Flight Tests results
Static Points
In all static tests points GADA's
performance was satisfactory.
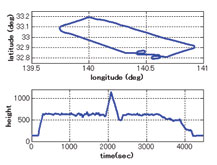
As example for the lateral attitude
stabilization maneuver with f =
+25.86º ± 2.76º @1s (Fig. 9), it is
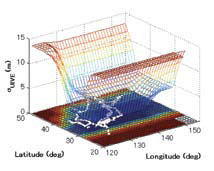
possible to verify that SV #14 LOS
were mostly bellow HAP (Fig. 10).
As results it is also possible to verify
that in this flight condition GADA
kept its accuracy while REQUEST
diverged (Fig. 11 to 13).
Dynamic Points
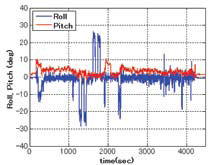
The analysis of the dynamic maneuvers
it was noticed that GADA's errors
increased with the angular speed. When
the aircraft is performing the capture of
the longitudinal attitude maneuver (Fig.
14) with a roll rate ?±55º/s, it is possible
to notice the error build up between the
FTI reference attitude and the GADA's
computed attitude (Fig. 15 to 17). Dynamic error analysis
The functional analysis of the Phase
Locked Loop - PLL (Fig. 18) of a GPS
receiver [17], could explain these dynamic
errors (Fig. 15 to 17). When the aircraft
is maneuvering, the rate of change of the
Doppler shift may result in a difference
between the real phase (i.e. the input at the
PLL) and the corresponding NCO phase
measurement (i.e. output measurement).
Considering the topology presented
Fig. 11 - ? Attitude error during the Lateral
Attitude Stabilization Maneuver.
Fig. 12 - f Attitude error during the Lateral
Attitude Stabilization Maneuver
Fig. 10 - Angle between satellite LOS and
HAP during the Lateral Attitude Stabilization
Maneuver.
28 | May 2009
in fig. 18, the transfer function
of the PLL is expressed by:
Where: ? is the damping factor (adm);
and ?N is the natural frequency (rd/s).
In dynamic conditions there is a phase
delay error between the true phase
(i.e. what we want to measure) and the
NCO generated phase (i.e. the resulting
measurement provided by the receiver).
The capture of the longitudinal attitude
maneuver increases the phase rate (Fig.
19) and the associated phase error.
To investigate this effect it
would be necessary to:
1. Simulate the same flight
condition in order to get the
true phase measurement;
2. Apply the simulated phase to
the receiver PLL model;
3. To compute GADA attitude solution
with the PLL resulting phase; and
4. To compare the resulting
GADA attitudes (i.e. Simulated
and the flight tests ones).
But the true characteristics of a
commercial off the shelf GPS receiver
PLL is proprietary and the manufacturer
does not disclosures such information.
So alternatively it was employed a
system identification process (Fig. 21)
to best estimate the PLL coefficients
and topology for each GPS receiver.
Then it was possible to compare the
dynamic errors measured at the flight tests
campaign with the simulated errors. The
resulting analysis presents an acceptable
DPLL modeling (Fig. 22 to 24).
Conclusions
The development and the evaluation of
GADA’s static and dynamic characteristics
are presented and the results are
considered satisfactory for the application.
The results show that GADA’s
accuracy is dependent of the
receiver DPLL characteristics.
Future works should use a software GPS
receiver, where the setup of the DPLL
coefficients and topology, allows:
1) The validation of the dynamic
behavior of an off-theshelf
GPS receiver; and
2) The design of customized GPS
receivers, for specific high
dynamics applications.
Also GADA should be evaluated
in other test beds, that flies over
an extended envelope and thus
in a higher dynamic range.
Acknowledgments
We wish to thank the partial support given
by the Flight Test Group, for supporting
the measurement and the flight tests
campaigns. Also we like to tank FINEP
under agreement 01.07.0663.00 and
01.07.0540.00 that respectively funded
the telemetry system used for the flight
tests campaign and its spares parts.
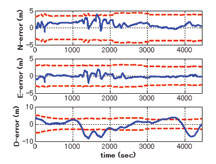
Fig. 18 - GPS receiver phase tracking loop
block diagram
Reference:
[1] ETKIN, B. Dynamics of
Atmospheric Flight. New York:John Willey & Sons, 1972.
