 6 and Figure 2 demonstrate that for the first data set the accuracy is at the same level approximately for all stations with little increment at BRFT. For the second data set, the accuracy is the same for KIRU and BRFT, while it degrades at AIRA especially for the height component.
For point to point analysis, it can be seen from Table 6 and Figure 2 that for KIRU, the solution is at the same accuracy level for both data sets. For BRFT, the accuracy is at ±2-3 mm level in the two components for the two data samples. With regards to HARB which is characterized by its / or high altitude 1500m, the accuracy in the height component is equal for the two weeks and higher than the 2D component. For the fourth point AIRA, the accuracy decreased in week 1695 with respect to week 1669 in the two components. One of the reasons for that may be due to variation in atmospheric conditions, especially for temperature where it increased by three times in week 1695 comparing with week 1669 (Table 2).
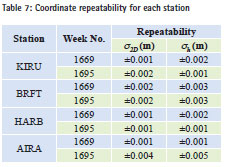
Another analysis of the results depends on the coordinate repeatability at single stations. The repeatability indicates the precision of the station solution, and as a measure of precision the standard deviation in horizontal and height components for the two successive difference values are calculated and given in Table 7. Further, the standard deviation values are given in Figure 3.
It can be concluded from Table 7 and Figure 3 that the repeatability error of the stations in case of the first week is in the ±1-3 mm range for the 2D and height differences. For week 1695, the repeatability error has the same range like week 1669 for KIRU, BRFT and HARB, while it decreases for AIRA in both components.
Looking at an individual station (Figure 3), e.g., KIRU in a high latitude region, it can be seen that the solution is repeatable in the range of ±1-2 mm. For BRFT at the equator, the repeatability of CSRSPPP is at the same level for the two data sets in±2-3 mm range. Moreover, CSRS-PPP provides a repeatability at the ±1-2 mm level for HARB. With regards to AIRA, the repeatability of CSRS-PPP varies from week 1669 to week 1695 by evidence values, and one of the reasons might be due to large variations in tropospheric parameters especially in temperature values.
Conclusion
The free of-charge and effective CSRSPPP online processing service provides accurate results for static mode. Also it provides a solution for kinematic observation mode for single and double frequency observations. CSRS-PPP provides geographic coordinates, projected coordinates and Cartesian coordinates. The convenience of the service leads to its wide usage in different surveying applications.
The objective of this study is to evaluate the accuracy and repeatability of CSRSPPP at different latitude regions by processing dual frequency GPS data from four IGS stations located in different regions around the world where the tested points are KIRU in a high latitude region, BRFT at the equator, HARB at midlatitude region and AIRA on the coast of the Pacific Ocean. The data sets cover two sessions with a 24 hours time window.
For station KIRU, CSRS-PPP provides accuracy and repeatability in the range of ±1-2 mm. With regards to BRFT, the accuracy and repeatability of CSRS-PPP is at the same level for the two data sets in ±2-3 mm range. Moreover, CSRSPPP provides in the range of ±2-3 mm and at the ±1-2 mm level for HARB. With regards to AIRA, the accuracy of CSRS-PPP varies from week 1669 to week 1695 by noticeable values as well as for the repeatability. Finally, the attained results show that CSRS-PPP provides the horizontal accuracy at ±(1 to 4) mm level and the vertical accuracy at ±(2 to 7) mm level. Regarding to the repeatability error, it is at ±(1 to 5) mm level for both the components.
References
Abdelazeem M., Farah A. and Farag F. A., 2011,Assessment Study of Using Online (CSRS)GPS-PPP Service for Mapping Applicationsin Egypt,J. Geod. Sci., 1, 3, 233-239.
AltamimiZ., Collilieux X., Métivier L., 2011, ITRF2008: an improved solution of the international terrestrial reference frame, J. Geod., 85, 8, 457-473.
Boehm J.,Niell A., Tregoning P. and SchuhH., 2006, Global Mapping Function (GMF): A new empirical mapping functionbased on numerical weather model data, Geophys. Res. Let., 33, 7, 1-4.
Boehm J.,Heinkelmann R., Schuh H., 2007, Short Note: A global model of pressure and temperature for geodetic applications. J. Geod., 81,10, 679-683.
Clynch J.R., 2006,Radius of the Earth – Radii Used in Geodesy,Technical Notes Davis J.L., Herring T.A.,Shapiro I.I., Rogers A.E.E., and Elgered G., 1985, Geodesy by radio interferometry: effects of atmospheric modeling errors on estimates of baseline length, Rad. Sci., 20,6, 1593-1607.
Dawod G., Ismail S. and Mohamed H., 2007,Assessmentof A Cost-Effective GPS Data Processing Alternative In Egypt Utilizing International Online Processing services,Civ. Eng. Res. Mag. (CREM), Al-Azhar College of Engineering, 29, 2, 1-12. Ebner R. and Featherstone W., 2008,How Well Can On-line GPS PPP Post-processing Services Be Used To EstablishGeodetic Survey Control Networks,J. App. Geod., 2,3, 149-157.
Ghoddousi-Fard R. and Dare P., 2006,Online GPS Processing Services: an Initial Study,GPS Sol., 10,1,12-20.
Grinter T. and Janssen V., 2012,Post-Processed Precise Point Positioning: A Viable Alternative?,17th Association of Public Authority Surveyors Conference(APAS), Australia, 83-92.
Hofmann-Wellenhof, B., Lichtenegger, H., Wasle, E., 2008, GNSS – GlobalNavigation Satellite Systems, Springer, Vienna, ISBN 978-3-211- 73012-6.
International GNSS Service, 2013, http://igscb.jpl.nasa. gov, Accessed 5 May 2013. International Terrestrial Reference Frame, 2013, http://itrf.ensg.ign. fr/, Accessed 5 May 2013. Moritz H., 2000,Geodetic Reference System 1980,J. Geod., 74,1,128-162.
Natural Resources Canada,2004,On- Line Precise Point Positioning Project- How To Use Document, Version 1.1.
Schwieger V.,Lilje M. and Sarib R., 2009,GNSS CORS – Reference Frames and Services,7th FIG Regional Conference, Hanoi, Vietnam. Scripps Orbit and Permanent Array Center, 2013, http://sopac.ucsd. edu/dataArchive/dataBrowser. html, Accessed 5 May 2013.
Schaer S., Gurnter W. and Feltens J., 1998,IONEX: TheIONosphere Map Exchange Format Version 1, Proceeding of theIGS AC workshop, Darmstadt, Germany.
Subaşi H. K. and Alkan R. M., 2011,Analysis of Internetbased GPSprocessing service,Coordinates, 7,10,11-15.
Tsakiri M., 2008,GPS Processing UsingOnline Services, J. Surv. Eng., 134, 4,115-125.












 (4 votes, average: 2.25 out of 5)
(4 votes, average: 2.25 out of 5)




Leave your response!