[2] COHEN, C. E. Attitude
Determination. In: AIAA. Global
Positioning System: Theory and
Applications. Washington: AIAA,
1996, v.2, cap.19, p. 519-537.
[3] Shuster, M. D.; Oh, S. D. Threeaxis
Attitude Determination
from Vector Observations. IEEE
Journal of Guidance and Control,
Washington, v. 4, n.1, p. 70-77, 1981.
[4] BAR-ITZHACK, I., Y. REQUEST:
A Recursive Quest Algorithm for
Sequential Attitude Determination.
IEEE Journal of Guidance and
Control and Dynamics, Washington,
v.19, n.5, p. 1034-1038, 1996.
[5] STEVENS, B. L., and LEWIS, F.
L., Aircraft Control and Simulation,2nd ed. Hoboken, NJ: John Wiley& Sons, Inc. 2003, ch. 1.3.
[6] BAR-ITZHACK, I, Y; Y.
MONTGOMERY, Y; and GARRICK
J. C., Algorithms for Attitude
Determination using the Global
Positioning System, IEEE Journal of
Guidance and Control and Dynamics,
vol. 21, nº 6, pp. 846–852, 1998.
[7] BALANIS, C. A. Antenna Theory
Analysis and Design. New Jersey:
John Willey & Sons, 2005,
3rd ed., cap. 2.2, p. 33-38.
[8] ELROD. B. D; BALTROP. K;
DIERENDOCK. V. A. J. Testing
GPS Augmented with Pseudolites
for Precision Approach Applications.
In: Institute of Navigation National
Technical Meeting of the Satellite
Division (ION-GPS), 1994, Salt
Lake, Proceedings … Salt Lake:
ION-GPS, 1994. p. 1269-1278.
[9] ELROD B. D; DIERENDONK.
V. A. J. Pseudolites. In: AIAA.
Global Positioning System: Theory
and Applications. Washington:
AIAA, 1996, v.2, cap.2, p. 51-79.
[10] Leite, N. P. O; Walter, F. The
Development and Simulation Results
of a GPS Attitude Determination
System. In: Institute of Navigation
National Technical Meeting of the
Satellite Division (ION-GPS), 2002,
Portland. Proceedings … Portland:
ION-GPS, 2002. p. 1100-1107.
[11] SOUSA, L. B. R.; Leite, N. P.
O.; CUNHA, W. C.; and Walter,
F. Automation System for the
Flight Test Laboratory (SALEV).
In: International Telemetering
Conference (ITC/USA), 2006, SanDiego. Proceedings … San Diego:
ITC/USA, 2006. p. 94-103.
[12] EUROPEAN ACCREDITATION.
EA-4/02 - Expression of the
Uncertainty of Measurement
in Calibration., 1999. 79p.
[13] Leite, N. P. O.; Walter, F. Multiple
Time Base Synchronization Process
Applied to the Flight Tests Campaign
of a GPS Attitude Determination
Algorithm. In: International
Telemetering Conference (ITC/USA),
2007, Las Vegas. Proceedings … Las
Vegas: ITC/USA, 2007. p. 1048-1057.
[14] Leite, N. P. O.; Walter, F. The
Development of an Alignment
Process to be Used on Flight
Test Campaign of a GPS Attitude
Determination System. In: Institute
of Navigation National Technical
Meeting (ION-NTM), 2003,
Anaheim. Proceedings … Anaheim:
ION-NTM, 2003. p. 152-162.
[15] SPILKER, J. J. Satellite Constellation
and Geometric Dilution of Precision.
In: AIAA. Global Positioning System:
Theory and Applications. Washington:
AIAA, 1996, v.1, cap.5, p. 177-208.
[16] Yoon, S; Lundberg, J. B. Euler
Angle Dilution of Precision in
GPS Attitude Determination. IEEE
Transactions on Aerospace and
Electronic Systems, New York, v.
37, n.03, p. 1077-1083, 2001.
[17] DIERENDOCK. V. A. J. GPS
Receivers. In: AIAA. Global
Positioning System: Theory and
Applications. Washington: AIAA,
1996, v.1, cap.8, p. 329-407.
|
